一種車路協同方法、裝置、系統以及電子設備與流程
本公開涉及通信,具體而言,涉及一種車路協同方法、裝置、系統以及電子設備。
背景技術:
1、車路協同是目前中國發展智能網聯交通的主攻方向。相對于單車智能,車路協同技術具備超視距感知的優勢,能更好地解決城市道路和高速公路的交通安全性和通行效率問題。
2、在車路協同場景中,v2v(vehicle-to-vehicle)和i2v(invisible-to-visible)通信所依賴的無線通信技術當前主要是基于蜂窩網絡的uu口通信方式。針對該uu口通信方式,由于車與車,車與路側單元之間的數據傳遞需要經過基站、核心網和云控平臺進行多次轉發,其時延會逐級累加。
技術實現思路
1、本公開實施例至少提供一種車路協同方法、裝置、系統以及電子設備。
2、第一方面,本公開實施例提供了一種車路協同方法,應用于邊緣計算平臺,包括:
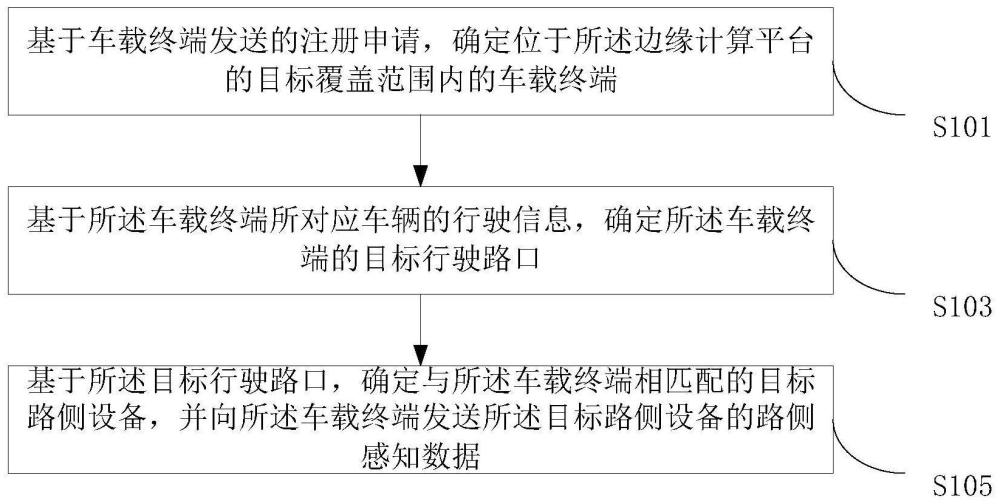
3、基于車載終端發送的注冊申請,確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端;其中,所述目標覆蓋范圍內包含多個路口,所述車載終端基于云控平臺發送的鄰近區域內邊緣計算平臺的覆蓋范圍確定發送所述注冊申請的邊緣計算平臺;
4、基于所述車載終端所對應車輛的行駛信息,確定所述車載終端的目標行駛路口;
5、基于所述目標行駛路口,確定與所述車載終端相匹配的目標路側設備,并向所述車載終端發送所述目標路側設備的路側感知數據。
6、一種可選的實施方式中,所述基于車載終端發送的注冊申請,確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端,包括:
7、接收車載終端發送的注冊申請;其中,所述注冊申請中攜帶所述車載終端的實時狀態數據;
8、將發送所述注冊申請的車載終端確定為所述車載終端。
9、一種可選的實施方式中,所述方法還包括:
10、在確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端之前,確定目標區域內所述邊緣計算平臺的管轄路口;
11、基于所述管轄路口,確定所述目標覆蓋范圍;
12、向云控平臺上報所述目標覆蓋范圍;其中,上報至所述云控平臺的所述目標覆蓋范圍用于車載終端確定發送注冊申請的邊緣計算平臺。
13、一種可選的實施方式中,在確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端之后,所述方法還包括:
14、確定所述車載終端的鄰近車載終端;其中,所述鄰近車載終端為所述目標覆蓋范圍內除所述車載終端之外預定半徑范圍內的車載終端;
15、向所述車載終端發送所述鄰近車載終端的設備地址信息;其中,所述設備地址信息包括ipv6地址和車輛的標識信息,所述ipv6地址用于向所述鄰近車載終端發送自身狀態數據。
16、一種可選的實施方式中,所述確定所述車載終端的鄰近車載終端,包括:
17、通過所述邊緣計算平臺中的gpu,確定每個候選車載終端和所述車載終端之間的距離;
