一種無人機驗電、掛接地線一體化裝置及控制系統的制作方法
本發明涉及無人機檢修,具體為一種無人機驗電、掛接地線一體化裝置及控制系統。
背景技術:
1、公開號為“cn218242283u”的發明專利申請文件公開了一種架空輸電線路無人機掛拆接地線裝置,屬于無人機檢修應用領域。技術方案是:延長線軸一和延長線軸二分別與無人機a和無人機b連接;延長線軸二通過連接桿二與驅動裝置頂部連接,驅動裝置底部與接地裝置連接;驅動裝置側面設有接地線板二;延長線軸一通過連接桿一與接地線桿頂部連接,接地線桿內側設有接地卡扣;接地線桿外側設有接地線板一,接地線板一通過接地線與接地線板二連接。本發明可以實現無人機攜帶接地線進行高空掛拆接地線,避免傳統人工高空作業驗電,保障作業人員安全,結構簡單、成本低廉、易于加工制作,具有廣泛的推廣前景。
2、上述文件公開的架空輸電線路無人機掛拆接地線裝置存在以下缺陷:該技術方案在對纖維繩進行收卷的時候,會出現收卷不均勻的情況,導致一邊卷繩過多出現繩索脫落的情況。
3、由此可知,現有的架空輸電線路無人機掛拆接地線裝置不具備收卷限位的結構,需要對現有不足進行改進,提供一種無人機驗電、掛接地線一體化裝置及控制系統。
技術實現思路
1、本發明的目的在于提供一種無人機驗電、掛接地線一體化裝置及控制系統,以解決上述背景技術中提出的問題。
2、為解決上述技術問題,本發明是通過以下技術方案實現的:
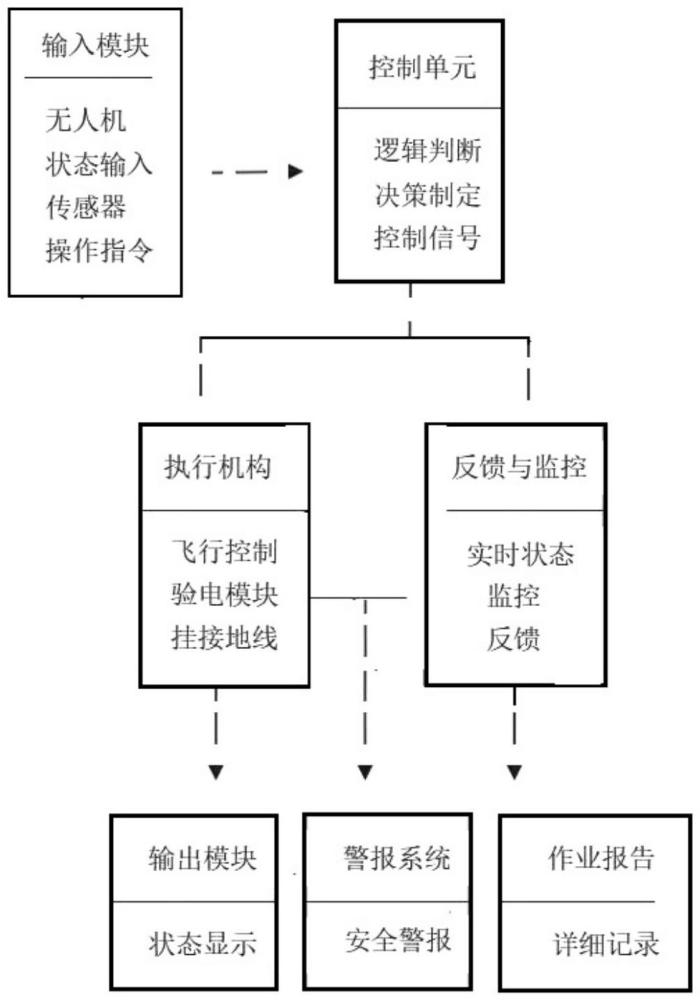
3、一種無人機驗電、掛接地線一體化裝置的控制系統,包括無人機平臺、驗電控制模塊、掛接地線控制模塊、中央控制單元、傳感器與數據采集模塊、人機交互模塊以及通信模塊;
4、所述無人機平臺作為整個系統的載體,負責搭載驗電模塊、掛接地線模塊及控制單元等組件進行飛行作業;
5、所述驗電控制模塊用于對電力線路進行非接觸式驗電,檢測線路是否帶電;
6、所述掛接地線控制模塊用于在確認電力線路無電后,自動或手動控制掛接地線,實現線路的接地保護;
7、所述中央控制單元為整個控制系統的核心,負責接收傳感器數據、處理控制算法、發出控制指令;
8、所述傳感器與數據采集模塊用于實時監測無人機狀態、電力線路狀態及驗電結果等關鍵信息;
9、所述人機交互模塊為操作人員提供遠程監控和控制手段,同時展示作業數據和報告;
10、所述通信模塊實現無人機與控制中心之間的實時通信和數據傳輸。
11、進一步地,所述驗電控制模塊包括感應式驗電器、信號處理電路以及數據傳輸接口。
12、進一步地,所述傳感器與數據采集模塊包括位置傳感器、姿態傳感器、電流傳感器以及圖像傳感器。
13、進一步地,所述人機交互模塊包括顯示屏、操作按鈕、觸摸屏等輸入輸出設備。
14、控制流程如下:
15、s1、系統初始化與準備階段
16、無人機平臺檢查:確認無人機機體、動力系統、導航系統、通信系統等部件完好無損,電池電量充足,并進行必要的預熱和校準;
17、模塊安裝與檢查:將驗電模塊、掛接地線模塊及控制單元等組件正確安裝到無人機上,檢查各模塊之間的連接是否牢固,確保數據傳輸暢通無阻;
18、通信測試:測試無人機與控制中心之間的通信鏈路,確保實時數據傳輸的穩定性和可靠性;
19、作業計劃制定:根據電力巡檢任務要求,制定詳細的作業計劃,包括作業區域、作業時間、飛行路線、驗電點位置及掛接地線策略等;
20、s2、飛行與驗電階段
21、起飛與導航:操作人員通過人機交互界面發送起飛指令,無人機按照預設的飛行路線自主飛行至目標區域;在飛行過程中,無人機信息獲取終端實時采集并傳輸飛行狀態數據至控制分析終端;
22、圖像采集與處理:當無人機接近電力線路時,圖像終端啟動,對架空電纜進行高清拍攝,生成電纜圖像信息;控制分析終端接收圖像信息后,利用圖像處理技術提取關鍵特征,為后續的驗電操作提供數據支持;
