水下裝備無線充電耦合器、充電系統及最大效率控制方法
本發明屬于水下充電,具體涉及水下裝備無線充電耦合器、充電系統及最大效率控制方法。
背景技術:
1、自主式水下航行器作為一種重要的海上力量,是進行海洋地質地貌勘探、海洋環境觀測、海洋資源勘探等工作的重要工具;但受自主式水下航行器自身體積和負載能力限制,所搭載的電池容量有限,續航問題一直限制了自主式水下航行器的進一步發展。無線充電技術由于其方便且具備一定的傳輸效率的特點,廣泛應用于水下塢站的充電系統中。
2、由于水流的影響,水下航行器與水下充電裝置對接并不能完全按照設計的理想情況實現;因此,磁耦合器并不能完全對準,由于磁耦合器產生的感應鏈路影響著無線充電的充電功率和充電效率,那么如何在水下航行器對接不十分精確的情況下設計磁耦合器以保證無線充電的功率和效率是需要解決的問題。
3、中國專利申請cn117275913a、中國專利cn109192473b和cn210608704u中提供的磁耦合器,在一些方面雖然降低了磁耦合器對接不準對無線充電系統的影響。然而,前者需要在航行器端增加較重的耦合器結構,降低了航行器的帶載能力;后兩者在航行器端的磁耦合器結構復雜且只能降低航行器橫滾對磁耦合器對不準的影響。
4、鑒于此,本發明研究團隊認為有必要對耦合器結構進行進一步地優化。
技術實現思路
1、本發明的目的在于解決現有水下航行器無線充電系統需在航行器端搭載較重或較復雜的耦合器,影響水下航行器帶載能力,以及在水下航行器對接不十分精準的情況下存在影響無線充電功率和效率的問題,為此提供水下裝備無線充電耦合器、充電系統及最大效率控制方法,旨在不增加水下航行器端磁耦合器復雜程度的同時,能在橫滾和軸向躥動方向上降低對水下航行器對接精度的要求,實現水下航行器對心不準確下的高效能源補給。
2、為實現上述目的,本發明所提供的技術解決方案是:
3、水下裝備無線充電磁耦合器,其特殊之處在于:包括適配安裝在水下裝備上的次級側磁耦合模塊和適配安裝在水下充電裝置上的初級側磁耦合模塊;
4、所述次級側磁耦合模塊包括第一金屬屏蔽本體、第一導磁層和第一線圈;所述第一金屬屏蔽本體為圓弧面結構,第一線圈通過第一導磁層安裝在第一金屬屏蔽本體的凸面上,且第一線圈為獨立耦合線圈,也稱次級側線圈;
5、所述初級側磁耦合模塊包括第二金屬屏蔽本體、第二導磁層和第二線圈;所述第二金屬屏蔽本體為圓弧面結構,第二線圈通過第二導磁層安裝在第二金屬屏蔽本體的凹面上,且第二線圈為由m×n個耦合線圈組成的m×n線圈陣列,其中,m和n均不小于3,也稱初級側線圈陣列;
6、其中,所述耦合線圈與所述第一線圈的尺寸相同;這里主要指面積相同,因此,水下裝備(比如:水下航行器)只需要航行進入初級側線圈陣列的區域中,即可實現無線能源補給,體現了本發明中無線充電耦合器的寬工作區域性;由于初級側線圈陣列同時在軸向和徑向上擴大了耦合器的磁場范圍,因此該結構在保證水下裝備端次級側磁耦合模塊簡單輕便的條件下,能同時在橫滾和軸向躥動多個方向上降低磁耦合器對心的要求,實現在對接不精確時的能量補給;
7、當次級側磁耦合模塊與初級側磁耦合模塊對接后,第一金屬屏蔽本體與第二金屬屏蔽本體同心設置,且第一線圈能夠與第二線圈的任意一處適配對接。
8、進一步地,所述第一導磁層包括多個導磁磁芯,多個導磁磁芯自第一金屬屏蔽本體的一端至另一端均勻間隔鋪設在第一金屬屏蔽本體上;
9、所述第二導磁層包括多個導磁磁芯,多個導磁磁芯以陣列的形式鋪設在第二金屬屏蔽本體上。
10、進一步地,所述第一金屬屏蔽本體凸面的中部設置有安裝凹槽,邊緣設置有多個安裝孔;第一導磁層鋪設在所述安裝凹槽內;
11、所述第二金屬屏蔽本體凹面設置有金屬屏蔽框架,邊緣設置有多個安裝孔;金屬屏蔽框架圍合的內部區域內鋪設所述第二導磁層。
12、進一步地,所述第一線圈為與第一金屬屏蔽本體凸面隨形設計的曲面盤式線圈;