18、基于所述距離確定所述車載終端的鄰近車載終端。
19、一種可選的實施方式中,在確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端之后,所述方法還包括:
20、基于所述目標覆蓋范圍內各路側設備的路側感知數據,以及各車載終端的狀態數據,為預警車載終端確定滿足距離要求的交通參與對象;其中,所述預警車載終端為所述目標覆蓋范圍內滿足預警要求的車載終端;
21、確定所述交通參與對象和所述預警車載終端之間的碰撞時間;
22、基于所述碰撞時間確定所述預警車載終端的威脅目標;
23、基于所述威脅目標向所述預警車載終端發送預警信息。
24、一種可選的實施方式中,所述基于所述碰撞時間確定所述預警車載終端的威脅目標,包括:
25、確定所述交通參與對象中是否存在所述碰撞時間小于預設時間閾值的交通參與對象;
26、在確定出存在的情況下,確定最小碰撞時間所對應目標交通參與對象;
27、基于所述目標交通參與對象確定所述威脅目標。
28、第二方面,本公開實施例提供了一種車路協同方法,應用于車載終端,包括:
29、獲取云控平臺發送的鄰近區域內邊緣計算平臺的覆蓋范圍;
30、基于所述車載終端的實時位置,在所述覆蓋范圍中確定所述車載終端所處目標覆蓋范圍,并向所述目標覆蓋范圍對應的邊緣計算平臺發送注冊申請;所述目標覆蓋范圍內包含多個路口;
31、在所述注冊申請通過的情況下,獲取所述邊緣計算平臺發送的目標路側設備的路側感知數據;其中,所述目標路側設備為與該車載終端的目標行駛路口相匹配的路側設備。
32、一種可選的實施方式中,所述獲取云控平臺發送的鄰近區域內邊緣計算平臺的覆蓋范圍,包括:
33、向所述云控平臺發送自身的實時位置和范圍索引信息;其中,所述范圍索引信息用于指示所述車載終端已存儲的覆蓋范圍;
34、獲取所述云控平臺基于所述實時位置和所述范圍索引信息,確定的所述鄰近區域內邊緣計算平臺的覆蓋范圍;其中,所述鄰近區域內邊緣計算平臺的覆蓋范圍中不包含所述已存儲的覆蓋范圍。
35、一種可選的實施方式中,所述方法還包括:
36、獲取所述邊緣計算平臺發送的鄰近車載終端的設備地址信息;
37、基于所述設備地址信息向所述鄰近車載終端發送自身狀態數據。
38、一種可選的實施方式中,所述向所述鄰近車載終端發送自身狀態數據,包括:
39、在所述鄰近車載終端中確定與當前車載終端之間存在碰撞風險的風險車載終端;
40、確定所述風險車載終端和所述當前車載終端之間的最小安全距離;
41、確定所述風險車載終端和所述當前車載終端之間的實際距離;
42、基于所述最小安全距離和所述實際距離之間的距離關系,確定與所述風險車載終端相對應的發射頻率;
43、按照所述發射頻率向所述風險車載終端發送自身狀態數據。
44、一種可選的實施方式中,所述在所述鄰近車載終端中確定與當前車載終端之間存在碰撞風險的風險車載終端,包括:
45、確定所述當前車載終端的風險檢測區域;
46、確定位于所述風險檢測區域中的目標鄰近車載終端;
47、確定所述目標鄰近車載終端和所述當前車載終端間的相對運動速度;
48、在確定所述相對運動速度滿足速度變化要求的情況下,確定所述目標鄰近車載終端為所述風險車載終端。
