一種晶圓傳送控制方法、裝置、設備及計算機可讀介質與流程
本發明涉及半導體制造,特別涉及一種晶圓傳送控制方法、裝置、設備及計算機可讀介質。
背景技術:
1、在半導體制造過程中,晶圓傳送是關鍵的環節之一,尤其是對于真空設備,其具有多個工藝腔,晶圓需要按照既定線路將被精準放到相應的工藝腔內。在實際操作中,傳送晶圓的機械臂的實際運動路徑往往與預設路徑存在偏差,造成晶圓不能被準確傳送到位,進而影響加工效果甚至發生碰撞。
技術實現思路
1、為了解決上述現有技術中存在的至少一個技術問題,本發明實施例提供了一種晶圓傳送控制方法、裝置、設備及計算機可讀介質。所述技術方案如下:
2、第一方面,提供了一種晶圓傳送控制方法,包括:
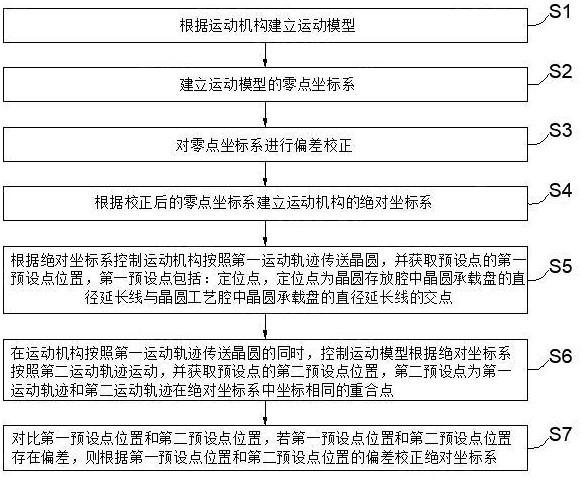
3、根據運動機構建立運動模型;
4、建立所述運動模型的零點坐標系;
5、對所述零點坐標系進行偏差校正;
6、根據校正后的所述零點坐標系建立所述運動機構的絕對坐標系;
7、所述根據所述絕對坐標系控制所述運動機構按照運動軌跡傳送晶圓,包括:
8、根據所述絕對坐標系控制所述運動機構按照第一運動軌跡傳送晶圓,并獲取預設點的第一預設點位置,所述第一預設點包括:定位點,所述定位點為晶圓存放腔中晶圓承載盤的直徑延長線與晶圓工藝腔中晶圓承載盤的直徑延長線的交點;
9、在所述運動機構按照所述第一運動軌跡傳送晶圓的同時,控制所述運動模型根據所述絕對坐標系按照第二運動軌跡運動,并獲取所述預設點的第二預設點位置,所述第二預設點為所述第一運動軌跡和所述第二運動軌跡在所述絕對坐標系中坐標相同的重合點;
10、對比所述第一預設點位置和所述第二預設點位置,若所述第一預設點位置和所述第二預設點位置存在偏差,則根據所述第一預設點位置和所述第二預設點位置的偏差校正所述絕對坐標系。
11、進一步地,所述根據運動機構建立運動模型,包括:
12、根據所述運動機構建立旋轉運動模型和直線運動模型;
13、將所述運動機構的運動形式與所述旋轉運動模型和所述直線運動模型耦合。
14、進一步地,所述建立所述運動模型的零點坐標系,包括:
15、控制所述運動機構的伺服電機回零,建立所述運動模型的零點坐標系。
16、進一步地,所述對所述零點坐標系進行偏差校正,包括:
17、通過微調標定的方式建立所述運動機構的相對坐標系;
18、確定所述零點坐標系與所述相對坐標系的誤差;
19、根據所述誤差對所述零點坐標系進行偏差校正。
20、進一步地,所述通過微調標定的方式建立所述運動機構的相對坐標系,包括:
21、獲取安裝在所述運動機構上的第一傳感器發送的第一零點位置和第二傳感器發送的第二零點位置,根據所述第一零點和所述第二零點確定所述相對坐標系的零點位置,或者
22、通過所述運動機構的伺服電機內編碼的z點確定所述相對坐標系的零點位置;
23、根據所述相對坐標系的零點建立所述相對坐標系。
24、進一步地,所述確定所述零點坐標系與所述相對坐標系的誤差,包括:
25、控制所述運動機構運行到所述零點坐標系的零點,獲取所述零點坐標系的零點位置;
26、根據所述相對坐標系的零點位置和所述零點坐標系的零點位置,確定所述零點坐標系和所述相對坐標系的誤差。
27、進一步地,所述根據校正后的所述零點坐標系建立所述運動機構的絕對坐標系,包括:
28、根據校正后的所述零點坐標系控制所述運動機構運行至預設的標定位置,獲取標定信息;
29、根據所述標定信息建立所述絕對坐標系。
