一種基于AI模型的定位方法、設備及存儲介質與流程
本技術涉及無線通信,尤其涉及一種基于ai模型的定位方法、設備及存儲介質。
背景技術:
1、在新空口(new?radio,nr)系統或長期演進(long?term?evolution,lte)系統中,通常需要基于基站來對用戶設備(user?equipment,ue)移動性進行管理,例如對ue進行定位。為實現ue的移動性管理,定位的準確性顯得尤為重要。人工智能(artificialintelligence,ai)被引入無線通信網絡中,可以應用于ue的定位場景中。
2、在一些相關方案中,可以利用針對不同環境參數組合訓練得到多個ai模型形成模型庫,將模型庫部署在位置管理功能(location?management?function,lmf)網元。進行位置確定時,獲取當前需要定位的ue的實際環境參數組合,從模型庫中匹配出訓練集生成和模型訓練時采用的環境參數組合與實際環境參數組合相同的ai模型,將該ai模型的輸出作為定位結果。
3、但是在實際應用中,訓練得到的ai模型的數量一般有限,而現實環境非常復雜,可能無法針對所有的環境參數組合都存在對應的ai模型,導致根據ue的實際環境參數組合可能匹配不到適用的ai模型而無法完成定位。
技術實現思路
1、為了解決上述問題,本技術提供了一種基于ai模型的定位方法、設備及存儲介質,可以利用多個當前的環境參數匹配程度較高的ai模型進行定位并根據權重對定位結果進行融合,以獲取準確的最終定位結果。
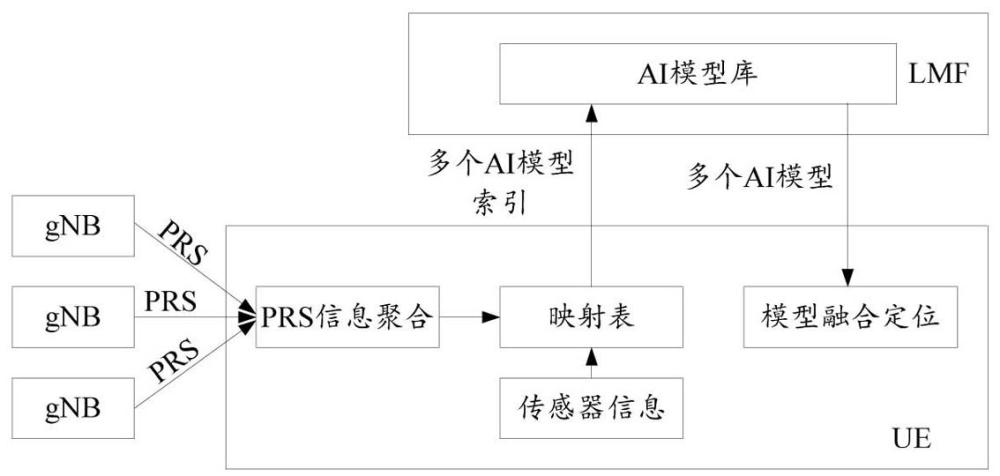
2、第一方面,本技術提供了一種基于ai模型的定位方法,可以應用于終端設備,該方法包括:利用接收定位參考信號prs和環境參數組合,確定匹配的一個或多個ai模型索引,所述環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;發送第一索引信息,所述第一索引信息包括所述一個或多個ai模型索引;接收與所述一個或多個ai模型索引中的每個ai模型索引分別對應的ai模型;利用所述環境參數組合確定每個所述ai模型輸出的定位結果的權重;利用所述prs、各所述ai模型以及各所述ai模型對應的權重,確定最終定位結果。
3、此實現方式中,由終端設備可以確定出一個或者多個用于定位的ai模型對應的ai模型索引,然后將所有的ai模型索引發送至網絡設備,即發送至lmf網元。lmf網元根據各個ai模型索引從ai模型庫中匹配出對應的ai模型并發送至終端設備。終端設備可以確定出各個ai模型對應的權重,并利用各個ai模型和對應的權重確定最終定位結果。現有技術中,當無法確定出與ue當前的環境參數組合完全匹配的ai模型時,會直接認為無法完成定位,而本方案可以利用多個與終端設備當前的環境參數匹配程度較高的ai模型進行定位,并根據權重進行定位結果的融合,進而獲取較為準確的最終定位結果。尤其適用于現實環境復雜多變的服務區域,或者用于定位的ai模型訓練不充分的區域,具有較高的實用性。
4、同時,該方式lmf網元將ai模型發送至終端設備后,對于終端設備側需要進行連續定位的場景,ue側可以直接利用接收的ai模型進行定位,后續如果環境參數組合未發生變化,則不再需要與lmf網元進行頻繁交互,因此降低了定位的時間延遲。
5、在一種可能的實現方式中,prs中攜帶小區標識cell?id、參考信號接收功率rsrp和相對基站的到達角度aoa中的一項或者多項。
6、在一種可能的實現方式中,prs中攜帶小區標識cell?id,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數中的一項或多項,其中,空間區域編碼指示各cell?id對應的小區所處的網格區域,時間狀態參數用于指示定位時間,場景狀態參數為終端設備所處場景的標識;?網絡設備的狀態參數指示網絡設備的參數配置。