13、所述第二線圈中的各個耦合線圈均為與第二金屬屏蔽本體凹面隨形設計的曲面盤式線圈。
14、進一步地,上述導磁層的導磁材料可選用鐵氧體。
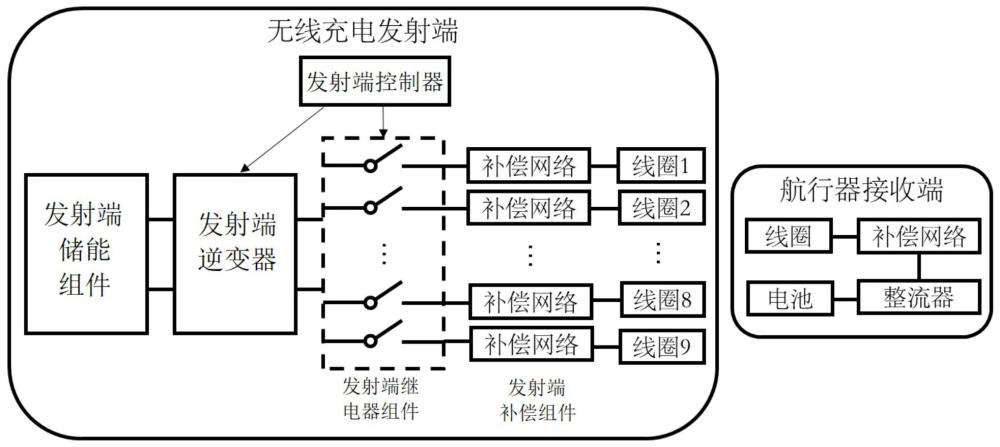
15、本發明還提供了水下裝備無線充電系統,其特殊之處在于:包括發射單元、接收單元、以及上述水下裝備無線充電耦合器;
16、所述發射單元包括發射端儲能組件、發射端控制器、發射端逆變器、發射端繼電器組件以及發射端補償組件;其中,發射端繼電器組件為可控繼電器陣列,包括m×n個繼電器;發射端補償組件包括m×n個補償網絡;
17、所述發射端儲能組件通過發射端逆變器與各個繼電器電性連接,m×n個繼電器通過m×n個補償網絡與第二線圈中的m×n個耦合線圈電性連接,形成m×n個線圈回路;其中,一個繼電器對應一個補償網絡和一個耦合線圈;
18、所述發射端控制器與發射端逆變器和發射端繼電器組件電性連接,控制各個線圈回路的通斷;
19、所述接收單元包括接收端儲能組件、接收端整流器以及接收端補償網絡;
20、所述接收端儲能組件依次通過接收端整流器和接收端補償網絡與第一線圈電性連接。
21、然而,當無線充電系統在海洋環境下使用時,海水電導率遠大于空氣電導率,線圈中的高頻交變電流會在海水中產生交變電磁場,進而產生渦流損耗,為了避免所有耦合線圈同時開啟造成的能量損耗,本發明還提出了基于二分法的初級側最大效率控制方法,也可稱最大效率跟蹤方法,將m×n線圈陣列按照該方法依次通電,直至找到無線充電系統的最大效率傳輸點,即上述水下裝備無線充電系統的最大效率控制方法,其特殊之處在于,包括以下步驟:
22、步驟1:當初級側磁耦合模塊與次級側磁耦合模塊對接后,將第二線圈陣列對角線作為第一二分分割線對m×n線圈陣列進行劃分,將m×n線圈陣列劃分為處于第一二分分割線上的區域以及處于第一二分分割線兩側的區域mn/2-top和區域mn/2-bot;
23、步驟2:通過發射端控制器控制發射端繼電器組件中各個繼電器,接通位于區域mn/2-top內以及第一二分分割線上的耦合線圈,斷開位于區域mn/2-bot內的耦合線圈,記錄此時的發射端輸入功率pin-mn/2-top;
24、通過發射端控制器控制發射端繼電器組件中各個繼電器,接通位于區域mn/2-bot內以及第一二分分割線上的耦合線圈,斷開位于區域mn/2-top內的耦合線圈,記錄此時的發射端輸入功率pin-mn/2-bot;
25、比較pin-mn/2-top和pin-mn/2-bot:
26、若pin-mn/2-top=pin-mn/2-bot,則說明此次對接中,作為次級側線圈的第一線圈落在了第一二分分割線上的區域內;
27、若pin-mn/2-top<pin-mn/2-bot,則說明此次對接中,作為次級側線圈的第一線圈落在了區域mn/2-top內;
28、若pin-mn/2-top>pin-mn/2-bot,則說明此次對接中,作為次級側線圈的第一線圈落在了區域mn/2-?bot內;
29、步驟3:對步驟2判斷出來的線圈區域,繼續用第二二分分割線進行劃分,分為處于第二二分分割線上的區域以及處于第二二分分割線兩側的區域mn/4-top和區域mn/4-bot;
30、通過發射端控制器控制發射端繼電器組件中各個繼電器,接通位于區域mn/4-top內以及第二二分分割線上的耦合線圈,斷開位于區域mn/4-bot內的耦合線圈,記錄此時的發射端輸入功率pin-mn/4-top;
31、通過發射端控制器控制發射端繼電器組件中各個繼電器,接通位于區域mn/4-bot內以及第二二分分割線上的耦合線圈,斷開位于區域mn/4-top內的耦合線圈,記錄此時的發射端輸入功率pin-mn/4-bot;
32、比較pin-mn/4-top和pin-mn/4-bot:
33、若pin-mn/4-top=pin-mn/4-bot,則說明此次對接中,作為次級側線圈的第一線圈落在了第二二分分割線上的區域內;