30、第二方面,提供了一種晶圓傳送控制裝置,包括:
31、建模模塊,用于根據運動機構建立運動模型;
32、第一坐標系構建模塊,用于建立所述運動模型的零點坐標系;
33、第一校正模塊,用于對所述零點坐標系進行偏差校正;
34、第二坐標系構建模塊,用于根據校正后的所述零點坐標系建立所述運動機構的絕對坐標系;
35、第一控制模塊,用于根據所述絕對坐標系控制所述運動機構按照第一運動軌跡傳送晶圓,并獲取預設點的第一預設點位置,所述第一預設點包括:定位點,所述定位點為晶圓存放腔中晶圓承載盤的直徑延長線與晶圓工藝腔中晶圓承載盤的直徑延長線的交點;
36、第二控制模塊,用于在所述運動機構按照所述第一運動軌跡傳送晶圓的同時,控制所述運動模型根據所述絕對坐標系按照第二運動軌跡運動,并獲取所述預設點的第二預設點位置,所述第二預設點為所述第一運動軌跡和所述第二運動軌跡在所述絕對坐標系中坐標相同的重合點;
37、第二校正模塊,用于對比所述第一預設點位置和所述第二預設點位置,若所述第一預設點位置和所述第二預設點位置存在偏差,則根據所述第一預設點位置和所述第二預設點位置的偏差校正所述絕對坐標系。
38、進一步地,建模模塊,包括:
39、初步建模模塊,用于根據運動機構建立旋轉運動模型和直線運動模型;
40、耦合模塊,用于將運動機構的運動形式與旋轉運動模型和直線運動模型耦合。
41、進一步地,第一坐標系構建模塊,具體用于:
42、控制運動機構的伺服電機回零,建立運動模型的零點坐標系。
43、進一步地,校正模塊,包括:
44、相對坐標系建立模塊,用于通過微調標定的方式建立運動機構的相對坐標系;
45、誤差確定模塊,用于確定零點坐標系與相對坐標系的誤差;
46、偏差校正模塊,用于根據誤差對零點坐標系進行偏差校正。
47、進一步地,相對坐標系建立模塊,具體用于:
48、獲取安裝在運動機構上的第一傳感器發送的第一零點位置和第二傳感器發送的第二零點位置,根據第一零點和第二零點確定相對坐標系的零點位置;
49、根據所述相對坐標系的零點建立所述相對坐標系。
50、進一步地,相對坐標系建立模塊,具體用于:
51、通過運動機構的伺服電機內編碼的z點確定相對坐標系的零點位置;
52、根據相對坐標系的零點建立相對坐標系。
53、進一步地,誤差確定模塊,具體用于:
54、控制運動機構運行到零點坐標系的零點,獲取零點坐標系的零點位置;
55、根據相對坐標系的零點位置和零點坐標系的零點位置,確定零點坐標系和相對坐標系的誤差。
56、進一步地,第一校正模塊,具體用于:
57、根據校正后的零點坐標系控制運動機構運行至預設的標定位置,獲取標定信息;
58、根據標定信息建立絕對坐標系。
59、第三方面,提供了一種電子設備,包括:
60、一個或多個處理器;以及
61、與所述一個或多個處理器關聯的存儲器,所述存儲器用于存儲程序指令,所述程序指令在被所述一個或多個處理器讀取執行時,執行如第一方面任一所述的方法。
62、第四方面,提供了一種計算機可讀介質,其上存儲有計算機程序,其中,該程序被處理器執行時實現如第一方面任一所述的方法。
63、本發明實施例提供的技術方案帶來的有益效果是:
64、1、本發明實施例公開的晶圓傳送方案實現對晶圓傳送機構的精準控制,能夠避免晶圓在傳送過程中出現誤差,減小晶圓加工損失,提高加工成品率;
65、2、本發明實施例公開的晶圓傳送方案提供了簡單的晶圓傳送偏差校正方法,提高晶圓傳送效率。
- 還沒有人留言評論。精彩留言會獲得點贊!