一種基于車燈圖像的車輛意圖識別方法、系統及云平臺與流程
本技術涉及車輛交互,尤其涉及一種基于車燈圖像的車輛意圖識別方法、系統、云平臺及計算機可讀存儲介質。
背景技術:
1、隨著車輛智能駕駛技術的發展與普及,車輛之間的通信可以增速智能駕駛的實現,也對完全駕駛有幫助,而隨著汽車車燈的不斷發展,不僅僅只有照亮的功能,也可以顯示各種圖片及文字。
2、然而,現在車輛之間的通信主要是通過無線傳輸進行數據交互,由于不同主機廠之間存在通信頻道、傳輸協議、安全保密等內容的不同,導致車輛之間通信難以實現,駕駛人員無法有效識別其他車輛的駕駛意圖,從而導致駕駛安全性降低的問題。
3、因此,現有技術還有待于改進和發展。
技術實現思路
1、本技術的主要目的在于提供一種基于車燈圖像的車輛意圖識別方法、系統、云平臺及計算機可讀存儲介質,旨在解決現有技術中僅通過無線傳輸的方式難以實現車輛之間的通信及數據交互,從而導致駕駛人員無法有效識別其他車輛的駕駛意圖,從而導致駕駛安全性降低的問題。
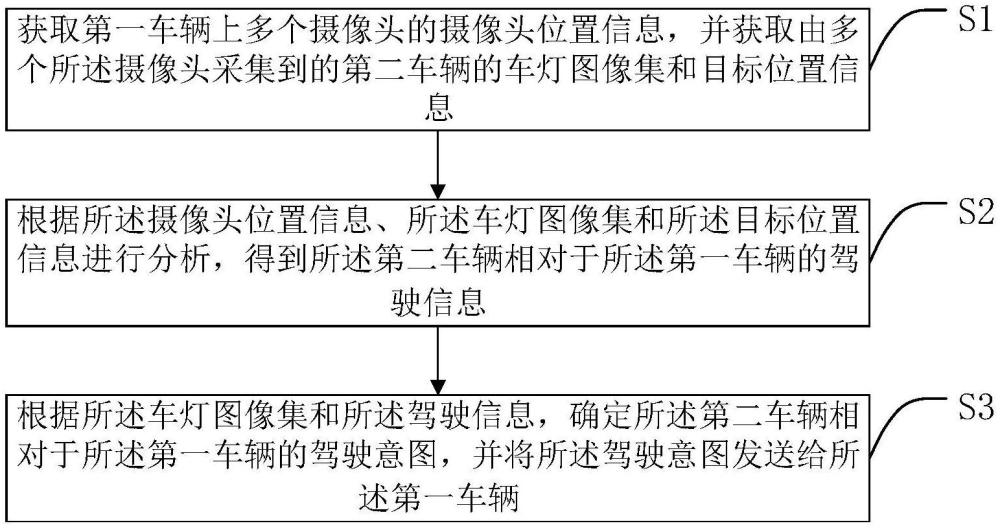
2、本技術第一方面實施例提供一種制方法,包括以下步驟:獲取第一車輛上多個攝像頭的攝像頭位置信息,并獲取由多個所述攝像頭采集到的第二車輛的車燈圖像集和目標位置信息;根據所述攝像頭位置信息、所述車燈圖像集和所述目標位置信息進行分析,得到所述第二車輛相對于所述第一車輛的駕駛信息;根據所述車燈圖像集和所述駕駛信息,確定所述第二車輛相對于所述第一車輛的駕駛意圖,并將所述駕駛意圖發送給所述第一車輛。
3、根據上述技術手段,本技術實施例可以通過車燈圖像采集模塊對目標車輛的車燈圖像數據進行采集、通過車輛識別模塊識別前后方車輛的相對位置、并利用這些車燈圖像數據和相對位置信息對前后方車輛的行駛意圖進行解析,根據對目標車輛的識別結果,提前給當前車輛的駕駛員預警,提示駕駛員目標車輛可能的駕駛意圖,提升駕駛安全性。
4、可選地,在本技術的一個實施例中,所述獲取第一車輛上多個攝像頭的攝像頭位置信息,并獲取由多個所述攝像頭采集到的第二車輛的車燈圖像集和目標位置信息,具體包括:獲取所述第一車輛的多個攝像頭的攝像頭位置信息,其中,所述攝像頭位置信息包括多個所述攝像頭的安裝位置,所述安裝位置包括所述第一車輛的車頭、所述第一車輛的車尾和所述第一車輛的車身;獲取在預設時間內由多個所述攝像頭實時采集到的所述第二車輛的多幅車燈圖像和所述第二車輛的目標位置信息。
5、根據上述技術手段,本技術實施例可以通過第一車輛的多個車燈圖像采集模塊,即攝像頭對前后左右路段中的其他第二車輛的車燈圖像和目標位置信息進行實時采集,這樣第一車輛就能實時獲取到附近車輛的具體信息,再對這些具體信息進行分析后就能獲取其他第二車輛要交互的信息,并對此做出適當的回應,以此達到提高駕駛安全性的目的。
6、可選地,在本技術的一個實施例中,所述分析所有所述車燈圖像,若存在相同的車燈圖像,則保留初次獲取的一幅車燈圖像,并根據保留的多幅車燈圖像構建所述第二車輛的車燈圖像集,具體包括:對所有所述車燈圖像進行初步分析,得到所有所述車燈圖像的圖像數據;若當前獲取的車燈圖像的圖像數據與初次獲取的車燈圖像的圖像數據相同,則刪除當前獲取的車燈圖像,直到所有車燈圖像的圖像數據不存在相同圖像數據;根據保留的多幅所述車燈圖像,構建所述第二車輛的車燈圖像集。