7、在一種可能的實現方式中,場景狀態參數由終端設備利用多種傳感器的檢測結果確定,傳感器包括以下中的一種或多種:氣壓傳感器、加速度計、陀螺儀。
8、在一種可能的實現方式中,prs中攜帶小區標識cell?id,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用接收定位參考信號prs和環境參數組合,確定匹配的一個或多個ai模型索引,包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將cell?id的數量大于或等于第一閾值的交集對應的空間區域編碼作為第一篩選條件;當定位時間與時間區間對應的基準值之間的時間間隔小于預設間隔時,將時間區間對應的時間狀態參數作為第二篩選條件,時間區間對應的基準值為時間區間的中間值;將所處場景狀態參數作為第三篩選條件;根據網絡設備的狀態參數確定第四篩選條件;根據第一篩選條件、第二篩選條件、第三篩選條件和第四篩選條件,以及環境參數組合與ai模型索引的映射表,確定匹配的一個或多個ai模型索引。
9、在一種可能的實現方式中,prs中攜帶小區標識cell?id和rsrp,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用接收定位參考信號prs和環境參數組合,確定匹配的一個或多個ai模型索引,包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將滿足以下條件的交集對應的空間區域編碼作為第一篩選條件:rsrp大于或等于預設功率閾值的cell?id的數量大于第一閾值;當定位時間與時間區間對應的基準值之間的時間間隔小于預設間隔時,將時間區間對應的時間狀態參數作為第二篩選條件,時間區間對應的基準值為時間區間的中間值;將所處場景狀態參數作為第三篩選條件;根據網絡設備的狀態參數確定第四篩選條件;根據第一篩選條件、第二篩選條件、第三篩選條件和第四篩選條件,以及環境參數組合與ai模型索引的映射表,確定匹配的一個或多個ai模型索引。
10、在一種可能的實現方式中,prs中攜帶小區標識cell?id、rsrp和相對基站的aoa,利用接收定位參考信號prs和環境參數組合,確定匹配的一個或多個ai模型索引,包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將滿足以下條件的交集對應的空間區域編碼作為第一篩選條件:rsrp大于或等于預設功率閾值,且相對基站的aoa滿足預設角度范圍的cell?id的數量大于第一閾值;當定位時間與時間區間對應的基準值之間的時間間隔小于預設間隔時,將時間區間對應的時間狀態參數作為第二篩選條件,時間區間對應的基準值為時間區間的中間值;將所處場景狀態參數作為第三篩選條件;根據網絡設備的狀態參數確定第四篩選條件;根據第一篩選條件、第二篩選條件、第三篩選條件和第四篩選條件,以及環境參數組合與ai模型索引的映射表,確定匹配的一個或多個ai模型索引。
11、在一種可能的實現方式中,網絡設備的狀態參數指示網絡設備的參數配置,利用環境參數組合確定每個ai模型輸出的定位結果的權重,具體包括:根據作為第一篩選條件的各空間區域編碼對應的交集中的cell?id的數量,確定各ai模型的第一權重系數,第一權重系數與交集中的cell?id的數量正相關;根據時間間隔,確定各ai模型的第二權重系數,第二權重系數與時間間隔負相關;根據場景狀態參數確定各ai模型的第三權重系數;根據網絡設備的狀態參數確定各ai模型的第四權重系數;?根據各第一權重系數、各第二權重系數、各第三權重系數和各第四權重系數確定,確定各ai模型的權重系數;對各ai模型的權重系數進行歸一化處理,以獲取各ai模型的權重,各ai模型的權重的和為1。
