用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法
本發明涉及電網,具體地,涉及一種用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法、系統、介質及終端。
背景技術:
1、近年來,隨著海上風電資源的不斷開發,海上風電開發將逐步進入深、遠海區域,采用柔性直流輸送技術實現規模化海上風電送出將成為主要海上風電開發場景。通過柔性直流輸電送出時,海上風電場的頻率與岸上交流主網解耦,當交流主網頻率變化時,海上風電場無法感知該頻率變化,也無法提供慣量響應支撐電網。無慣量的風電-柔直并網系統對同步發電機的取代降低了電網的整體慣性,在海上風電-柔直系統單套容量已經達到gw級的背景下,將會嚴重影響電網運行的頻率穩定性。若要構建以風光電源為主力電源的新型能源系統,風電-柔直系統需要由跟隨型電源向主導型電源轉變,在一定程度上如同步發電機一般,承擔起維持系統實時能量平衡的義務。從成本角度考慮,由風電機組提供電網頻率響應是最經濟可靠的策略。風電機組可以通過變速運行,增加或釋放葉片及轉子中的動能,實現對電網的慣量響應功能,有必要時還可以通過有功備用實現一次調頻功能。但是,當采用柔性直流輸電送出并網時,由于柔直系統的隔離作用,風電機組無法感知電網頻率,需要將電網頻率傳遞到風電機組中。
2、經檢索,申請號為cn202310747803.2的中國專利提供了一種柔直輸電系統及其一次調頻控制方法和裝置,其頻率傳遞需要架設專用的通訊線路,實現陸上換流站與海上風電場能量管理系統間的實時通訊,會使海風-柔直并網系統的建設成本大大提高。同時,從風電場能量管理系統發出指令控制風電機組調節輸出功率,到風電機組功率調節完成,這個過程的延時使海上風電場的電網頻率響應速度減慢,對電網的支撐效果變差。
3、申請號為cn202311594378.4的中國專利提供了一種柔性直流輸電的風電場無源電網頻率控制系統及方法,其不需要借助通訊,但使用傳統方案控制直流電壓時,其控制速度較慢,可能會使傳遞的頻率信息出現滯后。同時,直流電壓傳遞電網頻率時,會受到直流電流在線路阻抗上的壓降影響,當有功功率變化時,線路阻抗上的壓降會隨之變化,導致海上換流站直流側電壓變化,可能會被誤判為電網頻率變化,使風電機組出現頻率響應誤動。
技術實現思路
1、針對現有技術中的缺陷,本發明的目的是提供一種用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法。
2、根據本發明的一個方面,提供一種用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法,包括:
3、受端換流站采用構網型控制,通過構建子模塊能量—同步發電機轉子的等價映射來實現電網相位的自同步與電網頻率的感知;
4、基于所述構網自同步與頻率檢測獲得的感知結果,通過交流控制、直流控制和/或均衡調制控制,在受端換流站三相橋臂中注入正序環流,和/或調節上、下橋臂子模塊插入指數中的直流分量,對正負極直流電壓獨立調節和控制;
5、通過分別控制受端換流站上、下橋臂的直流電壓給定值,利用調節和控制后的直流輸電系統正負極的電壓差來映射并傳遞電網頻率;送端換流站感知正負極直流電壓變化,從中還原出電網頻率,控制海上風電場交流頻率與電網頻率相同,實現電網頻率鏡像。
6、優選地,所述受端換流站采用構網型控制,通過構建子模塊能量—同步發電機轉子的等價映射來實現電網相位的自同步與電網頻率的感知,包括:
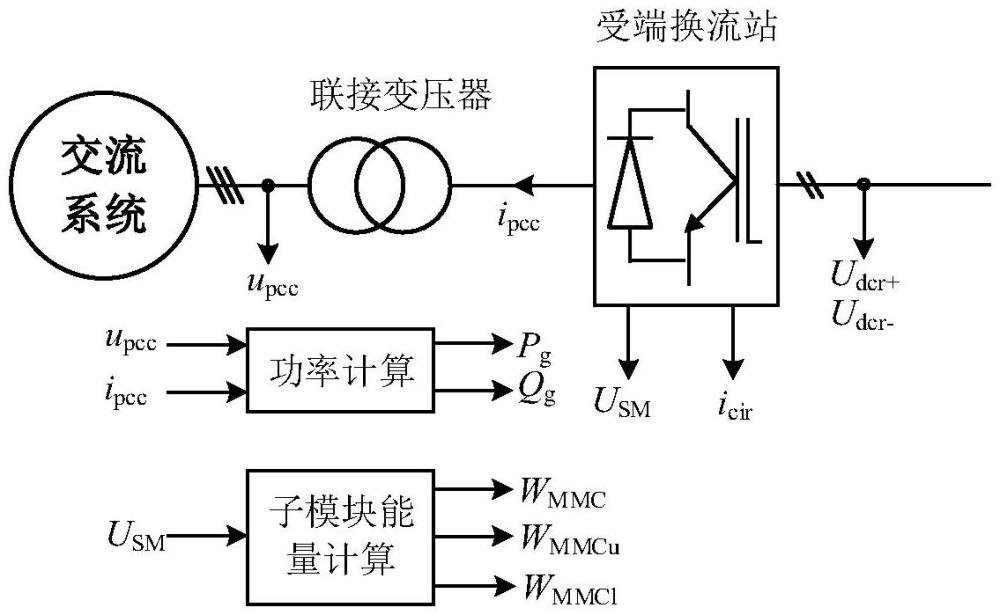
7、檢測受端換流站正極直流母線對地電壓udcr+、負極直流母線對地電壓udcr-、并網點交流電壓upcc、并網點交流電流ipcc、換流站所有子模塊電容電壓usm以及受端換流站三相橋臂的二倍頻環流icirj,j=a,b,c;
8、根據upcc和ipcc計算出受端換流站交流側的輸出有功功率pg與無功功率qg;根據所有上橋臂子模塊電容電壓usm分別計算出受端換流站上橋臂子模塊總能量、下橋臂子模塊總能量及子模塊總能量,具體為:
9、
10、wmmc=wmmcu+wmmcl
