超局部模型的同步磁阻電機模型預測電流控制方法
本發明屬于高性能同步磁阻電機控制,具體涉及超局部模型的同步磁阻電機模型預測電流控制方法。
背景技術:
1、同步磁阻電機由于結構簡單堅固,制造成本低,無高溫下退磁風險等特點,因此具有良好的應用前景。研究高性能的控制策略可以提升同步磁阻電機的控制性能,擴寬其應用范圍。
2、模型預測控制作為一種新的控制策略,其動態性能優于矢量控制,且穩態性能優于直接轉矩控制,有著很大的發展空間。有限集模型預測電流控制取代了傳統的pi電流環+svpwm的矢量控制結構,將控制對象集中在預測控制的代價函數中,擺脫了傳統的電流環pi控制器的缺點,提高了系統的動態響應。
3、基于閉環磁鏈觀測器的無傳感器控制系統結合了磁鏈的電壓模型和電流模型,通過估計電機定子磁鏈得到電機的轉速和位置信息。低速時電流模型起作用,高速時電壓模型起作用,解決了電機低速時反電動勢小、高速時磁鏈受磁芯損耗影響等問題,擴寬了電機的轉速估計范圍。
4、然而,在同步磁阻電機無傳感器模型預測控制系統中,模型預測電流控制依賴精確的電機模型和參數。系統參數失配會影響電流預測值的準確性,導致通過代價函數選擇的電壓矢量不是最優矢量,從而降低控制系統的魯棒性能。
技術實現思路
1、本發明的目的是提供超局部模型的同步磁阻電機模型預測電流控制方法,解決了現有技術中存在的在非高斯噪音下系統估計精度低和魯棒性差的問題,提高同步磁阻電機預測電流控制的估計精度和魯棒性,實現系統的高性能控制。
2、本發明所采用的技術方案是,超局部模型的同步磁阻電機模型預測電流控制方法,具體按照以下步驟實施:
3、步驟1、分別在兩相旋轉坐標系和兩相靜止坐標系下對同步磁阻電機建模,得到同步磁阻電機的數學模型;
4、步驟2、據步驟1得到的同步磁阻電機數學模型構建磁鏈觀測器,得到轉速的估計值;
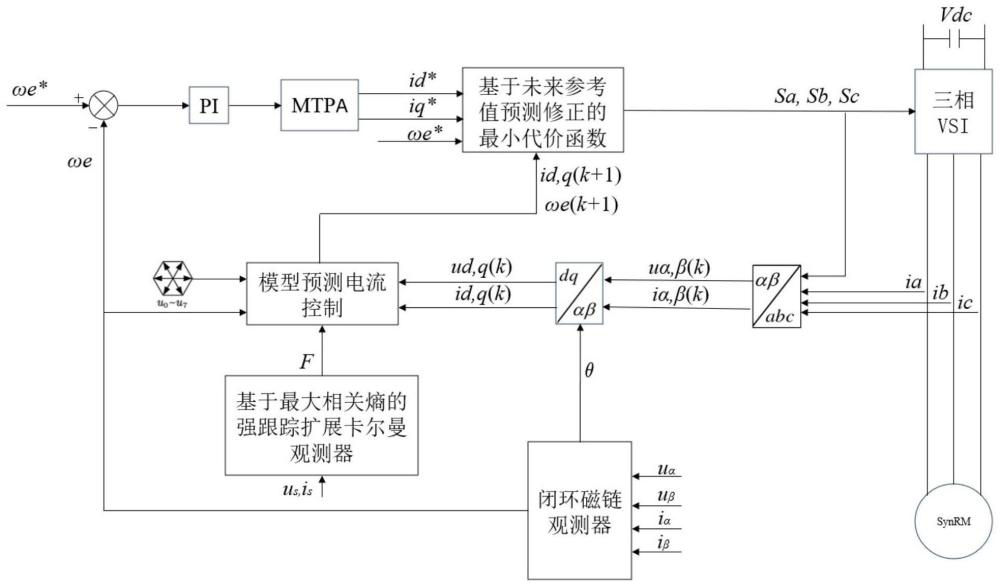
5、步驟3、將電機的定子電流以及步驟2得到的轉速的估計值作為預測輸入,建立傳統的預測模型,然后引入新型超局部模型,設計基于最大相關熵的強跟蹤ekf觀測器,在線估計系統中非線性未知擾動;
6、步驟4、計算最小代價函數值確定所選的最優電壓矢量,控制逆變器開關的通斷,從而達到控制同步磁阻電機的目的。
7、本發明的特點還在于,
8、步驟1具體按照以下步驟實施:
9、建立在兩相旋轉坐標系下同步磁阻電機的數學模型,表達式如下:
10、
11、
12、te=1.5np(ψdiq-ψqid)
13、
14、建立在兩相靜止坐標系下同步磁阻電機的數學模型,表達式如下:
15、
16、
17、式中,ud、uq表示d、q軸定子電壓分量,rs表示定子電阻,id、iq表示d、q軸定子電流分量,ψd、ψq表示d、q軸定子磁鏈分量,ωe表示電角速度,ld、lq表示d、q軸定子電感分量,te表示電磁轉矩,np表示極對數,tl表示負載轉矩,b表示摩擦系數,j表示轉動慣量;uα、uβ表示α、β軸定子電壓分量,iα、iβ表示α、β軸定子電流分量,ψα、ψβ表示α、β軸定子磁鏈分量。
18、步驟2具體按照以下步驟實施:
19、根據磁鏈的電壓模型和電流模型,磁鏈估計的表達式為:
20、
21、式中,表示α、β軸的估計磁鏈,k為校正環節的增益系數,ψαβ表示由磁鏈電流模型計算的α、β軸的磁鏈;