12、在一種可能的實現方式中,網絡設備的狀態參數指示網絡設備在不同時間段的參數配置,根據各第一權重系數、各第二權重系數、各第三權重系數和各第四權重系數確定,確定各ai模型的權重系數,包括:對于每個ai模型,執行以下步驟:對第一影響因子和第一權重系數的乘積、第一影響因子和第三權重系數的乘積、第二影響因子和第二權重系數的乘積、第二影響因子和第四權重系數的乘積進行求和,以確定每個ai模型的權重系數,其中第一影響因子大于第二影響因子。
13、在一種可能的實現方式中,利用prs、各ai模型以及各ai模型對應的權重,確定最終定位結果,包括:將prs作為各ai模型的輸入,以獲取各ai模型輸出的定位結果;將各ai模型輸出的定位結果與各ai模型對應的權重相乘后得到各ai模型對應的最終定位結果分量;將各ai模型對應的最終定位結果分量疊加后得到最終定位結果。
14、第二方面,本技術還提供了一種基于ai模型的定位方法,可以應用于終端設備,該方法包括:發送環境參數組合和定位參考信號prs,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;接收一個或多個ai模型,一個或多個ai模型中的每個ai模型分別對應一個ai模型索引,各ai模型索引由環境參數組合和prs確定;利用環境參數組合確定每個ai模型輸出的定位結果的權重;利用prs、各ai模型以及各ai模型對應的權重,確定最終定位結果。
15、此實現方式中,終端設備將環境參數組合和prs發送至lmf網元后,由lmf可以確定出一個或者多個用于定位的ai模型對應的ai模型索引,然后lmf網元根據各個ai模型索引從ai模型庫中匹配出對應的ai模型并發送至終端設備。終端設備側確定各個ai模型分別對應的權重后,利用各個ai模型和對應的權重確定最終定位結果。現有的相關方案中當無法確定出與終端設備當前的環境參數組合完全匹配的ai模型時,會直接認為無法完成定位,而本技術實施例提供的方案可以利用多個與終端設備當前的環境參數匹配程度較高的ai模型進行定位,并根據權重進行定位結果的融合,進而獲取較為準確的最終定位結果。尤其適用于現實環境復雜多變的服務區域,或者用于定位的ai模型訓練不充分的區域,具有較高的實用性。
16、同時,該方式lmf網元將ai模型發送至終端設備后,對于終端設備側需要進行連續定位的場景,終端設備側可以直接利用接收的ai模型進行定位,后續如果環境參數組合未發生變化,則不再需要與lmf網元進行頻繁交互,因此降低了定位的時間延遲。
17、在一種可能的實現方式中,prs中攜帶小區標識cell?id、參考信號接收功率rsrp和相對基站的到達角度aoa中的一項或者多項。
18、在一種可能的實現方式中,prs中攜帶小區標識cell?id,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數中的一項或多項,其中,空間區域編碼指示各cell?id對應的小區所處的網格區域,時間狀態參數用于指示定位時間,場景狀態參數為終端設備所處場景的標識;?網絡設備的狀態參數指示網絡設備的參數配置。
19、在一種可能的實現方式中,prs中攜帶小區標識cell?id,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用環境參數組合確定每個ai模型輸出的定位結果的權重,具體包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將cell?id的數量大于或等于第一閾值的交集對應的空間區域編碼作為第一篩選條件;根據作為第一篩選條件的各空間區域編碼對應的交集中的cell?id的數量,確定各ai模型的第一權重系數,第一權重系數與交集中的cell?id的數量正相關;根據時間間隔,確定各ai模型的第二權重系數,第二權重系數與時間間隔負相關;根據場景狀態參數確定各ai模型的第三權重系數;根據網絡設備的狀態參數確定各ai模型的第四權重系數;?根據各第一權重系數、各第二權重系數、各第三權重系數和各第四權重系數確定,確定各ai模型的權重系數;對各ai模型的權重系數進行歸一化處理,以獲取各ai模型的權重,各ai模型的權重的和為1。
