一種多攝相機的制作方法
本技術實施例涉及圖像技術,涉及但不限于一種多攝相機。
背景技術:
1、在現有技術中,常規的rgbd(彩色+深度)相機系統通常由多個獨立的組件構成,包括rgb相機、深度相機、串行器、解串器、電源模塊、驅動ic、激光器和金屬支架。但是,現有的rgbd相機通常占用較大的物理空間,不利于設備的小型化。為了解決這個問題,需要對rgbd相機的組件進行適當調整。
2、因此,如何對rgbd相機的組件進行調整,以節約設備成本以及實現設備的小型化,是一個亟待解決的問題。
技術實現思路
1、有鑒于此,本技術實施例提供的一種多攝相機,能夠針對rgbd相機的組件提出新的架構,用以實現節約設備成本以及實現設備的小型化的目的。本技術實施例提供的一種多攝相機是這樣實現的:
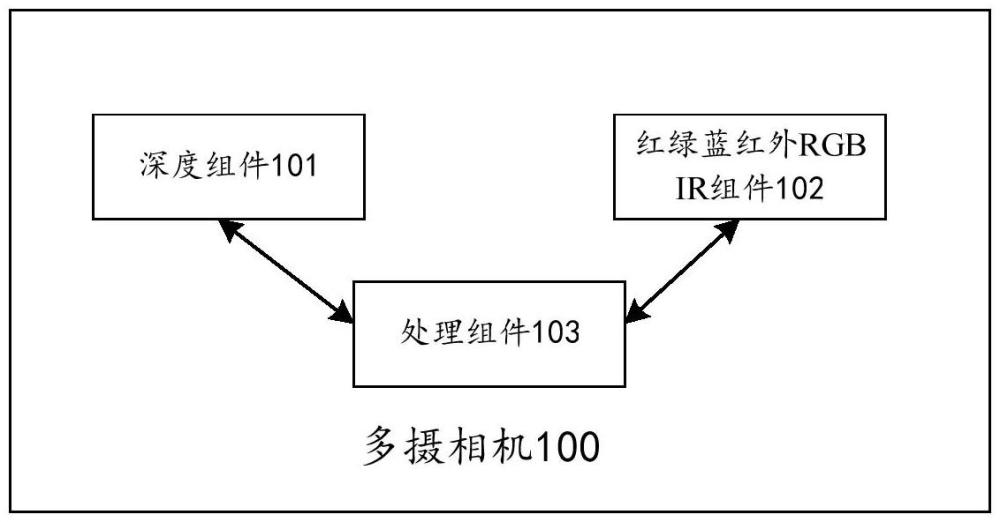
2、本技術實施例提供的一種多攝相機,包括:
3、深度組件101、紅綠藍紅外rgbir組件102以及處理組件103,所述處理組件103采用目標連接方式與所述深度組件101以及所述rgbir組件102連接,其中:
4、所述深度組件101,用于接收所述處理組件103發送的第一時序信號,根據所述第一時序信號采集深度圖像數據,以及,將所述深度圖像數據發送給所述處理組件103;
5、所述rgbir組件102,用于接收所述處理組件103發送的第二時序信號,根據所述第二時序信號采集rgbir相關圖像數據,以及,將所述rgbir相關圖像數據發送給所述處理組件103,所述rgbir相關圖像數據包括所述rgb圖像數據、ir圖像數據或rgbir圖像數據;
6、所述處理組件103,用于分別向所述深度組件101發送所述第一時序信號和向所述rgbir組件102發送所述第二時序信號,以及,接收所述深度組件101發送的所述深度圖像數據和所述rgbir組件102發送的rgbir相關圖像數據,并根據所述深度圖像數據和所述rgbir相關圖像數據,得到目標圖像;
7、其中,所述目標連接方式包括直連方式或者共用數據收發通道的方式,所述直連方式用于通過通信總線實現處理組件與深度組件和rgbir組件的連接,所述共用數據收發通道的方式用于所述深度組件和rgbir組件連接到處理組件時至少存在部分共用器件。
8、在一些實施例中,在所述目標連接方式為所述共用數據收發通道的方式的情況下,所述相機還包括串行器104和解串器105,所述深度組件101以及所述rgbir組件102分別與所述串行器104連接,所述解串器105分別與所述處理組件103和所述串行器104連接,其中:
9、所述串行器104,用于接收所述深度圖像數據和所述rgbir相關圖像數據,并將所述深度圖像數據和所述rgbir相關圖像數據組成串行數據發送給解串器105;
10、所述解串器105,用于對接收到的串行數據進行解串處理,得到所述深度圖像數據和所述rgbir相關圖像數據,并將所述深度圖像數據和所述rgbir相關圖像數據發送給所述處理組件103。
11、在一些實施例中,在所述目標連接方式為所述直連方式的情況下,所述處理組件103通過i2c通信總線以及mipi通信總線與所述深度組件101通信,以及所述處理組件103通過i2c通信總線以及mipi通信總線與所述rgbir組件102通信。
12、在一些實施例中,所述深度組件101以及所述rgbir組件102共用目標發光模塊106,其中:
13、所述深度組件101,用于根據所述第一時序信號,向所述目標發光模塊106發送第一曝光指令;
