交通風險值的確定方法、裝置、電子設備和存儲介質與流程
本技術屬于車輛安全行駛,尤其涉及一種交通風險值的確定方法、裝置、電子設備和存儲介質。
背景技術:
1、車輛在行駛過程中,會由于各種各樣的原因,導致事故的發生。
2、在現有技術中,為了防止事故的發生,往往是對駕駛員的駕駛行為進行分析,例如駕駛員疲勞駕駛、超速行駛等行為,或者是對相鄰車輛的駕駛行為進行風險分析,分析的數據過于單一,風險分析結果不夠準確。例如,在車輛行駛到某段道路的時候,現有技術無法判斷該道路是否存在安全風險,不能有效保障用戶的安全。
3、因此,現有技術存在的問題是:風險分析的準確性差,不能有效保障用戶的安全。
技術實現思路
1、本技術實施例提供了一種交通風險值的確定方法、裝置、電子設備和存儲介質,解決了風險分析的準確性差,不能有效保障用戶的安全的問題。
2、第一方面,本技術實施例提供了一種交通風險值的確定方法,包括:
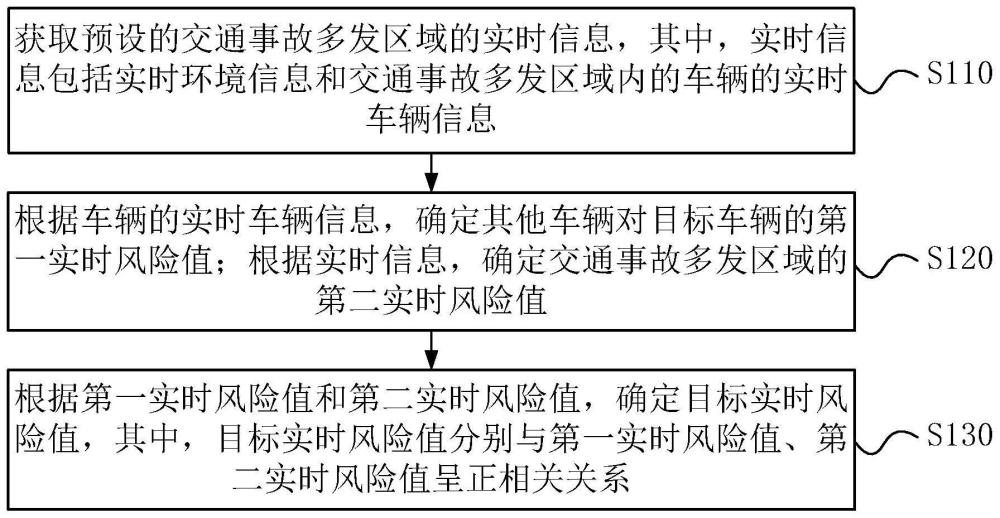
3、獲取預設的交通事故多發區域的實時信息,其中,實時信息包括實時環境信息和交通事故多發區域內的車輛的實時車輛信息;
4、根據車輛的實時車輛信息,確定其他車輛對目標車輛的第一實時風險值;根據實時信息,確定交通事故多發區域的第二實時風險值;
5、根據第一實時風險值和第二實時風險值,確定目標實時風險值,其中,目標實時風險值分別與第一實時風險值、第二實時風險值呈正相關關系。
6、在一些可能的實現方式中,實時車輛信息包括位置信息和速度信息;根據車輛的實時車輛信息,確定其他車輛對目標車輛的第一實時風險值,包括:
7、根據位置信息和速度信息,計算目標車輛與其他車輛之間的相對信息,相對信息包括相對速度和相對距離;
8、將相對速度除以相對距離,得到第一實時風險值。
9、在一些可能的實現方式中,根據實時信息,確定交通事故多發區域的第二實時風險值,包括:
10、根據實時信息,確定交通事故多發區域內每個車輛的實時風險貢獻值;
11、將每個車輛的實時風險貢獻值相加,得到交通事故多發區域的第二實時風險值。
12、在一些可能的實現方式中,該方法還包括:
13、判斷實時信息是否滿足預設的多個觸發條件中的目標觸發條件;
14、在滿足目標觸發條件的情況下,將預設的高風險值作為交通事故多發區域的第二實時風險值。
15、在一些可能的實現方式中,實時車輛信息包括車型信息和載重信息;根據第一實時風險值和第二實時風險值,確定目標實時風險值,包括:
16、將第二實時風險值與車型風險值相加,得到第三實時風險值,其中,車型風險值基于車型信息和載重信息得到;
17、分別將第一實時風險值與第三實時風險值相乘,得到多個第四實時風險值;
18、將多個第四實時風險值相加,得到目標實時風險值。
19、在一些可能的實現方式中,在判斷實時信息是否滿足預設的多個觸發條件中的目標觸發條件之前,該方法還包括:
20、獲取交通事故多發區域內發生的歷史事故的歷史情況信息和歷史原因的信息,其中,歷史情況信息包括事故發生前預設時間段內的歷史環境信息和每臺歷史風險車輛的歷史車輛信息;
