電機控制系統、電機控制方法及飛行汽車與流程
本技術涉及飛行汽車,尤其涉及一種電機控制系統、電機控制方法及飛行汽車。
背景技術:
1、當前飛行汽車發展飛速,為了追求飛行汽車的性能,提高效率,電機在飛行汽車中應用越來越多。電機在應用中通常都是成對出現,需要協同控制。目前,在多電機的控制系統中,部分電機由對應的微控器進行控制,以實現飛行汽車的各項功能。
2、但是,現有電機控制系統中,對于采用單獨的微控器進行控制的電機,一旦控制該電機的微控器出現異常,便無法正常驅動該電機,影響飛行汽車的相應功能的實現。
3、上述內容僅用于輔助理解本技術的技術方案,并不代表承認上述內容是現有技術。
技術實現思路
1、本技術的主要目的在于提供了一種電機控制系統、電機控制方法及飛行汽車,旨在解決現有技術對于采用單獨的微控器進行控制的電機,一旦控制該電機的微控器出現異常,便無法正常驅動該電機,影響飛行汽車的相應功能的實現的技術問題。
2、為實現上述目的,本技術提供了一種電機控制系統,所述電機控制系統包括:數據選擇電路以及多個微控器;
3、所述數據選擇電路分別與各所述微控器以及多個電機驅動電路連接,各所述電機驅動電路與對應的電機連接;
4、其中,各所述微控器與各所述電機驅動電路對應,各所述微控器通過對應的電機驅動電路對各所述電機進行驅動;
5、所述數據選擇電路,用于接收各所述微控器輸出的數據選擇信號;
6、所述數據選擇電路,還用于根據各所述數據選擇信號的頻率判斷對應的微控器是否異常;
7、所述數據選擇電路,還用于在任一微控器異常時,選擇另一微控器的電機驅動信號輸出至異常的微控器對應的目標電機驅動電路,以對與所述目標電機驅動電路所連接的電機進行驅動。
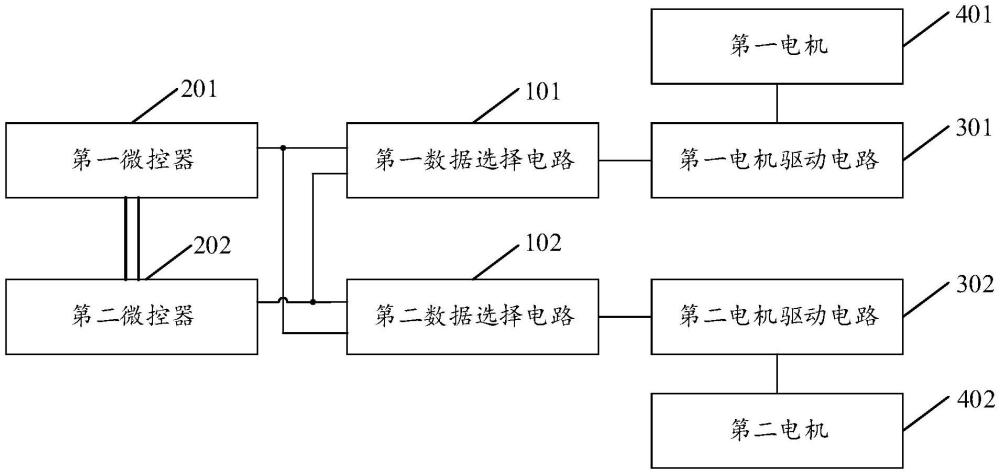
8、在一實施例中,所述微控器包括:第一微控器以及第二微控器;
9、所述數據選擇電路包括:第一數據選擇電路以及第二數據選擇電路;
10、所述第一數據選擇電路分別與所述第一微控器、所述第二微控器以及第一電機驅動電路連接,所述第一電機驅動電路與第一電機連接,所述第二數據選擇電路分別與所述第一微控器、所述第二微控器以及第二電機驅動電路連接,所述第二電機驅動電路與第二電機連接;
11、其中,所述目標電機驅動電路為所述第一電機驅動電路或所述第二電機驅動電路;
12、所述第一數據選擇電路,用于在所述第一微控器異常時,將所述第二微控器輸出的第二電機驅動信號輸出至所述第一電機驅動電路,以對所述第一電機進行驅動;
13、所述第二數據選擇電路,用于在所述第二微控器異常時,將所述第一微控器輸出的第一電機驅動信號輸出至所述第二電機驅動電路,以對所述第二電機進行驅動。
14、在一實施例中,所述第一數據選擇電路包括:第一頻率轉ttl電路、第二頻率轉ttl電路、第一或門以及第一數據選擇器;
15、所述第一頻率轉ttl電路分別與所述第一微控器的信號端以及所述第一或門的第一輸入端連接,所述第二頻率轉ttl電路分別與所述第二微控器的信號端以及所述第一或門的第二輸入端連接,所述第一或門的輸出端與所述第一數據選擇器連接,所述第一數據選擇器還與所述第一電機驅動電路連接;
16、所述第一頻率轉ttl電路,用于將所述第一微控器輸出的第一數據選擇信號轉換為第一電平信號后輸出至所述第一或門;
17、所述第二頻率轉ttl電路,用于在所述第二微控器輸出的第二數據選擇信號的頻率大于預設頻率時,判定所述第一微控器異常,并將所述第二數據選擇信號轉換為第二高電平信號后輸出至所述第一或門;
18、所述第一或門,用于根據所述第一電平信號以及所述第二高電平信號輸出第一高電平狀態信號至所述第一數據選擇器;
19、所述第一數據選擇器,用于根據所述第一高電平狀態信號將所述第二微控器輸出的所述第二電機驅動信號輸出至所述第一電機驅動電路,以對所述第一電機進行驅動。
20、在一實施例中,所述第一數據選擇器中設有第一通道以及第二通道;
21、所述第一通道與所述第一微控器的電機驅動端連接,用于接收所述第一微控器輸出的所述第一電機驅動信號;
22、所述第二通道與所述第二微控器的電機驅動端連接,用于接收所述第二微控器輸出的所述第二電機驅動信號;