14、所述rgbir組件102,用于根據所述第二時序信號,向所述目標發光模塊106發送第二曝光指令;
15、所述目標發光模塊106,用于接收并根據所述第一曝光指令進行曝光處理,以使所述深度組件101采集所述深度圖像數據,及,接收并根據所述第二曝光指令進行曝光處理,以使所述rgbir組件102采集所述rgbir相關圖像數據。
16、在一些實施例中,所述第一曝光指令為用于測量深度信息的指令,所述第二曝光指令為用于補光的指令。
17、在一些實施例中,目標發光模塊106對應的發射視場角大于所述深度組件101以及所述rgbir組件102中任一相機組件的接收視場角。
18、在一些實施例中,所述深度組件101包括第一發光模塊,所述rgbir組件102包括第二發光模塊,其中:
19、所述第一發光模塊,用于接收并根據所述第一曝光指令進行曝光處理,以使所述深度組件101采集所述深度圖像數據;
20、所述第二發光模塊,用于接收并根據所述第二曝光指令進行曝光處理,以使所述rgbir組件102采集所述rgbir相關圖像數據。
21、在一些實施例中,所述第一發光模塊對應的發射視場角大于所述深度組件101的接收視場角,以及所述第二發光模塊對應的發射視場角大于所述rgbir組件102的接收視場角。
22、在一些實施例中,所述相機還包括慣性測量單元imu,所述imu通過所述i2c通信總線與所述處理組件103通信連接,其中:
23、所述imu,用于分別獲取所述深度組件101和所述rgbir組件102的數據輸出起始時刻以及數據輸出終止時刻,根據各個相機組件的數據輸出起始時刻和數據輸出終止時刻,生成補償數據,并將所述補償數據發送給所述處理組件103;
24、所述處理組件103根據所述深度圖像數據和所述rgbir相關圖像數據,得到目標圖像,包括:
25、所述處理組件103根據所述深度圖像數據、所述rgbir相關圖像數據以及所述補償數據進行融合處理,得到所述目標圖像;或,
26、所述處理組件103采用超分算法對所述深度圖像數據、所述rgbir相關圖像數據以及所述補償數據進行處理后,根據處理后的數據進行融合處理,得到所述目標圖像。
27、在一些實施例中,所述深度組件101以及所述rgbir組件102之間的間距小于或等于50mm。
28、本技術實施例所提供的一種多攝相機,包括:深度組件101、紅綠藍紅外rgbir組件102以及處理組件103,處理組件103采用目標連接方式與深度組件101以及rgbir組件102連接,其中:深度組件101,用于接收處理組件103發送的第一時序信號,根據第一時序信號采集深度圖像數據,以及,將深度圖像數據發送給處理組件103;rgbir組件102,用于接收處理組件103發送的第二時序信號,根據第二時序信號采集rgbir相關圖像數據,以及,將rgbir相關圖像數據發送給處理組件103,rgbir相關圖像數據包括rgb圖像數據、ir圖像數據或rgbir圖像數據;處理組件103,用于分別向深度組件101發送第一時序信號和向rgbir組件102發送第二時序信號,以及,接收深度組件101發送的深度圖像數據和rgbir組件102發送的rgbir相關圖像數據,并根據深度圖像數據和rgbir相關圖像數據,得到目標圖像;其中,目標連接方式包括直連方式或者共用數據收發通道的方式。通過對多攝相機的架構重新進行設計,這樣,改變了rgbd相機的組件結構,實現了組件的精簡,節約了設備成本以及實現了設備的小型化,解決背景技術中所提出的技術問題。
- 還沒有人留言評論。精彩留言會獲得點贊!