宏蜂窩站址確定方法、裝置、電子設備及程序產品與流程
本發明涉及通信,尤其涉及一種宏蜂窩站址確定方法、裝置、電子設備及程序產品。
背景技術:
1、現有的宏蜂窩站址規劃方法,通常是在進行地圖柵格化的弱覆蓋分析后,篩選出弱覆蓋區域,針對弱覆蓋區域的面積人工進行站點位置及數量的規劃。或者通過傳統的聚類或遍歷算法,根據弱覆蓋區域進行站址規劃。
2、例如,公開號為cn108124267a公開的《基站自動規劃方法及裝置》的技術方案中,基于待規劃區域的柵格化覆蓋的評估結果,利用柵格爬蟲算法確定待規劃區域內的弱覆蓋區域,將弱覆蓋區域的幾何中心點作為基站規劃點。在公開號為cn106804042a公開的《站點規劃方法》的技術方案中,是將地圖進行柵格化處理;將覆蓋數據映射到柵格之中,確定弱覆蓋的柵格;通過聚類算法,識別出聚集的弱覆蓋區域。針對弱覆蓋的問題區域;計算弱覆蓋的問題區域里的每個柵格與網內站點的距離,篩選出問題區域內與網內站點最小距離在閾值范圍內的柵格,列入備選規劃點,有備選規劃點的弱覆蓋問題區域將保留,其他則被刪除。公開號為cn109429234a公開的《一種基站的部署方法及裝置》的技術方案中,根據弱覆蓋區域的類型、預設的弱覆蓋區域的類型和基站類型的對應關系,以及部署參數,對弱覆蓋區域進行基站部署。
3、而對于宏蜂窩的站址規劃,需要考慮覆蓋盡可能多的弱覆蓋區域,但由于一些離散分布的弱覆蓋點的存在,在站址規劃時為了實現對這些離散弱覆蓋點的覆蓋,規劃的站址或多或少會向離散弱覆蓋點偏離,無法有效規避離散的弱覆蓋點對站址規劃結果的影響,進而難以實現站址資源投入的最大價值。
技術實現思路
1、本發明提供一種宏蜂窩站址確定方法、裝置、電子設備及程序產品,用以解決現有技術中在進行宏蜂窩站址規劃時,沒有篩選掉離散弱覆蓋點,從而難以實現站址資源投入的最大價值的缺陷。
2、本發明提供一種宏蜂窩站址確定方法,包括:
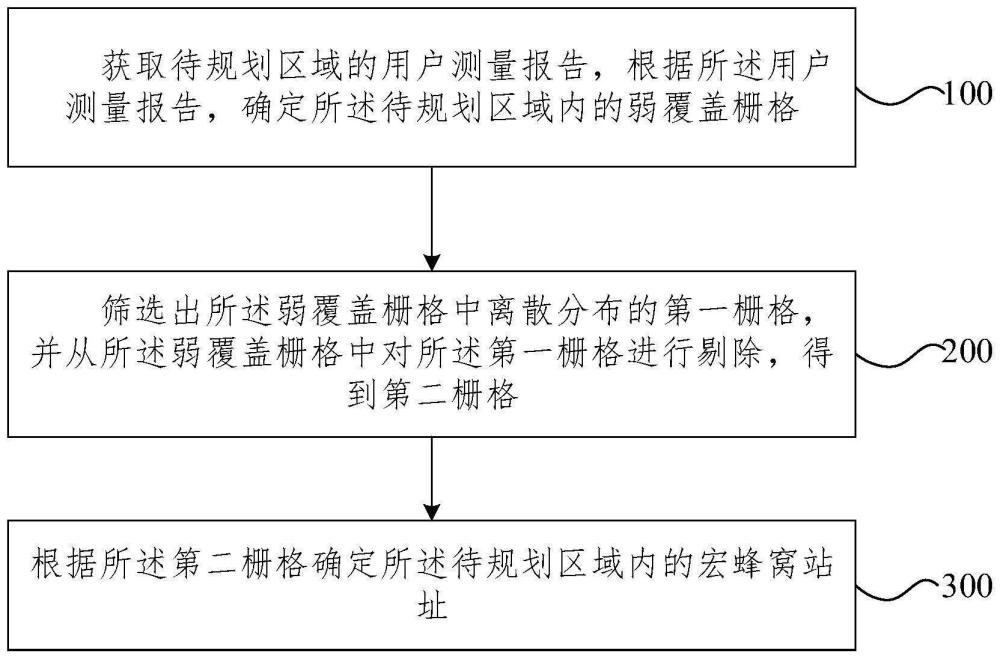
3、獲取待規劃區域的用戶測量報告,根據所述用戶測量報告,確定所述待規劃區域內的弱覆蓋柵格;
4、篩選出所述弱覆蓋柵格中離散分布的第一柵格,并從所述弱覆蓋柵格中對所述第一柵格進行剔除,得到第二柵格;
5、根據所述第二柵格確定所述待規劃區域內的宏蜂窩站址。
6、根據本發明提供的宏蜂窩站址確定方法,所述根據所述第二柵格確定所述待規劃區域內的宏蜂窩站址,包括:
7、根據所述待規劃區域的柵格尺寸確定大柵格尺寸,并根據所述大柵格尺寸將所述待規劃區域劃分為多個大柵格;
8、遍歷所述多個大柵格,確定所述多個大柵格中存在所述第二柵格的目標柵格;
9、對于每個所述目標柵格,獲取所述目標柵格周圍預設數量的相鄰柵格;