21、根據歷史情況信息,分析歷史事故發生的潛在原因;
22、基于潛在原因和歷史原因,生成觸發歷史事故的觸發條件。
23、在一些可能的實現方式中,在獲取交通事故多發區域內發生的歷史事故的歷史情況信息和歷史原因的信息之前,該方法還包括:
24、獲取交通事故多發區域內發生的歷史事故的歷史車輛信息;
25、在預設的車輛信息與權重的對應關系中,獲取歷史事故的歷史車輛信息對應的目標權重;
26、根據目標權重,確定每臺歷史車輛的風險貢獻值;
27、確定大于預設的貢獻閾值的風險貢獻值,為目標風險貢獻值;
28、將目標風險貢獻值對應的歷史車輛,作為歷史風險車輛。
29、在一些可能的實現方式中,該方法還包括:
30、在目標實時風險值大于預設的風險閾值的情況下,向目標車輛發送預警提醒信息。
31、在一些可能的實現方式中,在獲取預設的交通事故多發區域的實時信息之前,該方法還包括:
32、根據事故發生的數量,劃定電子圍欄,得到交通事故多發區域。
33、第二方面,本技術實施例還提供了一種交通風險值的確定裝置,包括:
34、獲取模塊,用于獲取預設的交通事故多發區域的實時信息,其中,實時信息包括實時環境信息和交通事故多發區域內的車輛的實時車輛信息;
35、確定模塊,用于根據車輛的實時車輛信息,確定其他車輛對目標車輛的第一實時風險值;確定模塊還用于根據實時信息,確定交通事故多發區域的第二實時風險值;
36、確定模塊,還用于根據第一實時風險值和第二實時風險值,確定目標實時風險值,其中,目標實時風險值分別與第一實時風險值、第二實時風險值呈正相關關系。
37、在一些可能的實現中,實時車輛信息包括位置信息和速度信息;確定模塊用于根據車輛的實時車輛信息,確定其他車輛對目標車輛的第一實時風險值,包括:
38、計算單元,用于根據位置信息和速度信息,計算目標車輛與其他車輛之間的相對信息,相對信息包括相對速度和相對距離;
39、計算單元,還用于將相對速度除以相對距離,得到第一實時風險值。
40、在一些可能的實現方式中,確定模塊還用于根據實時信息,確定交通事故多發區域的第二實時風險值,包括:
41、確定單元,用于根據實時信息,確定交通事故多發區域內每個車輛的實時風險貢獻值;
42、計算單元,用于將每個車輛的實時風險貢獻值相加,得到交通事故多發區域的第二實時風險值。
43、在一些可能的實現中,該裝置還包括判斷模塊:
44、判斷模塊,用于判斷實時信息是否滿足預設的多個觸發條件中的目標觸發條件;
45、判斷模塊,還用于在滿足目標觸發條件的情況下,將預設的高風險值作為交通事故多發區域的第二實時風險值。
46、在一些可能的實現中,實時車輛信息包括車型信息和載重信息;確定模塊還用于根據第一實時風險值和第二實時風險值,確定目標實時風險值,包括:
47、計算單元,用于將第二實時風險值與車型風險值相加,得到第三實時風險值,其中,車型風險值基于車型信息和載重信息得到;
48、計算單元,還用于分別將第一實時風險值與第三實時風險值相乘,得到多個第四實時風險值;
49、計算單元,還用于將多個第四實時風險值相加,得到目標實時風險值。