11、其中,wmmcu為受端換流站上橋臂子模塊總能量,wmmcu為受端換流站下橋臂子模塊總能量,wmmc為受端換流站子模塊總能量,csm為子模塊電容電壓,n為換流器每個橋臂的子模塊數目,usmaui為受端換流站a相上橋臂的第i個子模塊電容電壓,usmbui為受端換流站b相上橋臂的第i個子模塊電容電壓,usmcui為受端換流站c相上橋臂的第i個子模塊電容電壓,usmali為受端換流站a相下橋臂的第i個子模塊電容電壓,usmbli為受端換流站b相下橋臂的第i個子模塊電容電壓,usmcli為受端換流站c相下橋臂的第i個子模塊電容電壓;
12、計算柔直換流器的子模塊總能量wmmc與額定總能量wmmcref的差,將所得的差除以2hv,hv為虛擬慣性系數,加上額定頻率ω0,即得到換流器輸出交流頻率的參考值ωc;對ωc進行積分,得到換流器輸出交流相位的參考值θ。
13、優選地,所述交流控制,包括:
14、將wmmc與wmmcref的差乘以虛擬阻尼系數dv,再除以2hv以及pac0,其中pac0為當前受端換流站輸出有功功率,最終獲得交流電壓阻尼補償項△uac;再將無功功率的測量值qg與給定值qref作差,乘以kq,kq為無功功率控制下垂系數,將結果與額定相加,加上交流電壓的額定值ua0以及交流電壓阻尼補償項△uac,獲取輸出交流電壓的參考值uacref;
15、交流電壓參考值uacref與ud作差,再加上q軸電流第一參考值iq1乘以額定頻率ω0,再除以一個虛擬導納rv+slv,其中rv為虛擬電阻,lv為虛擬電感,s為拉普拉斯算子,獲取d軸電流的第一參考值id1;
16、將0與uq作差,減去id1乘以額定頻率ω0,再除以一個虛擬導納rv+slv,獲取q軸電流的第一參考值iq1;
17、然后,將id1和iq1通過一個限流環節后,得到d軸和q軸輸出電流的第二參考值idref和iqref,限流環節的原理為若id1和iq1的平方和開根號后小于限流幅值ilim,則idref=id1,iqref=iq1;若id1和iq1的平方和開根號后大于限流幅值ilim,則將id1和iq1等比例縮小n倍,直到id1/n和iq1/n的平方和開根號等于ilim;此時idref=id1/n,iqref=iq1/n;
18、將d軸電流與q軸電流的第二參考值idref、iqref與測量值id、iq作差,分別經過比例-積分控制器后,再分別加上dq軸解耦項ω0lcid與ω0lciq以及并網點交流電壓前饋項ud與uq,ω0為額定角頻率,lc為濾波電感,獲得受端換流站交流側dq調制電壓ed與eq,再在相位θ下進行反park變換,獲得受端換流站的交流側三相調制電壓ea、eb與ec。
19、優選地,所示直流控制,包括:
20、獲取此時的電網頻率ωg;
21、在獲取到電網頻率ωg后,將ωg與額定頻率ω0作差,乘以映射系數kdc后,獲得直流電壓的偏差值△udc,將柔直系統正極直流電壓的額定值udc0+加上△udc,獲得正極直流電壓的參考值udcrref+,將柔直系統負極直流電壓的額定值udc0-減去△udc,獲得負極直流電壓的參考值udcrref-;
22、將柔直系統正極直流電壓參考值udcrref+與柔直系統正極直流電壓測量值udcr+作差,經過一個比例-積分控制器后,加上前饋udcr+,獲得受端換流站正極直流電壓調制波edcrref+;
23、將柔直系統負極直流電壓參考值udcrref-與柔直系統負極直流電壓測量值udcr-作差,經過一個比例-積分控制器后,加上前饋udcr-,獲得受端換流站負極直流電壓調制波edcrref-。
24、優選地,所述電網頻率ωg的獲取方式,包括以下的一種或多種:
25、通過與電網通訊獲取;
26、在跟網型控制下,通過鎖相環獲取pcc點的交流頻率ωpcc,并以此作為電網頻率ωg;
27、在構網型控制下,使用受端換流站自身的頻率ωc作為電網頻率ωg。
28、優選地,所述均衡調制,包括:
29、計算受端換流站上橋臂子模塊總能量wmmcu與下橋臂總能量wmmcl之差,經過一個比例-積分控制器后,獲得上下橋臂平衡電壓幅值ub,再在θ+π/2角度下進行反park變化,獲得上下橋臂平衡電壓調制波ebj,j=a,b,c;
30、將三相的二倍頻環流分量icirj與0作差后,經過一個比例-諧振控制器,獲得環流抑制電壓的調制波ucirj,j=a,b,c;
31、計算受端換流站上橋臂子模塊平均電壓usmavu,具體為:
32、
33、計算受端換流站下橋臂子模塊平均電壓usmavl,具體為:
34、