10、根據目標柵格中的所述第二柵格,以及各所述相鄰柵格中的所述第二柵格,確定所述目標柵格在所述待規劃區域中對應的宏蜂窩站址。
11、根據本發明提供的宏蜂窩站址確定方法,所述根據目標柵格中的所述第二柵格,以及各所述相鄰柵格中的所述第二柵格,確定所述目標柵格在所述待規劃區域中對應的宏蜂窩站址,包括:
12、根據所述目標柵格中的所述第二柵格,生成第一柵格集合;所述第一柵格集合中包括所述目標柵格中各所述第二柵格在所述待規劃區域中的坐標;
13、基于所述第一柵格集合中的各所述第二柵格的坐標,計算所述目標柵格對應的重心坐標;
14、根據各所述相鄰柵格中的所述第二柵格,生成第二柵格集合;所述第二柵格集合中包括所述相鄰柵格中各所述第二柵格在所述待規劃區域中的坐標;
15、利用所述第二柵格集合對所述第一柵格集合進行更新,以更新所述目標柵格對應的重心坐標;
16、根據更新后的重心坐標,確定所述目標柵格在所述待規劃區域中對應的宏蜂窩站址。
17、根據本發明提供的宏蜂窩站址確定方法,所述利用所述第二柵格集合對所述第一柵格集合進行更新,以更新所述目標柵格對應的重心坐標,包括:
18、計算所述第二柵格集合中各所述第二柵格與所述重心坐標之間的第一目標距離;
19、按照所述第一目標距離從小到大的順序,對所述第二柵格集合中的各所述第二柵格進行排序,按照排序順序從所述第二柵格集合中選取一所述第二柵格作為目標小柵格;
20、將所述目標小柵格的坐標添加到所述第一柵格集合中,對所述第一柵格集合進行更新;
21、返回并執行所述基于所述第一柵格集合中的各所述第二柵格的坐標,計算所述目標柵格對應的重心坐標的步驟,以對所述重心坐標進行更新;
22、確定更新后的重心坐標與所述第一柵格集合中的各所述第二柵格的坐標之間的第二目標距離;
23、若所述第二目標距離小于或等于所述目標柵格在所述待規劃區域中對應的宏蜂窩的預估覆蓋半徑,根據預設的第三標識對所述目標小柵格進行標識;
24、返回并執行所述按照排序順序從所述第二柵格集合中選取一所述第二柵格作為目標小柵格的步驟,直到所述第二目標距離大于所述目標柵格在所述待規劃區域中對應的宏蜂窩的預估覆蓋半徑時,將所述目標小柵格的坐標從所述第一柵格集合中剔除。
25、根據本發明提供的宏蜂窩站址確定方法,所述篩選出所述弱覆蓋柵格中離散分布的第一柵格,包括:
26、獲取所述待規劃區域的柵格尺寸,根據所述柵格尺寸確定滑動窗口的窗口尺寸和滑動步長;
27、基于所述窗口尺寸和所述滑動步長,對所述待規劃區域內的柵格進行滑窗處理,并計算滑窗處理時的滑動窗口內的弱覆蓋柵格比例;
28、若所述弱覆蓋柵格比例大于預設的比例閾值,利用預設的第一標識對所述滑動窗口內的弱覆蓋柵格進行標識;
29、若所述弱覆蓋柵格比例小于或等于預設的比例閾值,利用預設的第二標識對所述滑動窗口內的弱覆蓋柵格進行標識;