7、根據上述技術手段,本技術實施例可以對收集到的所有車燈圖像進行篩選,并刪除完全相同的車燈圖像,避免后續對相同的車燈圖像進行重復的數據提取及分析,從而達到提高系統資源利用的目的,同時避免相同的數據對第一車輛與第二車輛的交互過程造成影響。
8、可選地,在本技術的一個實施例中,所述根據所述攝像頭位置信息、所述車燈圖像集和所述目標位置信息進行分析,得到所述第二車輛相對于所述第一車輛的駕駛信息,具體包括:通過模式識別算法分析所述車燈圖像集,得到所述車燈圖像集中每個車燈圖像的圖像信息;根據所述攝像頭位置信息、多個所述圖像信息和所述目標位置信息,確定所述第二車輛相對所述第一車輛的駕駛信息;所述駕駛信息包括所述第二車輛與所述第一車輛同向行駛和逆向行駛中的任意一個。
9、根據上述技術手段,本技術實施例可以通過車輛識別模塊對車燈圖像集中的每個車燈圖像進行分析,應用模式識別算法判斷第二車輛與第一車輛之間的方位信息,以更有效地分析第二車輛的車燈圖像想表達的,相對于第一車輛交互信息,從而提高車輛之間的交互準確性。
10、可選地,在本技術的一個實施例中,所述根據所述攝像頭位置信息、多個所述圖像信息和所述目標位置信息,確定所述第二車輛相對所述第一車輛的駕駛信息,具體包括:若所述車頭的車頭攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車頭,則判定所述第一車輛與所述第二車輛逆向行駛;若所述車頭的車頭攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車尾,則判斷所述第一車輛與所述第二車輛同向行駛;若所述車尾的車尾攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車頭,則判斷所述第一車輛與所述第二車輛同向行駛;若所述車尾的車尾攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車尾,則判斷所述第一車輛與所述第二車輛逆向行駛。
11、根據上述技術手段,本技術實施例在得到第二車輛相對于第一車輛的多種駕駛信息后,若采集的車燈圖像是第二車輛的車尾,且判斷出第一車輛和第二車輛逆向行駛,此時第二車輛對第一車輛的駕駛并不會產生影響,不需要對這一情況的駕駛信息分析,避免造成資源浪費。
12、可選地,在本技術的一個實施例中,所述根據所述車燈圖像集所述駕駛信息,確定所述第二車輛相對于所述第一車輛的駕駛意圖,并將所述駕駛意圖發送給所述第一車輛,具體包括:構建初始信息分析模型,將所述車燈圖像集和所述駕駛信息輸入到所述初始信息分析模型進行訓練,得到訓練好的信息分析模型;將所述車燈圖像集中每個車燈圖像的圖像信息和所述駕駛信息輸入到所述信息分析模型,輸出所述第二車輛向所述第一車輛傳遞的駕駛意圖,并將所述駕駛意圖發送給所述第一車輛;其中,所述駕駛意圖包括:變道、左轉、右轉、倒車、停車和加速。
13、根據上述技術手段,本技術實施例在得到了第二車輛相對于第一車輛的駕駛信息的基礎上,利用信息分析模型對車燈圖像集進行分析,得到第二車輛相對于第一車輛的駕駛意圖,從而提示第一車輛做出相應的交互行為,以達到提高道路駕駛安全性的目的。
14、可選地,在本技術的一個實施例中,所述根據所述車燈圖像集和所述駕駛信息,確定所述第二車輛相對于所述第一車輛的駕駛意圖,并將所述駕駛意圖發送給所述第一車輛,之后還包括:將多個第二車輛的所述駕駛意圖進行數據整合,得到多個數據整合包,并保存在數據庫中;將多個所述數據整合包輸入到所述信息分析模型中進行訓練,對信息分析模型進行優化。
