一種常直雙側FLC與水電一次調頻協調控制及其參數優化方法
本發明涉及電力系統控制,尤其涉及一種常直雙側flc與水電一次調頻協調控制及其參數優化方法。
背景技術:
1、異步聯網可以解決大規模交直流并聯電網故障后帶來的功率和電壓等穩定問題,但異步后,同步電網的網架規模減小,系統轉動慣量大幅下降,頻率調節能力削弱。
2、相關技術方案中,為解決這個問題,一些學者提出了在直流控制系統中增加直流頻率限制控制器((frequency?limit?controller,flc),讓直流參與電網頻率的調節。直流flc本質上是高壓直流輸電系統的一種頻率附加控制,可分為兩類,一種基于比例-積分(proportional-integral,pi)環節的flc,另外一種基于一階慣性環節的flc。
3、然而,二者引入的都是頻率偏差信號,模擬均為同步發電機的一次調頻特性,但這會引入頻率的高頻噪聲,可能會引起系統的振蕩。
4、隨著電網的發展,異步互聯的雙側系統均需要直流系統參與頻率調節,同時也需要考慮控制參數的優化。而控制器參數對頻率協調控制功能的控制效果影響具有決定性作用,不合理的控制參數會影響控制器的收斂效果,甚至導致控制無法收斂,因此,需要一種常直雙側flc與水電一次調頻協調控制及其參數優化方法,在不引入頻率的高頻噪聲的基礎上,克服異步聯網后同步電網的網架規模減小、系統轉動慣量大幅下降、頻率調節能力削弱的問題。
5、上述內容僅用于輔助理解本發明的技術方案,并不代表承認上述內容是現有技術。
技術實現思路
1、本發明的主要目的在于提供一種常直雙側flc與水電一次調頻協調控制及其參數優化方法,旨在解決如何克服異步聯網后同步電網的網架規模減小、系統轉動慣量大幅下降、頻率調節能力削弱的問題。
2、為實現上述目的,本發明提供的一種常直雙側flc與水電一次調頻協調控制及其參數優化方法,所述方法包括:
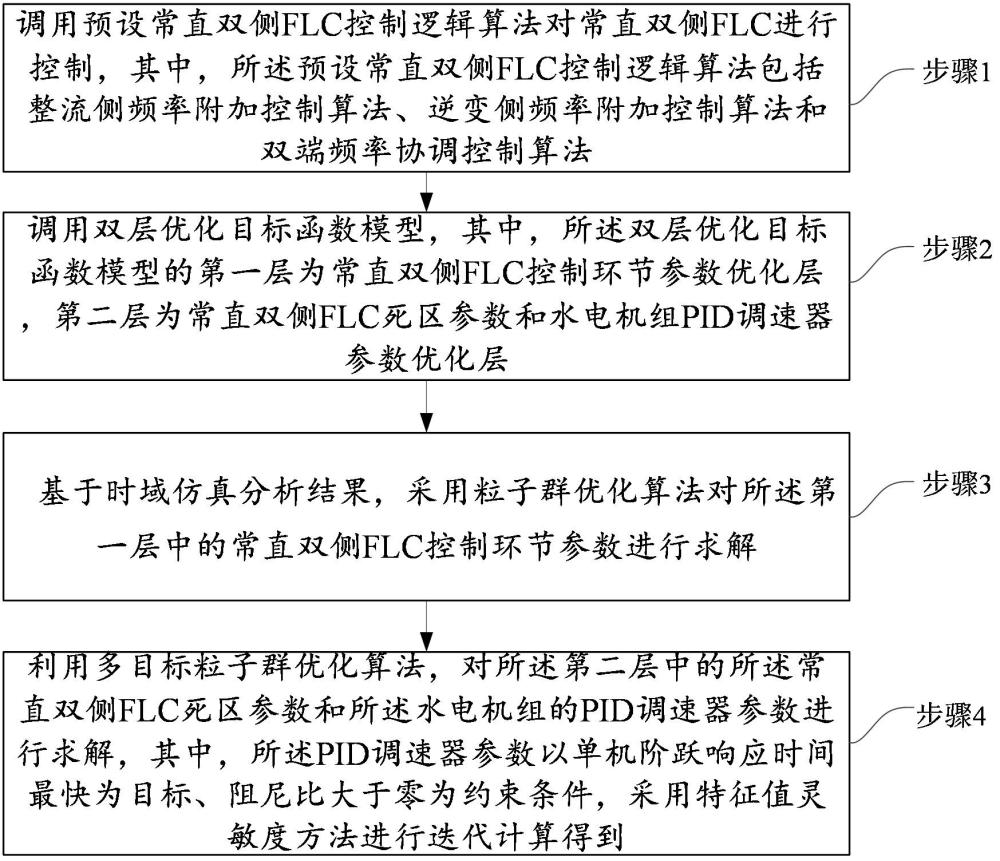
3、調用預設常直雙側flc控制邏輯算法對常直雙側flc進行控制,其中,所述預設常直雙側flc控制邏輯算法包括整流側頻率附加控制算法、逆變側頻率附加控制算法和雙端頻率協調控制算法;
4、調用雙層優化目標函數模型,其中,所述雙層優化目標函數模型的第一層為常直雙側flc控制環節參數優化層,第二層為常直雙側flc死區參數和水電機組pid調速器參數優化層;
5、基于時域仿真分析結果,采用粒子群優化算法對所述第一層中的常直雙側flc控制環節參數進行求解;以及,
6、利用多目標粒子群優化算法,對所述第二層中的所述常直雙側flc死區參數和所述水電機組的pid調速器參數進行求解,其中,所述pid調速器參數以單機階躍響應時間最快為目標、阻尼比大于零為約束條件,采用特征值靈敏度方法進行迭代計算得到。
7、可選地,所述整流側頻率附加控制算法包括:
8、獲取送端電網交流頻率和電網額定頻率;
9、將所述送端電網交流頻率與所述電網額定頻率作差,得到送端電網頻率偏差值;
10、將送端電網頻率偏差值和送端死區的差輸入至pi控制器,計算出整流側頻率;
11、基于所述整流側頻率進行附加控制。
12、可選地,所述逆變側頻率附加控制算法包括:
13、獲取受端電網交流頻率與電網額定頻率;
14、將所述受端電網交流頻率與所述電網額定頻率作差,得到受端電網頻率偏差;
15、將所述受端電網頻率偏差和受端死區的差輸入至pi控制器中,計算出逆變側頻率;
16、基于所述逆變側頻率進行附加控制。
17、可選地,所述雙端頻率協調控制算法包括:
18、獲取雙端頻率,并計算兩側頻差;
19、基于所述兩側頻差,計算功率調節量的差值,
20、將系統頻差抑制至所述功率調節量的差值內,以將系統頻差抑制在雙側flc死區內。
21、可選地,所述常直雙側flc控制環節參數優化層的目標函數,包括:
22、
23、