50、在一些可能的實現中,在判斷實時信息是否滿足預設的多個觸發條件中的目標觸發條件之前,該裝置還包括分析模塊、生成模塊:
51、獲取模塊,用于獲取交通事故多發區域內發生的歷史事故的歷史情況信息和歷史原因的信息,其中,歷史情況信息包括事故發生前預設時間段內的歷史環境信息和每臺歷史風險車輛的歷史車輛信息;
52、分析模塊,用于根據歷史情況信息,分析歷史事故發生的潛在原因;
53、生成模塊,用于基于潛在原因和歷史原因,生成觸發歷史事故的觸發條件。
54、在一些可能的實現中,在獲取模塊用于獲取交通事故多發區域內發生的歷史事故的歷史情況信息和歷史原因的信息之前,該裝置還包括:
55、獲取模塊,用于獲取交通事故多發區域內發生的歷史事故的歷史車輛信息;
56、獲取模塊,還用于在預設的車輛信息與權重的對應關系中,獲取歷史事故的歷史車輛信息對應的目標權重;
57、確定模塊,用于根據目標權重,確定每臺歷史車輛的風險貢獻值;
58、確定模塊,還用于確定大于預設的貢獻閾值的風險貢獻值,為目標風險貢獻值;
59、確定模塊,還用于將目標風險貢獻值對應的歷史車輛,作為歷史風險車輛。
60、在一些可能的實現中,該裝置還包括:
61、在目標實時風險值大于預設的風險閾值的情況下,向目標車輛發送預警提醒信息。
62、在一些可能的實現中,在獲取模塊用于獲取預設的交通事故多發區域的實時信息之前,該裝置還包括劃定模塊:
63、劃定模塊,用于根據事故發生的數量,劃定電子圍欄,得到交通事故多發區域。
64、第三方面,本技術實施例還提供了一種電子設備,該電子設備包括處理器以及存儲有計算機程序指令的存儲器;處理器執行計算機程序指令時實現第一方面,或第一方面中的任一可能實現方式中的交通風險值的確定方法。
65、第四方面,本技術實施例還提供了一種計算機存儲介質,計算機可讀存儲介質上存儲有計算機程序指令,計算機程序指令被處理器執行時實現第一方面,或第一方面中的任一可能實現方式中的交通風險值的確定方法。
66、第五方面,本技術實施例提供了一種計算機程序產品,計算機程序產品中的指令由電子設備的處理器執行時,使得電子設備能夠執行第一方面,或第一方面中的任一可能實現方式中的交通風險值的確定方法。
67、本技術實施例的交通風險值的確定方法、裝置、電子設備和存儲介質,通過獲取預設的交通事故多發區域的實時信息,該實時信息可以包括實時環境信息和交通事故多發區域內的車輛的實時車輛信息,然后根據車輛的實時車輛信息,可以確定其他車輛對目標車輛的第一實時風險值,同時根據實時信息,可以確定交通事故多發區域的第二實時風險值,接著根據第一實時風險值和第二實時風險值,可以確定目標實時風險值,該目標實時風險值分別與第一實時風險值和第二實時風險值呈正相關關系。通過車輛的實時車輛信息,可以確定其他車輛對目標車輛的第一實時風險值,通過每臺車輛的實時車輛信息和實時環境信息,可以確定交通事故多發區域的第二實時風險值,在第一實時風險值或第二實時風險值增大的情況下,目標實時風險值就會隨之增大,不僅分析了相鄰車輛的駕駛行為,還能判斷某段道路是否存在安全風險,提高了風險分析的準確性,可以有效保障用戶的安全。
- 還沒有人留言評論。精彩留言會獲得點贊!