15、根據上述技術手段,本技術實施例在完成對車輛之間的交互之后,還會對交互結果進行存儲,對數據進行整合,用于對信息分析模型進行優化并與后續獲取的數據進行分析對比,以提高對第二車輛的車燈圖像的分析能力,提高駕駛意圖預測的準確性。
16、本技術第二方面實施例提供一種基于車燈圖像的車輛意圖識別系統,所述基于車燈圖像的車輛意圖識別系統包括:信息獲取模塊,用于獲取第一車輛上多個攝像頭的攝像頭位置信息,并獲取由多個所述攝像頭采集到的第二車輛的車燈圖像集和目標位置信息;車輛識別模塊,用于根據所述攝像頭位置信息、所述車燈圖像集和所述目標位置信息進行分析,得到所述第二車輛相對于所述第一車輛的駕駛信息;駕駛意圖生成模塊,用于根據所述車燈圖像集和所述駕駛信息,確定所述第二車輛相對于所述第一車輛的駕駛意圖,并將所述駕駛意圖發送給所述第一車輛。
17、可選地,在本技術的一個實施例中,所述信息獲取模塊包括:安裝位置信息獲取單元,用于獲取所述第一車輛的多個攝像頭的攝像頭位置信息,其中,所述攝像頭位置信息包括多個所述攝像頭的安裝位置,所述安裝位置包括所述第一車輛的車頭、所述第一車輛的車尾和所述第一車輛的車身;目標位置信息獲取單元,用于獲取在預設時間內由多個所述攝像頭實時采集到的所述第二車輛的多幅車燈圖像和所述第二車輛的目標位置信息;車燈圖像集獲取單元,用于分析所有所述車燈圖像,若存在相同的車燈圖像,則保留初次獲取的一幅車燈圖像,并根據保留的多幅車燈圖像構建所述第二車輛的車燈圖像集。
18、可選地,在本技術的一個實施例中,所述車燈圖像集獲取單元包括:圖像數據獲取子單元,用于對所有所述車燈圖像進行初步分析,得到所有所述車燈圖像的圖像數據;圖像數據篩選子單元,用于若當前獲取的車燈圖像的圖像數據與初次獲取的車燈圖像的圖像數據相同,則刪除當前獲取的車燈圖像,直到所有車燈圖像的圖像數據不存在相同圖像數據;車燈圖像集構建子單元,用于根據保留的多幅所述車燈圖像,構建所述第二車輛的車燈圖像集。
19、可選地,在本技術的一個實施例中,所述車輛識別模塊包括:圖像信息獲取單元,用于通過模式識別算法分析所述車燈圖像集,得到所述車燈圖像集中每個車燈圖像的圖像信息;駕駛信息獲取單元,用于根據所述攝像頭位置信息、多個所述圖像信息和所述目標位置信息,確定所述第二車輛相對所述第一車輛的駕駛信息;所述駕駛信息包括所述第二車輛與所述第一車輛同向行駛和逆向行駛中的任意一個。
20、可選地,在本技術的一個實施例中,所述駕駛信息獲取單元包括:第一駕駛信息判斷子單元,用于若所述車頭的車頭攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車頭,則判定所述第一車輛與所述第二車輛逆向行駛;第二駕駛信息判斷子單元,用于若所述車頭的車頭攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車尾,則判斷所述第一車輛與所述第二車輛同向行駛;第三駕駛信息判斷子單元,用于若所述車尾的車尾攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車頭,則判斷所述第一車輛與所述第二車輛同向行駛;第四駕駛信息判斷子單元,用于若所述車尾的車尾攝像頭采集到的所述車燈圖像對應的所述圖像信息為所述第二車輛的車尾,則判斷所述第一車輛與所述第二車輛逆向行駛。
