一種清潔機器人語音控制系統及方法與流程
本發明涉及清潔機器人,尤其涉及一種清潔機器人語音控制系統及方法。
背景技術:
1、近年來,隨著科技的發展和人們生活水平的提高,清潔機器人逐漸成為現代家庭和辦公場所中不可或缺的一部分,清潔機器人通過自動化技術實現了對地面的高效清潔,解放了人們的雙手,現有的清潔機器人在實際使用中仍面臨許多挑戰,尤其是在復雜環境中的導航和控制方面。
2、語音控制技術作為一種自然且便捷的交互方式,已經廣泛應用于智能家居設備中,用戶可以通過語音指令直接控制設備,避免了傳統按鍵或遙控器操作的繁瑣步驟,在實際應用環境中,清潔機器人常常需要在嘈雜環境中工作,如家庭中存在電視、音樂或人聲等背景噪聲,這對語音控制系統提出了更高的要求,傳統的語音識別系統在噪聲環境中性能顯著下降,無法準確識別用戶指令,且在復雜語義理解和上下文記憶方面存在不足,這嚴重影響了用戶體驗和設備的實用性。
技術實現思路
1、本部分的目的在于概述本發明的實施例的一些方面以及簡要介紹一些較佳實施例。在本部分以及本技術的說明書摘要和發明名稱中可能會做些簡化或省略以避免使本部分、說明書摘要和發明名稱的目的模糊,而這種簡化或省略不能用于限制本發明的范圍。
2、鑒于上述現有一種清潔機器人語音控制系統及方法存在的問題,提出了本發明。
3、因此,本發明目的是提供一種清潔機器人語音控制系統及方法,其適用于解決傳統的語音識別系統在噪聲環境中性能顯著下降,無法準確識別用戶指令,且在復雜語義理解和上下文記憶方面存在不足的問題。
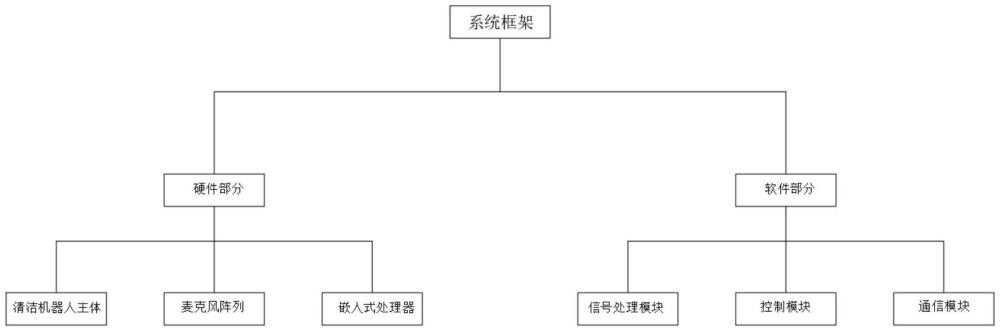
4、為解決上述技術問題,本發明提供如下技術方案:一種清潔機器人語音控制系統,包括:
5、清潔機器人主體,配備運動控制模塊、清潔模塊和電源管理模塊;
6、麥克風陣列,用于多方向拾取語音控制信號;
7、嵌入式處理器,用于處理語音信號和執行控制命令;
8、信號處理模塊,其包括噪聲過濾算法、語音識別引擎和語義理解引擎;
9、控制模塊,包括路徑規劃算法和任務管理模塊;
10、通信模塊,用于機器人與用戶之間的語音交互。
11、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:所述麥克風陣列配置為多方向麥克風,形成陣列結構,用于多角度拾音。
12、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:所述信號處理模塊包括用于初步濾波和降噪的預處理模塊,采集多通道音頻信號。
13、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:所述噪聲過濾算法公式如下:
14、
15、其中,y(t)表示在時刻t經過噪聲過濾后的增強語音信號,xi(t)表示第i個麥克風在時刻t的輸入信號,表示來自不同方向的語音和噪音信號,ωi(t)表示第i個麥克風信號的自適應權重,表示信號處理算法分配給每個麥克風的權重,m表示麥克風的數量,表示系統中麥克風陣列的總數。
16、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:在噪聲過濾過程中,關鍵在于確定信號增強和噪聲抑制的閾值;
17、信號能量閾值公式如下:
18、
19、波束形成公式如下:
20、z(t)=hty(t)
21、其中,h為表述形成的方向向量;
22、綜上,若es>θs,則認為信號增強有效,否則,需要調整自適應濾波器或波束形成參數;
23、噪聲能量閾值公式如下:
24、