22、根據估計磁鏈得到位置與轉速估計值,表達式如下:
23、
24、
25、式中,表示估計的轉子位置和轉速,表示估計的α、β軸磁鏈,ψd、ψq表示由磁鏈電流模型計算的d、q軸磁鏈。
26、步驟3中傳統的預測模型如下:
27、在同步磁阻電機有限集模型預測電流控制系統中,k+1時刻定子電流和轉速的預測值表達式如下:
28、
29、
30、式中,和表示k+1時刻定子電流和轉速的預測值,ts為采樣時間,ud(k)、uq(k)分別為k時刻選擇的最優電壓矢量在d、q坐標系下的電壓分量。
31、步驟3中超局部電流預測模型如下:
32、作為單輸入單輸出系統,一階新型超局部模型表示為:
33、
34、式中,y為系統輸出,α為模型的比例因子,u為系統輸入,β為線性部分增益,f為系統可觀測的非線性未知擾動部分,f表示未知擾動部分f的變化率;
35、根據同步磁阻電機在兩相旋轉坐標系下的數學模型,構造電流的新型超局部模型,表達式如下:
36、
37、
38、式中,系統的非線性未知擾動部分在d、q坐標系下表示為:
39、
40、
41、步驟3中根據同步磁阻電機電流的新型超局部預測模型,設計基于最大相關熵的強跟蹤ekf觀測器具體如下:
42、最大相關熵準則:
43、相關熵表示兩個隨機變量x和y之間的一種廣義相似度量,其聯合分布函數為fx,y(x,y),二者的相關熵v(x,y)被定義為:
44、
45、其中,e[·,·]表示期望值,為核函數,選擇高斯核函數:
46、
47、式中,e=x-y,σ代表核寬度,且σ>0;
48、采用泰勒級數展開高斯核函數,得到熵為:
49、
50、基于最大相關熵準則的代價函數表示為:
51、
52、式中,e(i)=x(i)-y(i),n表示來自聯合分布函數的n個數據。
53、步驟3中強跟蹤ekf觀測器具體如下:
54、以同步磁阻電機狀態空間方程為基礎,ekf對非線性系統狀態估計的數學形式為:
55、
56、式中,
57、a、b、h——系統矩陣、輸入矩陣、輸出矩陣;
58、x、u、y——狀態變量、輸入變量、輸出變量;
59、w、v——輸入噪音、輸出噪音;
60、使用一階前向差分法進行離散化處理,得:
61、
62、式中,
63、x(k)=[id(k),iq(k),fd(k),fq(k)]t
64、u(k)=[ud(k),uq(k)]t
65、y(k)=[id(k),iq(k)]t
66、將強跟蹤引入傳統ekf算法中,具體過程如下:
67、預測階段:
68、a.計算狀態變量預測值:
69、
70、b.計算誤差協方差矩陣預測值
71、
72、式中,χ(k+1)為引入的漸消因子,表示為:
73、χ(k+1)=diag[χ1(k+1),χ2(k+1),χ3(k+1),χ4(k+1)]
74、計算漸消因子:
75、在強跟蹤ekf觀測器中,為了實現對增益矩陣的求解,需要滿足正交原則,即:
76、
77、其中,εk為輸出的殘差序列,即
78、殘差序列的協方差矩陣e表示為:
79、
80、其中,η為遺忘因子;
81、定義矩陣n和m,關系式如下:
82、
83、其中,γ為弱化因子,
84、通過更新矩陣n和m,求解漸消因子矩陣:
85、
86、其中,
87、
88、式中,ai為根據控制目標特征而確定的先驗常數,b為被求解的待定因子;
89、計算增益矩陣:
90、
91、預測值修正:
92、a.狀態預測值修正
93、
94、b.誤差協方差矩陣預測值修正
95、
96、在上述公式中,“~”表示預測值,“-”表示修正值;
97、將同步磁阻電機離散化的非線性狀態估計表達式,重構成非線性遞推方程的形式,表示為
98、
99、其中,
100、
101、式中,z(k+1)通過cholesky分解得到;
102、設:
103、
104、
105、殘差則重構的非線性遞推方程又表示為:
106、s(k+1)=t(k+1)x(k)+δ(k+1)
107、此時基于最大相關熵準則的預測代價函數表示為:
108、
109、式中,n為s(k+1)的維度,si(k+1)表示s(k+1)的第i個元素,ti(k+1)表示t(k+1)的第i個元素,δi(k+1)表示δ(k+1)=s(k+1)-t(k+1)x(k+1)的第i個元素;
110、令則狀態變量在k+1時刻的最優解為
111、
112、定義權重矩陣為
113、
114、ηp,k+1=diag[gσ[δ1(k+1)],…,gσ[δm(k+1)]]
115、ηr,k+1=diag[gσ[δm+1(k+1)],…,gσ[δn(k+1)]]
116、式中,ηp,k+1和ηr,k+1分別表示誤差協方差矩陣和測量噪聲矩陣的權重矩陣;m、n分別表示誤差協方差矩陣和測量噪聲矩陣的維度;
117、當代價函數j[x(k+1)]最大時,測量值與預測值的誤差最小,得到系統狀態的最優估計,通過ηk+1加權得到新的協方差矩陣,即
118、
119、此時的預測的誤差協方差矩陣和測量誤差協方差矩陣為
120、
121、
122、計算狀態變量預測值和引入漸消因子后的誤差協方差矩陣預測值:
123、
124、
125、計算增益矩陣,則:
126、
127、更新狀態估計和誤差協方差矩陣,如下:
128、
129、
130、由此,根據電流的超局部預測模型得到基于最大相關熵的超局部ekf觀測器,表達式如下:
131、
132、
133、步驟4具體按照以下步驟實施:
134、構建的代價函數表達式如下:
135、
136、式中,和表示k+1時刻定子電流和轉速的預測值,λ為權重因子,將利用上述表達式計算出的代價函數最小值所對應的電壓矢量作為最優電壓矢量進行輸出,控制逆變器開關的通斷。
137、本發明的有益效果是,超局部模型的同步磁阻電機模型預測電流控制方法,通過將基于閉環磁鏈觀測器的無傳感器控制與模型預測電流控制相結合,應用到同步磁阻電機控制中,取代了傳統的位置傳感器以及pi電流控制器+svpwm的矢量控制,節約了系統成本,提高了系統的動態性能與可靠性。在傳統的電流預測控制的代價函數中加入轉速誤差項,可以更好的提高響應速度,提高系統的動態性能。在同步磁阻電機無傳感器模型預測電流控制系統中,引入超局部模型,設計基于最大相關熵準則的強跟蹤ekf觀測器,在線估計系統的非線性未知擾動,解決了系統魯棒性差和在非高斯噪音下非線性系統的狀態估計的問題,提高估計的精度。本發明可以有效解決因電機參數失配導致系統魯棒性能下降的問題,提升了同步磁阻電機無傳感器預測控制系統的控制性能。本發明在保證系統響應速度快的前提下,提出用基于超局部模型的改進ekf觀測器在線估計系統的非線性未知擾動,提高了非線性系統狀態的估計精度,從而提高系統在參數失配工況下的魯棒性能。
- 還沒有人留言評論。精彩留言會獲得點贊!