23、所述第一數據選擇器,用于在接收到所述第一高電平狀態信號時,將所述第二通道中的所述第二電機驅動信號輸出至所述第一電機驅動電路,以對所述第一電機進行驅動。
24、在一實施例中,所述第二數據選擇電路包括:第三頻率轉ttl電路、第四頻率轉ttl電路、第二或門以及第二數據選擇器;
25、所述第三頻率轉ttl電路分別與所述第二微控器的信號端以及所述第二或門的第一輸入端連接,所述第四頻率轉ttl電路分別與所述第一微控器的信號端以及所述第二或門的第二輸入端連接,所述第二或門的輸出端與所述第二數據選擇器連接,所述第二數據選擇器還與所述第二電機驅動電路連接;
26、所述第三頻率轉ttl電路,用于將所述第二微控器輸出的第二數據選擇信號轉換為第二電平信號后輸出至所述第二或門;
27、所述第四頻率轉ttl電路,用于在所述第一微控器輸出的第一數據選擇信號的頻率大于預設頻率時,判定所述第二微控器異常,并將所述第一數據選擇信號轉換為第一高電平信號后輸出至所述第二或門;
28、所述第二或門,用于根據所述第二電平信號以及所述第一高電平信號輸出第二高電平狀態信號至所述第二數據選擇器;
29、所述第二數據選擇器,用于根據所述第二高電平狀態信號將所述第一微控器輸出的所述第一電機驅動信號輸出至所述第二電機驅動電路,以對所述第二電機進行驅動。
30、在一實施例中,所述第二數據選擇器中設有第一通道以及第二通道;
31、所述第一通道與所述第二微控器的電機驅動端連接,用于接收所述第二微控器輸出的第二電機驅動信號;
32、所述第二通道與所述第一微控器的電機驅動端連接,用于接收所述第一微控器輸出的第一電機驅動信號;
33、所述第二數據選擇器,用于在接收到所述第二高電平狀態信號時,將所述第二通道中的所述第一電機驅動信號輸出至所述第二電機驅動電路,以對所述第二電機進行驅動。
34、在一實施例中,所述第一微控器,用于向所述第二微控器發送第一生命信號;
35、所述第一微控器,還用于判斷是否接收到所述第二微控器基于所述第一生命信號反饋的第二生命信號;
36、所述第一微控器,還用于在未接收到所述第二生命信號時,判定所述第二微控器異常,并輸出頻率大于預設頻率的第一數據選擇信號至所述第二數據選擇器。
37、在一實施例中,所述第二微控器,用于向所述第一微控器發送第二生命信號;
38、所述第二微控器,還用于判斷是否接收到所述第一微控器基于所述第二生命信號反饋的第一生命信號;
39、所述第二微控器,還用于在未接收到所述第一生命信號時,判定所述第一微控器異常,并輸出頻率大于預設頻率的第二數據選擇信號至所述第一數據選擇器。
40、此外,為實現上述目的,本技術還提出一種電機控制方法,所述電機控制方法應用于上文所述的電機控制系統,所述方法由所述數據選擇電路執行,所述方法包括:
41、接收各微控器輸出的數據選擇信號;
42、根據各所述數據選擇信號的頻率判斷對應的微控器是否異常;
43、在任一微控器異常時,選擇另一微控器的電機驅動信號輸出至所述任一微控器對應的目標電機驅動電路,以對與所述目標電機驅動電路所連接的電機進行驅動。
44、此外,為實現上述目的,本技術還提出一種飛行汽車,所述飛行汽車包括如上文所述的電機控制系統。
45、本技術提出的一個或多個技術方案,至少具有以下技術效果:
46、本技術的電機控制系統包括:數據選擇電路以及多個微控器;數據選擇電路分別與各微控器以及多個電機驅動電路連接,各電機驅動電路與對應的電機連接;其中,各微控器與各電機驅動電路對應,各微控器通過對應的電機驅動電路對各電機進行驅動。本技術的數據選擇電路接收各所述微控器輸出的數據選擇信號;數據選擇電路根據各數據選擇信號的頻率判斷對應的微控器是否異常;數據選擇電路在任一微控器異常時,選擇另一微控器的電機驅動信號輸出至異常的微控器對應的目標電機驅動電路,以對與目標電機驅動電路所連接的電機進行驅動。相較于現有技術,本技術在任一微控器異常時,通過選擇另一微控器的電機驅動信號對異常的微控器所對應的電機進行驅動,實現了電機的冗余控制,避免了微控器出現異常時,其所控制的電機無法正常驅動的情況,有效確保了飛行汽車各項功能的實現。
- 還沒有人留言評論。精彩留言會獲得點贊!