20、在一種可能的實現方式中,prs中攜帶小區標識cell?id和rsrp,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用環境參數組合確定每個ai模型輸出的定位結果的權重,具體包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cellid;將滿足以下條件的交集對應的空間區域編碼作為第一篩選條件:rsrp大于或等于預設功率閾值的cell?id的數量大于第一閾值;根據作為第一篩選條件的各空間區域編碼對應的交集中的cell?id的數量,確定各ai模型的第一權重系數,第一權重系數與交集中的cellid的數量正相關;根據時間間隔,確定各ai模型的第二權重系數,第二權重系數與時間間隔負相關;根據場景狀態參數確定各ai模型的第三權重系數;根據網絡設備的狀態參數確定各ai模型的第四權重系數;?根據各第一權重系數、各第二權重系數、各第三權重系數和各第四權重系數確定,確定各ai模型的權重系數;對各ai模型的權重系數進行歸一化處理,以獲取各ai模型的權重,各ai模型的權重的和為1。
21、在一種可能的實現方式中,prs中攜帶小區標識cell?id,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用環境參數組合確定每個ai模型輸出的定位結果的權重,具體包括:定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將滿足以下條件的交集對應的空間區域編碼作為第一篩選條件:rsrp大于或等于預設功率閾值,且相對基站的aoa滿足預設角度范圍的cell?id的數量大于第一閾值;rsrp大于或等于預設功率閾值的cell?id的數量大于第一閾值;根據作為第一篩選條件的各空間區域編碼對應的交集中的cell?id的數量,確定各ai模型的第一權重系數,第一權重系數與交集中的cell?id的數量正相關;根據時間間隔,確定各ai模型的第二權重系數,第二權重系數與時間間隔負相關;根據場景狀態參數確定各ai模型的第三權重系數;根據網絡設備的狀態參數確定各ai模型的第四權重系數;?根據各第一權重系數、各第二權重系數、各第三權重系數和各第四權重系數確定,確定各ai模型的權重系數;對各ai模型的權重系數進行歸一化處理,以獲取各ai模型的權重,各ai模型的權重的和為1。
22、在一種可能的實現方式中,網絡設備的狀態參數指示網絡設備在不同時間段的參數配置,根據各第一權重系數、各第二權重系數、各第三權重系數和各第四權重系數確定,確定各ai模型的權重系數,包括:對于每個ai模型,執行以下步驟:對第一影響因子和第一權重系數的乘積、第一影響因子和第三權重系數的乘積、第二影響因子和第二權重系數的乘積、第二影響因子和第四權重系數的乘積進行求和,以確定每個ai模型的權重系數,其中第一影響因子大于第二影響因子。
23、在一種可能的實現方式中,利用prs、各ai模型以及各ai模型對應的權重,確定最終定位結果,包括:將prs作為各ai模型的輸入,以獲取各ai模型輸出的定位結果;將各ai模型輸出的定位結果與各ai模型對應的權重相乘后得到各ai模型對應的最終定位結果分量;將各ai模型對應的最終定位結果分量疊加后得到最終定位結果。
24、第三方面,本技術實施例中還提供了一種ai模型的定位方法,該方法可以應用于終端設備,包括:利用接收定位參考信號prs和環境參數組合,確定匹配的一個或多個ai模型索引,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;發送第一索引信息、prs以及環境參數組合,第一索引信息包括一個或多個ai模型索引;接收位置信息,位置信息包括最終定位結果,最終定位結果由prs、一個或多個ai模型、一個或多個ai模型中的每個ai模型對應的權重確定,每個ai模型對應一個或多個ai模型索引中的一個ai模型索引,權重為利用環境參數組合確定的每個ai模型輸出的定位結果的權重。