24、其中,為仿真時長;為常直雙側flc控制環節參數;為送端電網頻率偏差的絕對值與受端電網頻率偏差的絕對值之和;為數量級調節因子,以避免在優化中出現因數量級差異造成“覆蓋”現象;為送端flc功率調節量與受端flc功率調節量之差的絕對值;為送端flc功率調節量;為受端flc功率調節量;為送端電網頻率偏差;為受端電網頻率偏差。
25、可選地,所述常直雙側flc死區參數和水電機組pid調速器參數優化層的目標函數,包括:
26、
27、
28、
29、
30、其中,為雙側flc死區下限;為雙側flc死區上限;n為采樣總頻次;為第k次采樣時送端電網實測頻率、為第k次采樣時受端電網實測頻率、為第k次采樣時送端電網額定頻率,為采樣時間間隔,為第k次采樣時常直雙側flc的功率調節量,為調用水電機組一次調頻備用的時間。
31、可選地,所述基于時域仿真分析結果,采用粒子群優化算法對所述第一層中的常直雙側flc控制環節參數進行求解的步驟,具體包括:
32、s1,設置模型參數及優化算法參數初始值;
33、s2,計算各粒子的目標值;
34、s3,基于所述目標值更新各粒子的速度、位置、權重參數;
35、s4,將最新的粒子參數更新為控制器參數、;
36、s5,判斷所更新的控制器參數、是否滿足迭代精度要求,若是則執行步驟s7,若否則執行步驟s6;
37、s6,將所更新的控制器參數、輸入pscad電磁暫態仿真工具中,以得到目標函數模型計算所需的模型參數,然后返回步驟s2;
38、s7,輸出當前的控制器參數值作為最終的常直雙側flc控制環節參數。
39、可選地,所述利用多目標粒子群優化算法,對所述第二層中的所述常直雙側flc死區參數和所述水電機組pid調速器參數進行求解的步驟包括:
40、s10,種群初始化;
41、s20,確定個體最優與群體最優;
42、s30,更新慣性權重;
43、s40,最新粒子的速度和位置;
44、s50,交叉變異操作;
45、s60,計算粒子的適應度并更新pareto最優解集;
46、s70,更新群體最優與個體最優;
47、s80,判斷是否滿足預設迭代次數,若是則輸出結果,若否則返回步驟30。
48、可選地,所述pid調速器參數的計算步驟包括:
49、s100,初始化pid調速器參數;
50、s200,根據狀態空間方程求解實部最大的特征值,并求出其對應的阻尼比;
51、其中,為系統的衰減因子,為角頻率;
52、s300,基于特征值靈敏度分析算法,計算各個pid調速器參數對應的特征值靈敏度,根據所設步長l,得到,即:
53、
54、其中,l為步長,rand1,rand2,rand3為(0,1)的隨機數;
55、s400,判斷,若是,則將pid調速器參數更新為:
56、
57、其中,,,為積分上限時間,為系統在時間t的輸出值,為穩態值,為水輪機系統開環傳遞函數,為復變量,為穩態增益系數;
58、s500,重復s200~s400,直到阻尼比小于預設阻尼比閾值,或直到迭代次數達到預設次數,輸出當前的pid調速器參數為最終pid調速器參數。
59、此外,為實現上述目的,本發明還提供一種水電系統,所述水電系統包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的常直雙側flc與水電一次調頻協調控制及其參數優化程序,所述常直雙側flc與水電一次調頻協調控制及其參數優化程序被所述處理器執行時實現如上任一項所述的常直雙側flc與水電一次調頻協調控制及其參數優化方法的步驟。
60、本發明的有益效果是:本發明不僅能夠實現直流系統互聯電網的頻率相互支撐,還充分考慮了控制參數影響,送、受端電網在大功率階躍擾動下的頻率峰值波動程度均有所下降,為擾動側的電網提供頻率支撐,不會擴大事故范圍,提高互聯電網的頻率穩定性。在大功率階躍擾動工況下均能保證雙側flc對送、送端電網頻率的有效調節,具有較好的適應性,而且不會改變交流系統頻率控制的基本原則,符合實際電網的運行要求。
- 還沒有人留言評論。精彩留言會獲得點贊!