一種永磁同步電機控制方法
本發明涉及電機控制,特別涉及一種永磁同步電機控制方法。
背景技術:
1、永磁同步電機因結構簡單、功率密度大并且可控性強、機械特性硬、響應速度快、調速范圍寬,能夠滿足高性能系統的要求。這使其成為了電機驅動系統的首選方案,已在眾多工程領域得到了廣泛應用。然而電機控制系統中存在著參數漂移、外部干擾等問題,傳統的pi控制對參數變化比較敏感,難以取得理想的控制效果。因此開發高性能控制技術成為當前的主流研究。
2、滑模控制得益于對系統參數不敏感、響應快且魯棒性強等優勢,被廣泛應用在永磁同步電機調速系統中。滑模控制包括兩個階段:到達階段和滑動階段。在滑動階段,傳統線性滑模面系統狀態只能實現漸進收斂,收斂速度較慢,控制效果不理想。添加積分項和終端項改善其控制品質,積分項的存在消除了穩態誤差的同時卻更容易引起超調問題。此外,在到達滑模面的過程中,不連續開關函數的存在導致系統抖振,影響系統的控制性能。
3、在系統運行過程中,內部參數變化和外部負載的變化都會影響系統的性能,其擾動大小是未知的。為了抑制這部分擾動的影響,利用擾動觀測器對系統未知擾動進行估計,并補償給控制器,以進一步提高系統的控制性能。觀測器估計擾動的精度問題和有限時間問題仍然是研究的重點。因此,提高基于擾動觀測器的永磁同步電機的控制精度以及收斂性能仍是一個重大挑戰。
技術實現思路
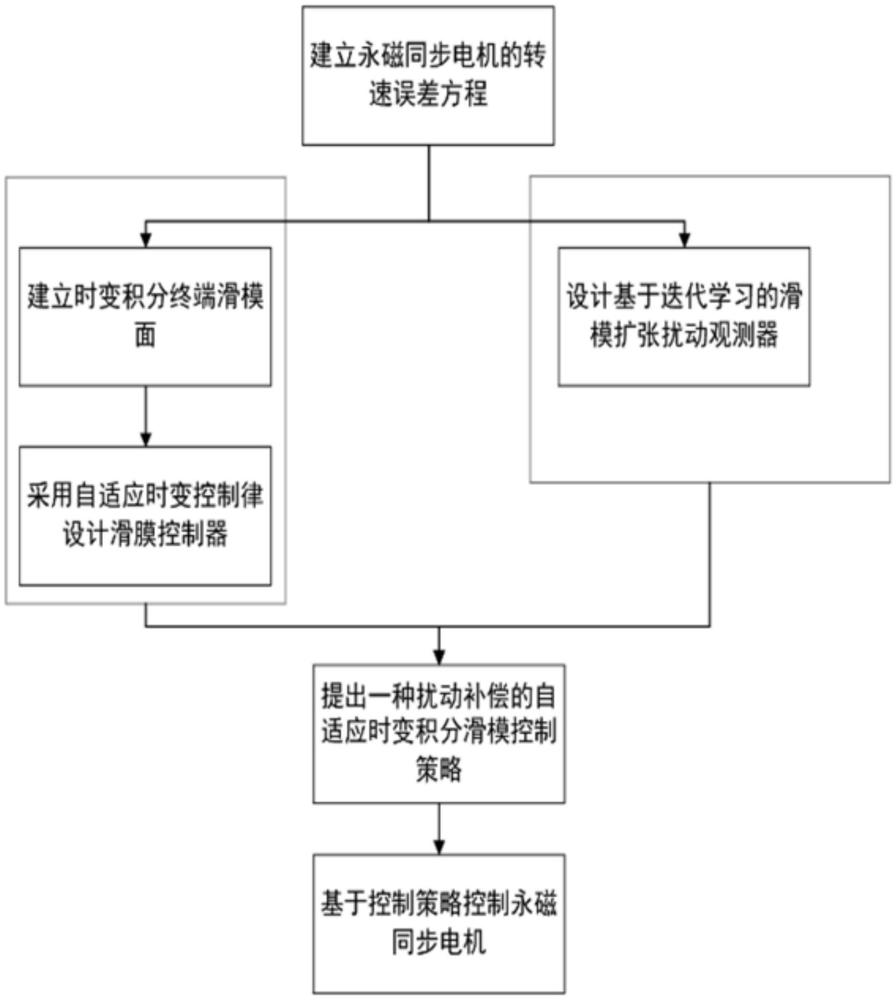
1、本發明實施例提供的一種永磁同步電機控制方法,包括:
2、基于永磁同步電機的機械運動方程,構建電機轉速誤差方程;
3、基于所述電機轉速誤差方程,構建時變積分滑模面;
4、基于時變積分滑模面,構建自適應時變積分滑模控制器;
5、基于所述電機轉速誤差方程,構建基于迭代學習的滑模擴張擾動觀測器;
6、基于自適應時變積分滑模控制器和基于迭代學習的滑模擴張擾動觀測器,對永磁同步電機進行控制。
7、優選的,所述基于永磁同步電機的機械運動方程,構建電機轉速誤差方程,包括:
8、獲取永磁同步電機的機械運動方程:
9、
10、式中,ω表示實際轉子角速度,表示ω的一階導數,ktkt表示轉矩常數,kt=1.5pnψf,pn為磁極對數,ψf表示磁鏈值,iq表示實際的q軸電流,b為粘性摩擦系數,j表示旋轉慣量,tl表示負載轉矩;
11、用給定的q軸電流代替實際的q軸電流,構建等效干擾模型:
12、
13、式中,d為永磁同步電機系統的集總不確定性擾動,表示給定的q軸電流;q軸電流電機為實際控制中電機的期望控制電流;
14、電機給定轉速設為nref,電機的真實轉速為n,取轉速的誤差的積分為狀態變量
15、電機轉速誤差方程構建如下:
16、
17、式中,ξ1表示轉速誤差的積分,ξ2表示轉速誤差ξ1的一階導數,nref表示電機的給定轉速,n表示電機的真實轉速,ωref表示給定的轉子角速度;轉子角速度為電機的期望速度。
18、優選的,所述基于所述電機轉速誤差方程,構建時變積分滑模面,包括:
19、電機轉速誤差方程的轉速誤差快速收斂到狀態零點,所設計的時變積分終端滑模面:
20、
21、式中,p>0,q>0;sgn()是開關函數;狀態零點指的是誤差作為狀態變量,收斂于0;在積分器中添加自適應時變積分初始狀態:
22、
23、s1,r1,s2,r2均小于0;
24、時變積分滑模面構建如下:
25、
26、0<λ<1。