21、可選地,在本技術的一個實施例中,所述駕駛意圖生成模塊包括:信息分析模型構建單元,用于構建初始信息分析模型,將所述車燈圖像集和所述駕駛信息輸入到所述初始信息分析模型進行訓練,得到訓練好的信息分析模型;駕駛意圖獲取單元,用于將所述車燈圖像集中每個車燈圖像的圖像信息和所述駕駛信息輸入到所述信息分析模型,輸出所述第二車輛向所述第一車輛傳遞的駕駛意圖,并將所述駕駛意圖發送給所述第一車輛;其中,所述駕駛意圖包括:變道、左轉、右轉、倒車、停車和加速。
22、可選地,在本技術的一個實施例中,所述基于車燈圖像的車輛意圖識別系統還包括:模型優化模塊,用于將多個第二車輛的所述駕駛意圖進行數據整合,得到多個數據整合包,并保存在數據庫中;將多個所述數據整合包輸入到所述信息分析模型中進行訓練,對信息分析模型進行優化。
23、本技術第三方面實施例提供一種云平臺,所述云平臺包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的基于車燈圖像的車輛意圖識別系統的控制程序,所述基于車燈圖像的車輛意圖識別系統的控制程序被所述處理器執行時實現如上述實施例所述的基于車燈圖像的車輛意圖識別系統的控制方法的步驟。
24、本技術第四方面實施例提供一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有基于車燈圖像的車輛意圖識別系統的控制程序,所述基于車燈圖像的車輛意圖識別系統的控制程序被處理器執行時實現如上述實施例所述的基于車燈圖像的車輛意圖識別系統的控制方法的步驟。
25、本技術的有益效果:
26、(1)本技術實施例可以通過車燈圖像采集模塊對目標車輛的車燈圖像數據進行采集、通過車輛識別模塊識別前后方車輛的相對位置、并利用這些車燈圖像數據和相對位置信息對前后方車輛的行駛意圖進行解析,根據對目標車輛的識別結果,提前給當前車輛的駕駛員預警,提示駕駛員目標車輛可能的駕駛意圖,提升駕駛安全性。
27、(2)本技術實施例可以對收集到的所有車燈圖像進行篩選,并刪除完全相同的車燈圖像,避免后續對相同的車燈圖像進行重復的數據提取及分析,從而達到提高系統資源利用的目的,同時避免相同的數據對第一車輛與第二車輛的交互過程造成影響,并通過車輛識別模塊對車燈圖像集中的每個車燈圖像進行分析,應用模式識別算法判斷第二車輛與第一車輛之間的方位信息,以更有效地分析第二車輛的車燈圖像想表達的,相對于第一車輛交互信息,從而提高車輛之間的交互準確性。
28、(3)本技術實施例可以在得到第二車輛相對于第一車輛的多種駕駛信息后,若采集的車燈圖像是第二車輛的車尾,且判斷出第一車輛和第二車輛逆向行駛,此時第二車輛對第一車輛的駕駛并不會產生影響,不需要對這一情況的駕駛信息分析,避免造成資源浪費,在得到了第二車輛相對于第一車輛的駕駛信息的基礎上,利用信息分析模型對車燈圖像集進行分析,得到第二車輛相對于第一車輛的駕駛意圖,從而提示第一車輛做出相應的交互行為,以達到提高道路駕駛安全性的目的。
29、(4)本技術實施例可以在完成對車輛之間的交互之后,還會對交互結果進行存儲,對數據進行整合,用于對信息分析模型進行優化并與后續獲取的數據進行分析對比,以提高對第二車輛的車燈圖像的分析能力,提高駕駛意圖預測的準確性。
30、本技術附加的方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本技術的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!