25、此實現方式中,由終端設備可以確定出一個或者多個用于定位的ai模型對應的ai模型索引,然后將所有的ai模型索引發送至lmf網元。lmf網元根據各個ai模型索引從ai模型庫中匹配出對應的ai模型并確定出各個ai模型對應的權重,然后lmf可以利用各個ai模型和對應的權重確定最終定位結果,并將最終定位結果發送至終端設備。現有方案中,當無法確定出與終端設備當前的環境參數組合完全匹配的ai模型時,會直接認為無法完成定位,而本技術方案可以利用多個與終端設備當前的環境參數匹配程度較高的ai模型進行定位,并根據權重進行定位結果的融合,進而獲取較為準確的最終定位結果。尤其適用于現實環境復雜多變的服務區域,或者用于定位的ai模型訓練不充分的區域,具有較高的實用性。
26、同時,對于終端設備側不需要進行連續定位的場景,例如進行單次定位或較少次數定位的場景,終端設備側可以直接獲取lmf網元發送的定位結果,該方式終端設備側不需要接收lmf網元發送的ai模型,可以減少數據的接收量,還降低了單次定位的時間延遲。
27、第四方面,本技術實施例中還提供了一種ai模型的定位方法,該方法可以應用于終端設備,包括:發送環境參數組合和定位參考信號prs,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;接收位置信息,位置信息包括最終定位結果,最終定位結果由prs、一個或多個ai模型、一個或多個ai模型中的每個ai模型對應的權重確定,權重為利用環境參數組合確定的每個ai模型輸出的定位結果的權重,每個ai模型對應一個ai模型索引,各ai模型索引利用環境參數組合和prs確定。
28、此實現方式中,由終端設備側將prs和環境參數組合發送至lme網元,lmf網元可以利用prs和環境參數組合確定出ai模型索引,lmf網元根據各個ai模型索引從ai模型庫中匹配出對應的ai模型并確定出各個ai模型對應的權重。然后lmf可以利用各個ai模型和對應的權重確定最終定位結果,并將最終定位結果發送至終端設備。現有的相關方案中,當無法確定出與終端設備當前的環境參數組合完全匹配的ai模型時,會直接認為無法完成定位,而本技術實施例提供的方案可以利用多個與終端設備當前的環境參數匹配程度較高的ai模型進行定位,并根據權重進行定位結果的融合,進而獲取較為準確的最終定位結果。尤其適用于現實環境復雜多變的服務區域,或者用于定位的ai模型訓練不充分的區域,具有較高的實用性。
29、同時,該方式lmf網元將ai模型發送至終端設備后,對于終端設備側需要進行連續定位的場景,終端設備側可以直接利用接收的ai模型進行定位,后續如果環境參數組合未發生變化,則不再需要與lmf網元進行頻繁交互,因此降低了定位的時間延遲。
30、第五方面,本技術實施例中還提供了一種ai模型的定位方法,該方法可以應用于網絡設備,網絡設備可以為lmf網元,該方法包括:接收第一索引信息,第一索引信息包括一個或多個ai模型索引,一個或多個ai模型索引利用接收定位參考信號prs和環境參數組合確定,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;發送與一個或多個ai模型索引中的每個ai模型索引分別對應的ai模型,各ai模型用于和prs以及各ai模型對應的權重共同確定最終定位結果,各ai模型對應的權重為利用環境參數組合確定的每個ai模型輸出的定位結果的權重。
31、此實現方式中,lmf網元根據各個ai模型索引從ai模型庫中匹配出對應的ai模型并確定出各個ai模型對應的權重,然后將匹配確定的一個或者多個ai模型發送至終端設備,由終端設備進行融合定位。適用于現實環境復雜多變的服務區域,或者用于定位的ai模型訓練不充分的區域,具有較高的實用性。