30、根據所述第一標識和所述第二標識,篩選出所述弱覆蓋柵格中離散分布的第一柵格。
31、根據本發明提供的宏蜂窩站址確定方法,所述滑動窗口是由l×l個柵格組成的矩形區域,其中,r是所述待規劃區域的宏蜂窩的預估覆蓋半徑,a是所述待規劃區域的柵格尺寸;所述滑動步長為a。
32、根據本發明提供的宏蜂窩站址確定方法,所述基于所述窗口尺寸和所述滑動步長,對所述待規劃區域內的柵格進行滑窗處理,并計算滑窗處理時的滑動窗口內的弱覆蓋柵格比例,包括:
33、從所述待規劃區域中確定起始柵格;
34、基于所述窗口尺寸和所述滑動步長,以所述起始柵格作為起點,對所述待規劃區域在第一方向上的柵格進行滑窗處理,并獲取滑窗處理時的滑動窗口內的弱覆蓋柵格的數量;
35、計算所述滑動窗口內的弱覆蓋柵格的數量在所述滑動窗口內的柵格數量中所占的比例,得到所述滑動窗口內的弱覆蓋柵格比例;
36、在所述滑動窗口滑動至所述待規劃區域在所述第一方向上對應的第一邊緣側時,基于所述滑動步長,在所述待規劃區域的第二方向上對所述起始柵格進行滑動,返回并執行所述以所述起始柵格作為起點,對所述待規劃區域在第一方向上的柵格進行滑窗處理的步驟,直到所述滑動窗口滑動至所述待規劃區域在所述第二方向上對應的第二邊緣側為止;所述第二方向垂直于所述第一方向。
37、本發明還提供一種宏蜂窩站址確定裝置,包括:
38、采集模塊,用于獲取待規劃區域的用戶測量報告,根據所述用戶測量報告,確定所述待規劃區域內的弱覆蓋柵格;
39、篩選模塊,用于篩選出所述弱覆蓋柵格中離散分布的第一柵格,并從所述弱覆蓋柵格中對所述第一柵格進行剔除,得到第二柵格;
40、規劃模塊,用于根據所述第二柵格確定所述待規劃區域內的宏蜂窩站址。
41、本發明還提供一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現如上述任一種所述宏蜂窩站址確定方法。
42、本發明還提供一種非暫態計算機可讀存儲介質,其上存儲有計算機程序,該計算機程序被處理器執行時實現如上述任一種所述宏蜂窩站址確定方法。
43、本發明還提供一種計算機程序產品,包括計算機程序,所述計算機程序被處理器執行時實現如上述任一種所述宏蜂窩站址確定方法。
44、本發明提供的宏蜂窩站址確定方法、裝置、電子設備及程序產品,通過通過待規劃區域的用戶測量報告確定待規劃區域內的弱覆蓋柵格;篩選出離散分布的弱覆蓋柵格中離散分布并剔除,根據剔除離散分布的弱覆蓋柵格后剩余的弱覆蓋柵格確定待規劃區域內的宏蜂窩站址。通過篩選并剔除掉離散的弱覆蓋柵格后進行宏蜂窩的站址規劃,從而可以規避離散弱覆蓋點對宏蜂窩站址規劃結果的影響,使得宏蜂窩可以覆蓋盡可能多的弱覆蓋區域,實現站址資源投入的最大價值。
- 還沒有人留言評論。精彩留言會獲得點贊!