一種基于非侵入式量測的水輪機可解釋故障檢測方法
本發明屬于旋轉機械故障檢測,具體涉及一種基于非侵入式量測的水輪機可解釋故障檢測方法。
背景技術:
1、水輪機作為水電站的核心設備,其通過將水體的重力勢能轉換為動能從而帶動發電機旋轉產生電能,在電網系統中起到調峰、調相和事故備用的作用。由于水輪機長時間服役于復雜惡劣水流工況環境下,水流中的泥沙等雜質不可避免的會對葉片表面造成沖蝕磨損,使葉片表面變得粗糙,降低水輪機的發電效率。此外,葉片表面長期磨損將導致葉片厚度減小,影響葉片的結構強度,使得葉片發生變形,進而導致水輪機發生故障。一旦機組出現故障,輕則停機,影響電站經濟效益,重則導致巨大的財產損失與人員傷亡。因此,研究一種有效可靠的水輪機故障檢測方法,對于及時發現水輪機潛在故障,保障機組動態性能和維持電網安全具有重要工程意義。
2、現有的水輪機故障檢測方法大致可分為基于信號處理方法,例如參考文獻:y.xin,?s.?li,?z.?zhang,?z.?an?and?j.?wang,?adaptive?reinforced?empirical?morletwavelet?transform?and?its?application?in?fault?diagnosis?of?rotatingmachinery(自適應增強經驗型莫萊特小波變換及其在旋轉機械故障診斷中的應用),?inieee?access,?vol.?7,?pp.?65150-65162,?2019和基于數據驅動方法,例如參考文獻:wang?h,?liu?x,?ma?l,?et?al.?anomaly?detection?for?hydropower?turbine?unitbased?on?variational?modal?decomposition?and?deep?autoencoder[j].?energyreports(基于變分模態分解和深度自動編碼器的水電機組異常檢測),?7:?938-946,2021。其中,基于信號處理方法可分為時域、頻域和時頻域方法。由于水輪機服役環境的復雜性以及噪聲的干擾,導致基于信號處理方法難以有效提取故障特征以及建立精確的故障檢測模型。基于數據驅動方法通過自適應地提取隱藏在測量數據中的故障信息,以實現設備故障的有效檢測。然而,以深度學習方法為代表的數據驅動方法,其多層非線性映射導致網絡具有“黑盒”特性,模型缺乏可解釋性。另一方面,以振動信號為代表的侵入式測量具有諸如通信協議不一致、安裝空間受限以及對設備造成損壞并影響系統穩定性等缺陷。此外,由于水輪機在運行過程中,其轉速和負載是不斷變化的,使得監測信號不再具有周期性,同時也會給監測信號帶來調頻、調幅和調相等非平穩特征,所以導致面向恒工況場景的故障檢測方法不再適用。
技術實現思路
1、本發明的目的在于提供一種基于非侵入式量測的水輪機可解釋故障檢測方法,增強了模型的可解釋性,并且提高了故障檢測在變工況條件下的泛化能力和適用性。
2、為實現上述目的,本發明所采取的技術方案為:
3、一種基于非侵入式量測的水輪機可解釋故障檢測方法,所述基于非侵入式量測的水輪機可解釋故障檢測方法,包括:
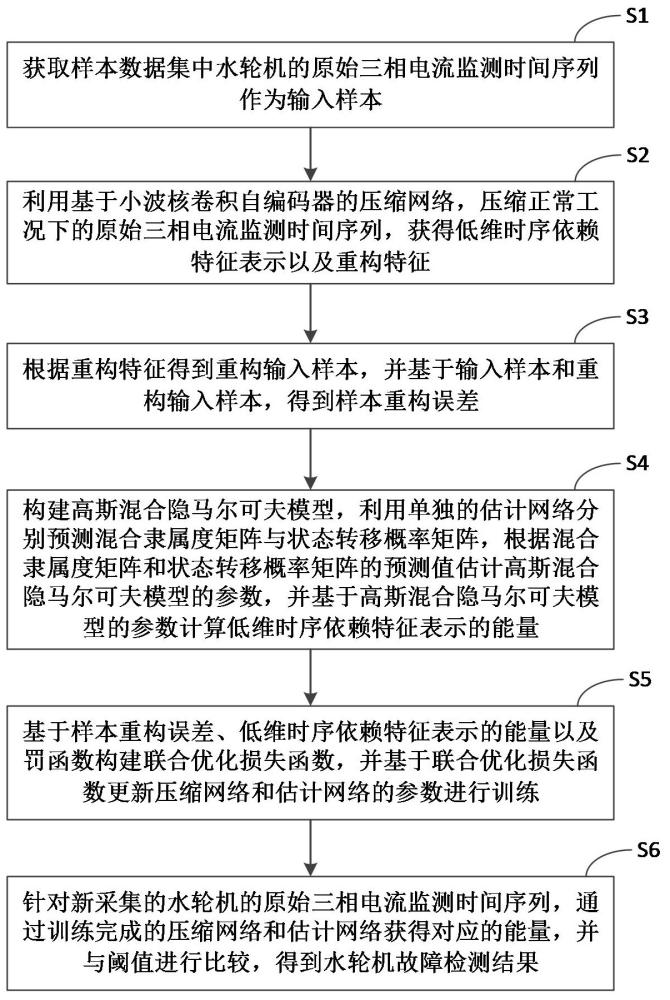
4、獲取樣本數據集中水輪機的原始三相電流監測時間序列作為輸入樣本;
5、利用基于小波核卷積自編碼器的壓縮網絡,壓縮正常工況下的原始三相電流監測時間序列,獲得低維時序依賴特征表示以及重構特征;
6、根據重構特征得到重構輸入樣本,并基于輸入樣本和重構輸入樣本,得到樣本重構誤差;
7、構建高斯混合隱馬爾可夫模型,利用單獨的估計網絡分別預測混合隸屬度矩陣與狀態轉移概率矩陣,根據混合隸屬度矩陣和狀態轉移概率矩陣的預測值估計高斯混合隱馬爾可夫模型的參數,并基于高斯混合隱馬爾可夫模型的參數計算低維時序依賴特征表示的能量;