25、若en<θn,則認為噪聲抑制有效,否則需要進一步優化噪聲過濾算法。
26、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:信噪比閾值計算公式如下:
27、若sng>θsng,則認為信號質量達到預期標準,否則,重新調整系統參數。
28、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:所述實時路徑規劃算法公式如下:
29、
30、其中,p(t)表示在時刻t機器人的期望路徑位置向量,r(t0)表示初始時間t0機器人的位置向量,v(t)表示機器人在時間t的速度向量,表示機器人移動的速度和方向,oi(t)表示第i個障礙物在時間t位置向量,ωi表示第i條路徑的權重系數,α調節參數,用于控制障礙物對路徑規劃的影響范圍,n表示障礙物的數量。
31、作為本發明所述一種清潔機器人語音控制系統的一種優選方案,其中:在路徑規劃過程中,關鍵在于確定機器人在接近目標位置和避開障礙物時的行為閾值,以下是閾值設定和相應的判斷條件:
32、假設機器人在二維平面上運動,其當前位置為:p(t)=[x(t),y(t)],目標位置為:g=[xg,yg],障礙物位置為:
33、則,距離目標位置閾值為:dg=||p(t)-g||;
34、若,dg<θg,則認為機器人已經接近目標位置,反之,繼續調整路徑;
35、避開障礙物閾值為:
36、若,則認為機器人成功避開障礙物,反之,則需要重新規劃路徑;
37、速度閾值為:||v(t)||≤vmax;
38、若,||v(t)||>vmax,則需要限制速度,保證安全。
39、9.根據權利要求1所述的一種清潔機器人語音控制系統,其特征在于:綜合閾值判斷公式如下:
40、
41、其中,j(t)為綜合判斷指標,xi(t)為第i個麥克風在時間t的輸入信號,wi(t)表示第i個麥克風信號的自適應權重,||r(t)-oi(t)||表示機器人當前位置r(t)與第i個障礙物位置oi(t)之間的距離,設置一個綜合閾值tt,用于判斷系統再當前時間t的運行狀態;
42、若j(t)≥tt,則系統判斷運行正常;
43、若j(t)<tt,則系統判斷需要調整,進一步優化信號處理或路徑規劃算法。
44、一種清潔機器人語音控制方法,所述語音控制方法適用于以上任意一種語音控制系統,且語音控制方法包括以下步驟:
45、s1:語音指令輸入:用戶通過麥克風陣列發出語音指令,系統采集多通道音頻信號;
46、s2:信號處理:通過噪聲過濾和信號增強技術,提取清晰的語音信號;
47、s3:語音識別與理解:系統將語音信號轉換為文本,并通過語義引擎理解用戶指令;
48、s4:指令執行:控制模塊根據語音指令規劃路徑和分配清潔任務,機器人執行相應操作;
49、s5:實時反饋與調整:系統根據環境變化和用戶新指令,實時調整機器人動作并提供語音反饋。
50、本發明的有益效果:通過麥克風陣列和信號處理技術,有效過濾背景噪聲,增強目標語音信號的清晰度,即使在嘈雜環境下,語音命令依然能夠被準確識別,這顯著提升了用戶與清潔機器人之間的交互效率和準確性;
51、本發明的語音控制系統采用了深度學習和自然語言處理(nlp)技術,能夠理解復雜語義和上下文信息,使用戶可以用更自然的語言與清潔機器人互動,通過語義上下文記憶功能,系統還可以記住并參考用戶的歷史指令,進一步優化當前指令的處理;
52、本發明集成了實時路徑規劃算法和動態避障技術,使清潔機器人能夠根據環境變化實時調整移動路徑,即使在復雜和動態的環境中,機器人也能靈活避開障礙物,確保清潔任務的高效執行。
- 還沒有人留言評論。精彩留言會獲得點贊!