35、由正負極直流電壓調制波edcrref+和edcrref-、交流側三相調制電壓ea、eb與ec、環流抑制調制波ucirj、上下橋臂平衡電壓調制波ebj組合生成a相上橋臂、a相下橋臂、b相上橋臂、b相下橋臂、c相上橋臂、c相下橋臂共計六個橋臂的參考電壓;再將a相上橋臂、b相上橋臂及c相上橋臂的參考電壓enuj,j=a,b,c除以上橋臂子模塊平均電壓usmavu,獲取三相上橋臂的插入指數nuj,j=a,b,c;將a相下橋臂、b相下橋臂及c相下橋臂的參考電壓enlj,j=a,b,c除以下橋臂子模塊平均電壓usmavl,獲取三相下橋臂的插入指數nlj,j=a,b,c;
36、對六個橋臂的子模塊電容電壓進行排序,并對橋臂電流進行測量,當橋臂電流為正時,投入電容電壓較低的n個子模塊,當橋臂電流為正時,投入電容電壓較高的n個子模塊,n與該橋臂的插入指數相同。
37、優選地,所述通過分別控制受端換流站上、下橋臂的直流電壓給定值,利用調節和控制后的直流輸電系統正負極的電壓差來映射并傳遞電網頻率,包括:
38、在獲取到電網頻率ωg后,將ωg與額定頻率ω0作差,乘以映射系數kdc后,獲得直流電壓的偏差值△udc,將柔直系統正極直流電壓的額定值udc0+加上△udc,獲得正極直流電壓的參考值udcrref+,將柔直系統負極直流電壓的額定值udc0-減去△udc,獲得負極直流電壓的參考值udcrref-;向受端換流站傳輸正極直流電壓的參考值udcrref+和負極直流電壓的參考值udcrref-;
39、所述在送端換流站,送端換流站感知正負極的直流電壓變化,從中還原出電網頻率,控制海上風電場交流頻率與電網頻率相同,實現電網頻率鏡像,包括:
40、基于接收到的正負極直流電壓,檢測其正極對地電壓udcs+與負極對地電壓udcs-;
41、將正極對地電壓udcs+與負極對地電壓udcs-的作差,再除以映射系數kdc后,從直流電壓中還原出電網頻率變化信息,再加上額定頻率ω0后,作為送端換流站的輸出交流頻率參考值ωref,即實現電網頻率到海上風電場頻率的鏡像映射。
42、根據本發明的第二個方面,提供一種用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像系統,包括:
43、構網自同步與頻率檢測模塊:受端換流站采用構網型控制,通過構建子模塊能量—同步發電機轉子的等價映射來實現電網相位的自同步與電網頻率的感知;
44、基于子模塊解耦的雙極直流電壓獨立解耦控制模塊:基于所述構網自同步與頻率檢測獲得的感知結果,通過交流控制、直流控制和/或均衡調制控制,在受端換流站三相橋臂中注入正序環流,和/或調節上、下橋臂子模塊插入指數中的直流分量,對正負極直流電壓獨立調節和控制;
45、基于雙極差模映射的電網頻率抗擾鏡像控制模塊為:通過分別控制受端換流站上、下橋臂的直流電壓給定值,利用調節和控制后的直流輸電系統正負極的電壓差來映射并傳遞電網頻率;送端換流站感知正負極直流電壓變化,從中還原出電網頻率,控制海上風電場交流頻率與電網頻率相同,實現電網頻率鏡像。
46、根據本發明的第三個方面,提供一種終端,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時可用于執行所述的用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法,或,運行所述的用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像。
47、根據本發明的第四個方面,提供一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時可用于執行所述的用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法,或,運行所述的用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像系統。
48、與現有技術相比,本發明實施例至少具有如下的一項有益效果:
49、本發明實施例中的用于風電接入的構網型柔直系統無通訊抗擾頻率鏡像方法,基于構網模式下感知電網頻率,并對基于子模塊解耦控制的雙極直流電壓獨立解耦控制,然后基于雙極差模映射電網頻率到海上風電場,該頻率鏡像過程抵消線路電阻及電抗上壓降對傳遞精度的影響,實現電網頻率的快速抗擾映射。
- 還沒有人留言評論。精彩留言會獲得點贊!