一種極坐標式機器視覺深度學習圖像采集儀及圖像處理算法的制作方法
本發明涉及一種極坐標式機器視覺深度學習圖像采集儀及圖像處理算法,具體地說是采用了電機帶動的旋轉平臺和電機帶動的沿弧面運動的ccd鏡頭而組成的一種機器視覺深度學習的圖像采集儀及其圖像處理算法,屬于深度學習的圖像采集設備領域。
背景技術:
1、深度學習(deep?learning)是機器學習領域中的一個重要分支,它基于人工神經網絡(artificial?neural?networks,?anns)的發展,特別是通過模仿人腦神經元之間的連接和通信方式來進行學習。深度學習通過構建由多個處理層組成的計算模型,來學習數據中的高級抽象表示。這些處理層可以是卷積層、池化層、全連接層、循環層等,它們通過非線性變換將數據從原始形式逐步轉換為更高層次的特征表示。在機器視覺的物體識別應用上,深度學習需要利用學習模型對多幅圖像數據(往往上千幅或幾千幅圖像)進行處理和分析,這需要拍攝大量的圖片,花費大量的人力。針對這種情況,廣大科研人員迫切需要一種能夠快速地、自動地對研究對象采集多幅圖像的儀器或設備,但目前缺少這種設備。
技術實現思路
1、針對缺少能夠對研究對象,快速地采集多幅照片缺少相應儀器的問題,本發明提供了一種極坐標式機器視覺深度學習圖像采集儀及圖像處理算法。
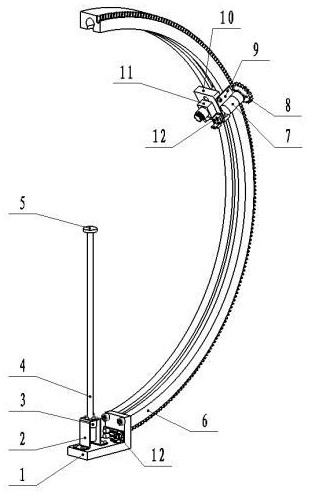
2、本發明是通過以下技術方案實現的:一種極坐標式機器視覺深度學習圖像采集儀,是由底臺、旋轉電機支架、旋轉臺電機、旋轉桿、旋轉平臺、弧形導軌、導軌電機、小傘齒輪、導軌電機支架、內部移動平臺、ccd鏡頭和控制線路板組成的,所述弧形導軌又由導軌體、矩形槽、圓形凹槽和傘齒輪弧組成的;所述弧形導軌的下端通過螺釘固定安裝在底臺上,旋轉臺電機的輸出軸與旋轉桿固定連接在一起,旋轉桿的頂端有一旋轉平臺,以放置被拍攝物;所述旋轉臺電機通過螺釘固定連接在旋轉臺電機支架上,旋轉臺電機支架固定連接在底臺上;所述內部移動平臺由移動載體、球輪軸和球輪組成,所述球輪有兩個,所述球輪軸有兩根,所述球輪安裝在球輪軸的一端,所述球輪軸的另一端固定安裝在移動載體的外側上;移動載體的內側安裝有ccd鏡頭和控制線路板;所述移動載體的一側安裝有導軌電機支架,導軌電機支架上通過螺釘固定連接著導軌電機,導軌電機的軸上固定連接有小傘齒輪;所述小傘齒輪與弧形導軌上的傘齒輪弧模數相同,且相嚙合;所述內部移動平臺上的兩個球輪嵌入在弧形導軌的圓形凹槽內;所述內部移動平臺在導軌電機的驅動下,能夠沿著弧形導軌的內側運動;所述底臺上還安裝有一控制線路板;兩控制線路板之間有導線連接;安裝在底臺上的控制線路板與旋轉臺電機連接有導線;安裝在內部移動平臺上的控制線路板與導軌電機之間有導線相連,所述球輪有一深孔,能夠固定安裝在所述球輪軸上。
3、進一步地,所述球輪軸為臺階軸,臺階軸的小徑處安裝有兩只軸承,所述軸承的外徑略小于所述球輪的孔徑;所述臺階軸小徑有一螺紋孔,所述球輪內有一通孔,通過該通孔,有一十字盤頭螺釘將球輪安裝在臺階軸上。
4、進一步地,所述極坐標式機器視覺深度學習圖像采集儀還有一背屏,該背屏的曲率與所述弧形導軌的內曲率相同,所述背屏通過支架固定連接在底臺上;所述背屏內表面能夠更換顏色,以方便拍攝圖像的處理。
5、所述旋轉平臺的旋轉桿長度可調,以使被拍攝物的中心位于弧形導軌的圓心處。
6、所述移動載體的外側具有弧度,該弧度與弧形導軌的內表面弧度相同。