34、若pin-mn/4-top<pin-mn/4-bot,則說明此次對接中,作為次級側線圈的第一線圈落在了區域mn/4-top內;
35、若pin-mn/4-top>pin-mn/4-bot,則說明此次對接中,作為次級側線圈的第一線圈落在了區域mn/4-?bot內;
36、以此類推,繼續進行二分,直至m×n/n<2,其中n=2k,k為二分次數;
37、步驟4:只接通m×n線圈陣列中在第k-1次二分后判斷得出的區域內的耦合線圈,實現水下裝備無線充電系統的最大效率控制。
38、通過上述方法,可以在初級側磁耦合模塊和次級側磁耦合模塊對接后,根據對接情況,篩選出最大效率傳輸線圈通斷控制的方案,通過關閉耦合效果差的耦合線圈,導通耦合效果好的耦合線圈(即pin-min對應的耦合線圈),實現能源的高效率補給。在此過程中,不僅弱化了對心不準帶來的影響,還能避免其余耦合線圈開通時造成的額外渦流損耗。
39、簡而言之,假定次級側線圈為面積1,初級側線圈陣列由m×n個和次級側線圈大小一樣的線圈組成,即面積為m×n;面積為1的次級側線圈落在面積為m×n的初級側線圈陣列內的任意區域均可以工作,因此實現了寬區域工作的特點,降低對耦合精度(即對接精度)的要求;而為了避免面積為m×n的初級側線圈陣列均開通造成的損耗,因此,本發明又提供了與之對應的最大效率跟蹤的篩選過程,即找到與次級側一個線圈耦合效果最好的一個或幾個初級側線圈,通過僅開通該組線圈,關閉其余線圈,避免額外的渦流損耗。
40、本發明的工作原理:
41、水下航行器對接完成后,只要次級側磁耦合模塊落入初級側磁耦合模塊所在的區域內,無線充電系統即可上電,為水下航行器能源補給做好準備。組成初級側磁耦合模塊的線圈陣列中,與次級側磁耦合模塊的線圈距離越近,對能量傳輸的貢獻越大。若所有線圈均開啟工作,會在周圍的海水環境中產生很大的渦流損耗,從而降低無線充電系統的效率。考慮到在無線充電系統穩定工作后,接收端的接收功率在短時間內基本不變;此時,若發射端僅開啟與次級側磁耦合模塊耦合效果最好的線圈,即可在輸出功率一定時找到一個最小的輸入功率(此處,輸出功率為次級側磁耦合模塊供給水下航行器的功率;輸入功率為水下充電裝置供給初級側磁耦合模塊的功率),就能實現無線充電系統的最大效率傳輸。
42、因此,本發明在磁耦合器結構的基礎上還提出了基于二分法的初級側最大效率控制方法,采用將初級側線圈陣列逐步二分的思想,從而快速找到與次級側線圈耦合效果最好的初級側線圈,實現無線充電系統的快速最大效率跟蹤,保證無線充電系統能量穩定高效傳輸。
43、基于二分法的初級側最大效率跟蹤方法的原理如圖3所示:一般情況下,次級側負載所需的恒定輸出電壓?vout?保持不變,短時間內電阻r也保持不變,則此時無線充電系統的輸出功率pout=vout×(vout/r),由負載決定,短時間內不會發生變化。由于無線充電系統輸入功率pin=vin×iin,系統效率η=pout/pin,那么當pout不變,pin最小時,η最大。因此,可以通過切換初級側線圈的導通和斷開,找到最小的輸入功率pin,即找到與次級側線圈耦合效果最好的初級側線圈,避免其余線圈開通時造成的額外渦流損耗,從而實現無線充電系統的高效傳輸。
44、本發明的優點:
45、1.本發明無線充電耦合器的結構巧妙,尤其是次級側磁耦合模塊的結構簡單,體積小,在不額外增加次級側磁耦合模塊復雜度和重量的前提下,能一定程度上解決在橫滾和軸向躥動方向上因對接精度不足使耦合器無法對中從而造成無線充電系統失效的情況,具有寬工作區域的優勢。
46、2.本發明結合所提出的基于二分法的最大效率控制方法,可以快速確定與次級側線圈耦合效果最好的初級側線圈,從而僅接通對應位置的初級側線圈,避免其余線圈在海水中產生額外的渦流損耗,提高無線充電系統的整體效率,實現航行器在對心不準確下的高效能源補給。
- 還沒有人留言評論。精彩留言會獲得點贊!