23、驗電操作:驗電模塊在控制分析終端的指令下開始工作;驗電金屬探測頭與電力線路接觸,通過驗電器和接觸測量電路檢測線路是否帶電;驗電結果通過無線通訊模塊實時傳輸至控制分析終端;
24、s3、掛接地線階段
25、決策判斷:控制分析終端根據驗電結果和實時數據,判斷電力線路是否滿足掛接地線條件;若線路無電,則發出掛接地線指令;
26、掛接地線操作:掛接地線模塊在接收到指令后,啟動驅動裝置,控制掛接機構將接地線準確掛接到電力線路上;同時,無人機保持懸停狀態,確保掛接過程的穩定性和安全性;
27、s4、返航與數據記錄
28、完成掛接地線:確認接地線已牢固掛接后,無人機控制終端發出返航指令,無人機按照預設的返航路線返回起點;
29、數據記錄與報告:在整個作業過程中,控制系統實時記錄無人機狀態、驗電結果、掛接地線操作等關鍵數據,并生成詳細的作業報告;操作人員可通過人機交互界面查看報告內容,對作業效果進行評估和總結。
30、一種無人機驗電、掛接地線一體化裝置,包括旋翼無人機本體、驗電器以及輔助掛線機構,所述驗電器固定在旋翼無人機本體下端的支架上,所述輔助掛線機構包括兩個收放組件,收放組件的外表面均纏繞設置有連接繩,兩個所述連接繩的一端均固定安裝有連接桿,兩個所述收放組件的外表面均設有限位組件,兩個所述收放組件的外表面均設有無人機連接板,一組所述連接桿的一端設有接地線桿,另一組所述連接桿的一端設有驅動組件,所述接地線桿與驅動組件之間設有接地線組件。
31、進一步地,所述限位組件包括安裝板,所述安裝板安裝與收放組件的外表面,所述安裝板的內表面固定安裝有電推桿,所述電推桿的輸出端安裝有安裝套殼,所述安裝套殼的內壁兩側均開設有凹槽。
32、進一步地,兩個凹槽的內壁均滑動連接有活動塊,兩個所述活動塊的內壁均固定安裝有軸承,兩個所述軸承的內壁固定安裝有轉動輪,所述轉動輪與連接繩相抵接,兩個所述活動塊的一側均固定安裝有兩組彈簧,所述彈簧的一端與凹槽相連接。
33、進一步地,所述接地線桿的外表面固定安裝有兩組卡扣。
34、進一步地,所述驅動組件包括容納殼、開合電機和開合爪,所述容納殼的一側固定安裝有開合電機,所述容納殼的內部活動安裝有開合爪,所述開合爪延伸至容納殼的外表面,所述開合爪與開合電機的輸出端相連接。
35、進一步地,所述接地線組件包括第一接地線板、第二接地線板和接地線,所述第一接地線板安裝與接地線桿的外表面,所述第二接地線板安裝與容納殼的外表面,所述第二接地線板通過接地線與第一接地線板相連接。
36、本發明具有以下有益效果:
37、一、本發明通過配置無人機信息獲取、圖像處理、控制分析、無人機操控以及驗電掛接地線模塊的控制終端,旨在通過自動化的掛接地線操作來顯著減少無人機在驗電作業中遭遇故障的可能性。這些終端不僅匯聚了無人機自身信息、電纜的詳盡圖像資料以及各類傳感器數據,極大地豐富了控制分析環節的數據基礎,還促進了分析精度與控制效率的雙重提升。這一綜合設計確保了無人機驗電過程的安全性與高效性,有效降低了作業風險;
38、二、本發明通過啟動電推桿帶動安裝套殼前后移動,安裝套殼移動帶動轉動輪前后移動,轉動輪前后移動對連接繩進行限位抵接,從而使連接繩可以均勻的收卷在收放組件的外表面,連接繩在收卷的時候使轉動輪通過軸承產生轉動,從而使轉動輪在被連接繩帶動轉動的情況下對收卷中的連接繩進行抵接限位,摩擦力相對也較低,并且通過彈簧和活動塊與凹槽的滑動連接,使轉動輪有一定的活動范圍,避免與連接繩抵接較為緊固的情況,從而進一步降低了轉動輪與連接繩的磨損情況,通過限位組件的整體配合避免了連接繩收卷不均勻,導致一邊卷繩過多出現繩索脫落的情況。
39、當然,實施本發明的任一產品并不一定需要同時達到以上所述的所有優點。
- 還沒有人留言評論。精彩留言會獲得點贊!