27、優選的,所述基于時變積分滑模面,構建自適應時變積分滑模控制器,包括:
28、自適應時變積分滑模控制器構建如下:
29、
30、α>1,k0>0,0<p<1;
31、式中,|ξ1|α+k0項使得系統狀態遠離滑模面時速度加快,靠近滑模面時速度減慢;并且通過分段函數來對趨近律進行切換,當系統運動到滑模面附近,不含有開關項,并且由于冪次項e|s|psgn(s)的存在,系統依舊能收斂到零,在保證速度的同時降低了抖振;
32、為了驗證滑模面的穩定性,利用李雅普諾夫方程v=0.5s2,求導得可得:
33、|s|>q時,
34、|s|≤q時,
35、λ=|ξ1|α+k0;
36、在狀態變量到達滑模面前,恒小于0,滿足穩定性條件,系統是穩定的。
37、優選的,所述基于所述電機轉速誤差方程,構建基于迭代學習的滑模擴張擾動觀測器,包括:
38、構造估計方程為:表示d的觀測值;
39、基于等效干擾模型及其估計方程,得到觀測誤差:
40、
41、基于所述轉速觀測誤差設計觀測器的滑模面為:趨近律選擇自適應切換控制律usw;
42、待設計的觀測器的控制項usmo=usw-eω,利用李雅普諾夫定理可證此擴張滑模擾動觀測器穩定;
43、引入迭代學習,構造基于迭代學習的滑模擾動觀測器如下:
44、
45、r>0,r為學習增益,影響跟蹤精度和收斂速度;0<η<1,e為衰減非周期擾動積累效應的遺忘因子。
46、優選的,所述將時變積分滑模控制和基于迭代學習的滑模擾動觀測器結合對永磁同步電機進行控制包括:
47、基于所述將時變積分滑模控制和基于迭代學習的滑模擾動觀測器結合對永磁同步電機進行控制,將等效控制律和切換控制率更新為
48、
49、將基于更新后的控制率,得到系統的實際控制其輸出:
50、
51、為了分析時變積分滑模控制在迭代學習滑模擾動觀測器下的穩定性,在第j次迭代時構造李雅普諾夫函數如下:
52、
53、其中,sj是引入觀測器的第j次迭代后的滑模面,可得:
54、當s<q時:
55、
56、因此,第一個李雅普諾夫函數在兩次迭代之間的變化可以推導為:
57、
58、第二個李雅普諾夫函數在兩次連續迭代之間的變化有如下形式:
59、
60、第三個李雅普諾夫函數在兩次連續迭代之間的變化可以有如下形式:
61、
62、可以得到李雅普諾夫函數在第j次和第j-1次迭代之間的變化量:
63、
64、非常小,則上式滿足
65、
66、令當到達率系數e滿足則△vj為半負定,且s≠0時,△vj<0,保證控制上述控制器能收斂于零;
67、s>q時,同理可證收斂于零。
68、與現有技術相比,本發明所達到的有益效果:采用自適應時變增益切換控制律控制自適應時變積分滑模面,在提升滑模控制器的快速收斂性能的同時,削弱了系統抖振,并且消除了系統啟動和恢復時的超調。提出了基于迭代學習的滑模擴張擾動觀測器,對電機運行過程中所受到的不確定性擾動進行觀測,最終將所述自適應時變積分滑模與所述基于迭代學習的滑模擴張擾動觀測器結合對永磁同步電機進行復合控制。與傳統的pi、smc控制相比,本發明的動態性能更強、魯棒性能更好。
69、本發明的其它特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點可通過在所寫的說明書、權利要求書、以及附圖中所特別指出的結構來實現和獲得。
70、下面通過附圖和實施例,對本發明的技術方案做進一步的詳細描述。
- 還沒有人留言評論。精彩留言會獲得點贊!