32、第六方面,本技術實施例中還提供了一種ai模型的定位方法,該方法可以應用于網絡設備,網絡設備可以為lmf網元,該方法包括:接收環境參數組合和定位參考信號prs,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;利用環境參數組合和prs,確定匹配的一個或多個ai模型索引;發送與一個或多個ai模型索引中的每個ai模型索引分別對應的ai模型,各ai模型用于和prs以及各ai模型對應的權重共同確定最終定位結果,各ai模型對應的權重為利用環境參數組合確定的每個ai模型輸出的定位結果的權重。
33、此實現方式中,由lmf網元確定一個或者多個ai模型索引,并根據各個ai模型索引從ai模型庫中匹配出對應的ai模型并確定出各個ai模型對應的權重,然后將匹配確定的一個或者多個ai模型發送至終端設備,由終端設備進行融合定位。適用于現實環境復雜多變的服務區域,或者用于定位的ai模型訓練不充分的區域,具有較高的實用性。
34、在一種可能的實現方式中,prs中攜帶小區標識cell?id、參考信號接收功率rsrp和相對基站的到達角度aoa中的一項或者多項。
35、在一種可能的實現方式中,prs中攜帶小區標識cell?id,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數中的一項或多項,其中,空間區域編碼指示各cell?id對應的小區所處的網格區域,時間狀態參數用于指示定位時間,場景狀態參數為終端設備所處場景的標識;?網絡設備的狀態參數指示網絡設備的參數配置。
36、在一種可能的實現方式中,prs中攜帶小區標識cell?id,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用環境參數組合和prs,確定匹配的一個或多個ai模型索引,具體包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將cell?id的數量大于或等于第一閾值的交集對應的空間區域編碼作為第一篩選條件;當定位時間與時間區間對應的基準值之間的時間間隔小于預設間隔時,將時間區間對應的時間狀態參數作為第二篩選條件,時間區間對應的基準值為時間區間的中間值;將所處場景狀態參數作為第三篩選條件;根據網絡設備的狀態參數確定第四篩選條件;根據第一篩選條件、第二篩選條件、第三篩選條件和第四篩選條件,以及環境參數組合與ai模型索引的映射表,確定匹配的一個或多個ai模型索引。
37、在一種可能的實現方式中,prs中攜帶小區標識cell?id和rsrp,終端設備的狀態參數包括空間區域編碼、時間狀態參數和場景狀態參數,利用環境參數組合和prs,確定匹配的一個或多個ai模型索引,具體包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cellid;將滿足以下條件的交集對應的空間區域編碼作為第一篩選條件:rsrp大于或等于預設功率閾值的cell?id的數量大于第一閾值;當定位時間與時間區間對應的基準值之間的時間間隔小于預設間隔時,將時間區間對應的時間狀態參數作為第二篩選條件,時間區間對應的基準值為時間區間的中間值;將所處場景狀態參數作為第三篩選條件;根據網絡設備的狀態參數確定第四篩選條件;根據第一篩選條件、第二篩選條件、第三篩選條件和第四篩選條件,以及環境參數組合與ai模型索引的映射表,確定匹配的一個或多個ai模型索引。
