投影儀的轉向控制方法及投影儀與流程
本發明涉及投影設備,尤其涉及一種投影儀的轉向控制方法及投影儀。
背景技術:
1、投影儀的使用越來越廣泛,使用場景也越加豐富,用戶在使用投影儀的過程中通常可能需要調節投影畫面的投影位置,這也使得包含支架的投影設備更加受到青睞,因為通過將投影設備的機體連接在可調節支架上,能夠方便地對投影畫面的投影位置及角度進行調節,然而現有技術中,當用戶需要調節投影畫面的投影位置及角度時,通常只能采用手動調節來達到所需要的位置或角度,使用起來非常不便。
技術實現思路
1、為解決上述技術問題,本發明提出一種投影儀的轉向控制方法及投影儀,只需通過遙控器指向想要投影的位置,即可使得投影儀自動跟隨轉動,使投影畫面投射到相應的指向位置。
2、為了達到上述目的,本發明采用以下技術方案:
3、第一方面,本發明公開了一種投影儀的轉向控制方法,包括以下步驟:
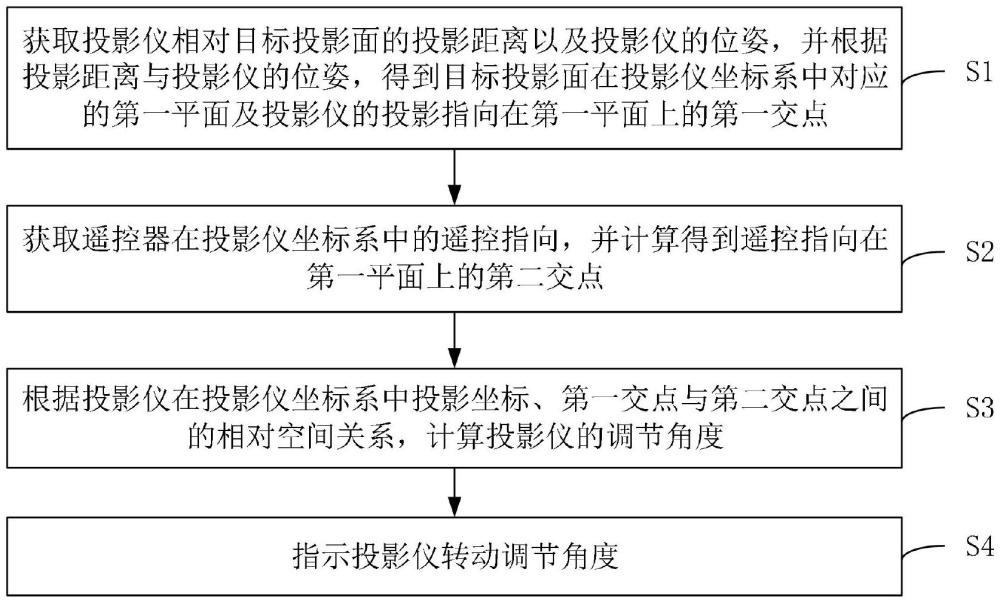
4、獲取投影儀相對目標投影面的投影距離以及所述投影儀的位姿,并根據所述投影距離與所述投影儀的位姿,得到所述目標投影面在投影儀坐標系中對應的第一平面及所述投影儀的投影指向在所述第一平面上的第一交點;
5、獲取遙控器在所述投影儀坐標系中的遙控指向,并計算得到所述遙控指向在所述第一平面上的第二交點;
6、根據所述投影儀在所述投影儀坐標系中投影坐標、所述第一交點與所述第二交點之間的相對空間關系,計算投影儀的調節角度;
7、指示所述投影儀轉動所述調節角度。
8、第二方面,本發明公開了一種投影儀的轉向控制方法,包括以下步驟:
9、獲取所述投影儀的位姿,并根據所述投影儀的位姿,得到所述投影儀的投影指向;
10、獲取遙控器在所述投影儀坐標系中的遙控指向;
11、根據所述投影儀的投影指向與所述遙控器在所述投影儀坐標系中的遙控指向之間的相對空間關系,計算投影儀的調節角度;
12、指示所述投影儀轉動所述調節角度。
13、針對第一方面的方案,優選地,所述根據所述投影距離與所述投影儀的位姿,得到所述目標投影面在投影儀坐標系中對應的第一平面包括:
14、獲取投影儀相對目標投影面的投影距離,根據所述投影距離及所述投影儀坐標系中預設的投影指向,確定所述投影指向在所述目標投影面上的第一交點;
15、獲取投影儀相對所述目標投影面的俯仰傾斜角及水平傾斜角,根據所述第一交點的坐標、所述俯仰傾斜角、所述水平傾斜角及三角關系,計算得到所述目標投影面在投影儀坐標系中對應的第一平面。
16、針對第一方面或第二方面的方案,優選地,所述投影儀中設有第一uwb天線,所述遙控器中設有第二uwb天線,所述獲取遙控器在所述投影儀坐標系中的遙控指向包括:
17、通過多個所述第一uwb天線分別獲取來自所述第二uwb天線的測距信號;
18、根據各所述第一uwb天線獲取的所述測距信號的差異,得到所述遙控器相對所述投影儀坐標系中的坐標及朝向。
19、更進一步地,所述投影儀中設有多個第一uwb天線,所述遙控器中設有多個第二uwb天線,至少三個所述第二uwb天線呈非直線排布,所述獲取遙控器在所述投影儀坐標系中的遙控指向包括:
20、通過多個所述第一uwb天線分別獲取來自各所述第二uwb天線的測距信號;
21、根據各所述第一uwb天線獲取的所述測距信號的差異及預設的天線排布關系,得到所述遙控器在所述投影儀坐標系中的遙控指向,所述天線排布關系包括所述遙控器的前端朝向與各所述第二uwb天線之間的空間關系。
22、針對第一方面或第二方面的方案,優選地,獲取遙控器在所述投影儀坐標系中的遙控指向包括:
23、獲取遙控器的位姿及所述遙控器相對所述投影儀的相對空間關系,根據所述遙控器的位姿、所述投影儀的位姿、所述遙控器相對所述投影儀的相對空間關系,得到所述投影儀坐標系與遙控器坐標系之間的轉換矩陣;
24、根據所述遙控器在所述遙控器坐標系中的預設指向及所述轉換矩陣,得到所述遙控器在所述投影儀坐標系中的遙控指向。
25、更進一步地,所述獲取遙控器的位姿及所述遙控器相對所述投影儀的相對空間關系,根據所述遙控器的位姿、所述投影儀的位姿、所述遙控器相對所述投影儀的相對空間關系,得到所述投影儀坐標系與遙控器坐標系之間的轉換矩陣包括:
26、獲取所述投影儀坐標系的原點到所述遙控器的遙控器坐標系的原點之間在所述投影儀坐標系中的第一向量,以及在所述遙控器坐標系中的第二向量;
27、根據所述投影儀坐標系中的第一重力向量與所述投影儀坐標系的坐標軸及坐標平面之間的夾角,得到投影儀第一旋轉矩陣,所述投影儀第一旋轉矩陣包括將所述投影儀坐標系中的z軸與所述第一重力向量重合的旋轉關系;
28、根據所述遙控器坐標系中的第二重力向量與所述遙控器坐標系的坐標軸及坐標平面之間的夾角,得到遙控器第一旋轉矩陣,所述遙控器第一旋轉矩陣包括將所述遙控器坐標系中的z軸與所述第二重力向量重合的旋轉關系;
29、根據所述第一向量和所述投影儀第一旋轉矩陣,得到第一旋轉向量,并根據所述第一旋轉向量與所述投影儀坐標系的坐標軸的夾角,得到投影儀第二旋轉矩陣;根據所述第二向量和所述投影儀第二旋轉矩陣,得到第二旋轉向量,并根據所述第二旋轉向量與所述遙控器坐標系的坐標軸的夾角,得到遙控器第二旋轉矩陣;
30、根據所述投影儀坐標系的原點到所述遙控器的遙控器坐標系的原點之間的距離,以及所述第一向量與所述投影儀坐標系各坐標軸之間的夾角,得到平移矩陣;
31、所述根據所述遙控器在所述遙控器坐標系中的預設指向及所述轉換矩陣,得到所述遙控器在所述投影儀坐標系中的遙控指向包括:
32、根據所述遙控器在所述遙控器坐標系中的預設指向與所述遙控器第一旋轉矩陣、所述遙控器第二旋轉矩陣、所述平移矩陣,以及與所述投影儀第一旋轉矩陣、所述投影儀第二旋轉矩陣的逆矩陣的運算,得到所述指定坐標軸映射在所述投影儀坐標系中的直線方程,所述直線方程表征所述遙控器在所述投影儀坐標系中的遙控指向。
33、更進一步地,所述投影儀和所述遙控器中均設有imu模塊,所述第一重力向量和所述第二重力向量由以下方式確定:
34、獲取所述投影儀中的imu模塊的第一姿態角數據,根據所述第一姿態角數據在所述投影儀坐標系中確定第一重力向量;
35、獲取所述遙控器中的imu模塊的第二姿態角數據,根據所述第二姿態角數據在所述遙控器坐標系中確定第二重力向量。
36、針對第一方面的方案,優選地,所述根據所述投影儀在所述投影儀坐標系中投影坐標、所述第一交點與所述第二交點之間的相對空間關系,計算投影儀的調節角度包括:
37、根據所述投影儀在所述投影儀坐標系中投影坐標至所述第一交點的第三向量,以及所述投影坐標至所述第二交點的第四向量,計算所述第三向量與所述第四向量之間的水平偏航夾角以及俯仰旋轉夾角;
38、所述指示所述投影儀轉動所述調節角度包括:
39、指示所述投影儀沿水平方向以所述水平偏航夾角旋轉,以及沿俯仰方向以所述俯仰旋轉夾角旋轉。
40、第三方面,本發明公開了一種投影儀,包括處理器和存儲器,所述存儲器中存儲有計算機程序,所述計算機程序能夠被所述處理器讀取以執行以實現如第一方面或第二方面所述的投影儀的轉向控制方法。
41、第四方面,本發明公開了一種存儲介質,所述存儲介質中存儲有計算機程序,其中,所述計算機程序被設置為可被一處理器運行以執第一方面或第二方面所述的投影儀的轉向控制方法。
42、與現有技術相比,本發明的有益效果在于:本發明提出的投影儀的轉向控制方法、投影儀及存儲介質,其中通過獲取投影指向在目標投影面上的第一交點和遙控指向在目標投影面上的第二交點,并根據兩個交點的相對空間關系,來計算投影儀的調節角度,并進一步指示投影儀轉動相應的調節角度,使得用戶可以不需操作電動云臺控制轉向,只需通過遙控器指向想要投影的位置,電動云臺即可自動跟隨轉動,使投影畫面投射到相應的指向位置,使用方便,且提高用戶體驗度。
43、在進一步的方案中,投影儀與遙控器各自內置uwb天線,通過無線信號測量兩者在空間的距離與夾角,實現遙控器指向目標投影面的具體方向與位置的感知,以能夠計算出投影儀坐標系中遙控器指向與目標投影面之間的第二交點的坐標,并進一步可以根據第二交點的坐標計算投影儀的調節角度,進而實現投影儀的自動轉向功能。
- 還沒有人留言評論。精彩留言會獲得點贊!