7、所采用的軌道電機和旋轉臺電機可均選用相同型號的減速直流電機,所述控制線路板可設計同樣的線路板。
8、一種極坐標式機器視覺深度學習圖像處理算法,包括以下步驟:
9、步驟s1、圖像采集:初始化相機,并對相機的拍攝模式、對焦距離、曝光值、觸發源和存儲方式等進行設置;根據所設置的觸發源發送觸發信號給相機,啟動圖像采集;當采集儀完成全周運動后,結束圖像采集,并捕獲的圖像通過接口傳輸到計算機中;
10、步驟s2、二值化處理:讀取圖片,若拍攝背景為單色簡單背景,則采用全閾值法:根據所采集的物體選擇合適的全局閾值,如果灰度值大于全局閾值,則將灰度值改為maxval的值,否則將灰度值改為0;若拍攝背景為復雜背景,則采用自適應閾值法:閾值為像素周圍半徑內的像素均值減去常數,其中,半徑和常數的選取需根據實際圖像和處理需求通過實驗來確定,對于簡單或邊緣清晰的圖像,選擇較小的半徑,對于光復雜或噪聲多的圖像,選擇較大的半徑,常數為正數時,更多的像素被判定為前景,常數為負數時,更少的像素被判定為前景;
11、步驟s3、尋找邊界:采用opencv?庫進行輪廓檢測,輪廓檢索算法采用cv2.retr_external,該模式只獲取外部輪廓;輪廓逼近算法采用cv2.chain_approx_simple,該模式壓縮了水平、垂直和對角線的線段,只留下它們的端點,節省大量內存。
12、步驟s4、邊緣框選:初始化矩形坐標,遍歷點集,計算矩形尺寸,返回矩形信息,從而完成邊緣框選。
13、進一步的,步驟s2中,全閾值法采用以下公式:
14、?;
15、其中,scr為所處理的圖片閾值,thresh為全局閾值, maxval為大于全局閾值后設定的值,binary為處理后的圖片閾值,x為像素點的橫坐標,y為像素點的縱坐標;
16、自適應閾值法采用以下公式:
17、;
18、其中,r為所選半徑,c為所選常數,t(x,y)為處理后的圖片閾值,x為像素點的橫坐標,y為像素點的縱坐標;
19、進一步的,步驟s4中,遍歷點集過程為:逐個訪問點集中的每一個像素點(x,?y),如果x<xmin,則xmin?=?x;如果y<ymin,則ymin?=?y;如果x>xman,則xman?=?x;如果y>yman,則yman?=y;
20、其中,x為像素點的橫坐標,y為像素點的縱坐標,xmin為像素點的最小橫坐標,ymin為像素點的最小縱坐標,xmax為像素點的最大橫坐標,ymax為像素點的最大縱坐標;
21、進一步的,步驟s4中,計算矩形尺寸采用以下公式:
22、;
23、;
24、其中,w為矩形的寬度,h矩形的高度,xmin為像素點的最小橫坐標,ymin為像素點的最小縱坐標,xmax為像素點的最大橫坐標,ymax為像素點的最大縱坐標;
25、該發明的有益之處是,該圖像采集儀能夠實現在導軌電機和旋轉臺電機的轉動下,應用ccd鏡頭拍攝放置在旋轉平臺上的物體的全周照片。所述弧形導軌的上部留有開口,正好將內部移動平臺的球輪和球輪軸通過矩形槽和圓形凹槽嵌入進去,球輪無論轉動與否,均被限制在弧形導軌的圓形凹槽中,移動載體外弧面與弧形導軌的內弧面曲率相同,形成對內部移動平臺的運動限位;導軌電機上安裝的小齒輪和安裝在弧形導軌上的齒輪弧,都采用傘齒輪結構,保證了相互運動的滑順和齒輪的完好嚙合;背屏的設置,避免了拍攝照片背景的凌亂,極大地方面了拍攝照片的后期處理;背屏可更換性,方便了對深度學習建模的實物識別的訓練和識別率檢驗;圖像采集算法能夠實現圖像的自動采集與框選。
- 還沒有人留言評論。精彩留言會獲得點贊!