38、在一種可能的實現方式中,prs中攜帶小區標識cell?id、rsrp和相對基站的aoa,利用環境參數組合和prs,確定匹配的一個或多個ai模型索引,具體包括:確定第一cell?id列表,第一cell?id列表中包括所有prs中攜帶的cell?id;分別確定各空間區域編碼對應的第二cell?id列表與第一cell?id列表的交集,第二cell?id列表中包括空間區域編碼對應的網格區域內的所有小區的cell?id;將滿足以下條件的交集對應的空間區域編碼作為第一篩選條件:rsrp大于或等于預設功率閾值,且相對基站的aoa滿足預設角度范圍的cellid的數量大于第一閾值;當定位時間與時間區間對應的基準值之間的時間間隔小于預設間隔時,將時間區間對應的時間狀態參數作為第二篩選條件,時間區間對應的基準值為時間區間的中間值;將所處場景狀態參數作為第三篩選條件;根據網絡設備的狀態參數確定第四篩選條件;根據第一篩選條件、第二篩選條件、第三篩選條件和第四篩選條件,以及環境參數組合與ai模型索引的映射表,確定匹配的一個或多個ai模型索引。
39、第七方面,本技術實施例中還提供了一種ai模型的定位方法,該方法可以應用于網絡設備,網絡設備可以為lmf網元,該方法包括:接收第一索引信息、定位參考信號prs和環境參數組合,第一索引信息包括一個或多個ai模型索引,一個或多個ai模型索引利用prs和環境參數組合確定,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;確定與一個或多個ai模型索引中的每個ai模型索引分別對應的ai模型;利用環境參數組合確定每個ai模型輸出的定位結果的權重;利用prs、各ai模型以及各ai模型對應的權重,確定最終定位結果;發送位置信息,位置信息包括最終定位結果。
40、此實現方式中,lmf網元可以根據ai模型索引匹配得到ai模型,并確定出最終定位結果,直接將最終定位結果發送至終端設備。其中,lmf網元確定每個ai模型輸出的定位結果的權重,以及確定最終定位結果的具體實現方式可以參見以上第一方面所提供的實現方式。
41、第八方面,本技術實施例中還提供了一種ai模型的定位方法,該方法可以應用于網絡設備,網絡設備可以為lmf網元,該方法包括:接收環境參數組合和定位參考信號prs,環境參數組合中包括終端設備的狀態參數和網絡設備的狀態參數;利用環境參數組合和prs,確定匹配的一個或多個ai模型索引;確定與一個或多個ai模型索引中的每個ai模型索引分別對應的ai模型;利用環境參數組合確定每個ai模型輸出的定位結果的權重;利用prs、各ai模型以及各ai模型對應的權重,確定最終定位結果;發送位置信息,位置信息包括最終定位結果。
42、此實現方式中,lmf網元可以確定出ai模型索引,根據ai模型索引匹配得到ai模型,并確定出最終定位結果,直接將最終定位結果發送至終端設備。其中,lmf網元確定ai模型索引,確定每個ai模型輸出的定位結果的權重,以及確定最終定位結果的具體實現方式可以參見以上第一方面所提供的實現方式。
43、第九方面,本技術還提供了一種終端設備,該終端設備包括處理器和存儲器;處理器與存儲器耦合;存儲器用于存儲計算機程序和/或指令;處理器用于執行存儲器中存儲的計算機程序和/或指令,以實現如以上第一方面及第一方面的任意一種實現方式,或第二方面及第二方面的任意一種實現方式,或第三方面,或第四方面所提供的基于ai模型的定位方法。
44、第十方面,本技術還提供了一種通信裝置,包括處理器,所述處理器,用于執行存儲器中存儲的計算機程序或指令,以使得所述裝置執行以上第五方面,或第六方面及第六方面的任意一種實現方式,或第七方面,或第八方面所提供的基于ai模型的定位方法。
45、第十一方面,本技術還提供了一種計算機程序產品,計算機程序產品包括用于執行如以上第一方面及第一方面的任意一種實現方式,或第二方面及第二方面的任意一種實現方式,或第三方面,或第四方面所提供的基于ai模型的定位方法的計算機程序或指令;或者,用于執行以上第五方面,或第六方面及第六方面的任意一種實現方式,或第七方面,或第八方面所提供的基于ai模型的定位方法的計算機程序或指令。
46、第十二方面,本技術還提供了一種計算機可讀存儲介質,計算機可讀存儲介質上存儲有計算機程序或指令,當所述計算機程序或指令運行時,實現以上任意一方面或任意一方面的任意一種實現方式所提供的基于ai模型的定位方法。
- 還沒有人留言評論。精彩留言會獲得點贊!