49、第三方面,本公開實施例提供了一種車路協同系統,包括:云控平臺、車載終端和邊緣計算平臺;
50、所述云控平臺,被配置成獲取各邊緣計算平臺發送的覆蓋范圍,并向所述車載終端發送鄰近區域內邊緣計算平臺的覆蓋范圍;
51、所述車載終端,被配置成獲取所述云控平臺發送的鄰近區域內邊緣計算平臺的覆蓋范圍;并基于所述車載終端的實時位置,在所述覆蓋范圍中確定所述車載終端所處目標覆蓋范圍,并向所述目標覆蓋范圍對應的邊緣計算平臺發送注冊申請;所述目標覆蓋范圍內包含多個路口;以及在所述注冊申請通過的情況下,獲取所述邊緣計算平臺發送的目標路側設備的路側感知數據;其中,所述目標路側設備為與該車載終端的目標行駛路口相匹配的路側設備;
52、所述邊緣計算平臺,被配置成基于車載終端發送的注冊申請,確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端;基于所述車載終端所對應車輛的行駛信息,確定所述車載終端的目標行駛路口;基于所述目標行駛路口,確定與所述車載終端相匹配的目標路側設備,并向所述車載終端發送所述目標路側設備的路側感知數據。
53、第四方面,本公開實施例提供了一種路徑生成裝置,包括:
54、第一確定單元,用于基于車載終端發送的注冊申請,確定位于所述邊緣計算平臺的目標覆蓋范圍內的車載終端;其中,所述目標覆蓋范圍內包含多個路口,所述車載終端基于云控平臺發送的鄰近區域內邊緣計算平臺的覆蓋范圍確定發送所述注冊申請的邊緣計算平臺;
55、第二確定單元,用于基于所述車載終端所對應車輛的行駛信息,確定所述車載終端的目標行駛路口;
56、第三確定單元,用于基于所述目標行駛路口,確定與所述車載終端相匹配的目標路側設備,并向所述車載終端發送所述目標路側設備的路側感知數據。
57、第五方面,本公開實施例提供了一種路徑生成裝置,包括:
58、第一獲取單元,用于獲取云控平臺發送的鄰近區域內邊緣計算平臺的覆蓋范圍;
59、第四確定單元,用于基于所述車載終端的實時位置,在所述覆蓋范圍中確定所述車載終端所處目標覆蓋范圍,并向所述目標覆蓋范圍對應的邊緣計算平臺發送注冊申請;所述目標覆蓋范圍內包含多個路口;
60、第二獲取單元,用于在所述注冊申請通過的情況下,獲取所述邊緣計算平臺發送的目標路側設備的路側感知數據;其中,所述目標路側設備為與該車載終端的目標行駛路口相匹配的路側設備。
61、第六方面,本公開實施例還提供一種電子設備,包括:處理器、存儲器和總線,所述存儲器存儲有所述處理器可執行的機器可讀指令,當電子設備運行時,所述處理器與所述存儲器之間通過總線通信,所述機器可讀指令被所述處理器執行時執行上述第一方面,或第一方面中任一種可能的實施方式中的步驟。
62、第七方面,本公開實施例還提供一種計算機可讀存儲介質,該計算機可讀存儲介質上存儲有計算機程序,該計算機程序被處理器運行時執行上述第一方面,或第一方面中任一種可能的實施方式中的步驟。
63、為使本公開的上述目的、特征和優點能更明顯易懂,下文特舉較佳實施例,并配合所附附圖,作詳細說明如下。
- 還沒有人留言評論。精彩留言會獲得點贊!