8、基于樣本重構誤差、低維時序依賴特征表示的能量以及罰函數構建聯合優化損失函數,并基于聯合優化損失函數更新壓縮網絡和估計網絡的參數進行訓練;
9、針對新采集的水輪機的原始三相電流監測時間序列,通過訓練完成的壓縮網絡和估計網絡獲得對應的能量,并與閾值進行比較,得到水輪機故障檢測結果。
10、以下還提供了若干可選方式,但并不作為對上述總體方案的額外限定,僅僅是進一步的增補或優選,在沒有技術或邏輯矛盾的前提下,各可選方式可單獨針對上述總體方案進行組合,還可以是多個可選方式之間進行組合。
11、作為優選,所述利用基于小波核卷積自編碼器的壓縮網絡,壓縮正常工況下的原始三相電流監測時間序列,獲得低維時序依賴特征表示以及重構特征,包括:
12、給定樣本數據集中水輪機的原始三相電流監測時間序列,經過小波核卷積的特征提取過程表示為:
13、;
14、其中,表示樣本數據集中的第個輸入樣本,表示樣本數據集中輸入樣本的總個數,表示輸入樣本經過小波核卷積后的樣本特征,表示小波核卷積層,表示小波核卷積層內的權值參數;
15、小波核卷積后的樣本特征經過1-d卷積操作后被映射到高維特征空間,用公式表示為:
16、;
17、其中,表示1-d卷積神經網絡,表示1-d卷積神經網絡的權重參數,表示1-d卷積神經網絡針對樣本特征提取到的樣本顯著特征;
18、對于樣本顯著特征,經過壓縮網絡獲得的低維時序依賴特征表示和重構特征表示為:
19、;
20、;
21、其中,是壓縮網絡在低維空間上學習到樣本顯著特征的低維時序依賴特征表示,低維時序依賴特征表示的維數記為,和分別是壓縮網絡中編碼器和解碼器的權重參數,表示樣本顯著特征的重構特征,表示編碼器,表示解碼器。
22、作為優選,所述根據重構特征得到重構輸入樣本,并基于輸入樣本和重構輸入樣本,得到樣本重構誤差,包括:
23、對于樣本顯著特征的重構特征,則輸入樣本的重構表示為:
24、;
25、式中,表示1-d轉置卷積神經網絡,表示1-d轉置卷積神經網絡的權重參數,表示重構輸入樣本;
26、則計算原始三相電流監測時間序列對應的樣本重構誤差如下:
27、;
28、式中,表示第個輸入樣本對應的樣本重構誤差。
29、作為優選,所述構建高斯混合隱馬爾可夫模型,包括:
30、將變工況條件下的水輪機運轉過程描述為有隱藏狀態的隱馬爾可夫鏈和服從高斯混合分布隨機觀測序列的雙重隨機過程,取觀測序列長度為,隱藏狀態的數量為,高斯分布的數量為,則高斯混合隱馬爾可夫模型的參數集表示為:
31、;
32、其中,表示高斯混合隱馬爾可夫模型的初始狀態概率矩陣,表示高斯混合隱馬爾可夫模型的狀態轉移概率矩陣,表示高斯混合隱馬爾可夫模型的混合概率矩陣,表示高斯混合隱馬爾可夫模型的均值矩陣,表示高斯混合隱馬爾可夫模型的協方差矩陣,表示高斯混合隱馬爾可夫模型的參數集。
33、作為優選,所述估計網絡為多層神經網絡,所述利用單獨的估計網絡分別預測混合隸屬度矩陣與狀態轉移概率矩陣,包括:
34、;
35、;
36、其中,和分別對應兩個多層神經網絡的權重參數,表示給定低維時序依賴特征表示下的狀態轉移概率矩陣的預測值,表示給定低維時序依賴特征表示下的混合隸屬度矩陣的預測值,和分別表示多層神經網絡和激活函數。
37、作為優選,所述根據混合隸屬度矩陣和狀態轉移概率矩陣的預測值估計高斯混合隱馬爾可夫模型的參數,包括:
38、;
39、;
40、;
41、;
42、;
43、式中,表示隱藏狀態為時初始狀態概率的估計值,表示中隱藏狀態為時第個高斯分布擬合的混合隸屬度的預測值,,,組合個得到高斯混合隱馬爾可夫模型的初始狀態概率矩陣的估計值,表示隱藏狀態從到時狀態轉移概率的估計值,表示樣本數據集中輸入樣本的總個數,表示中隱藏狀態從到時狀態轉移概率的預測值,,組合個得到高斯混合隱馬爾可夫模型的狀態轉移概率矩陣的估計值,表示隱藏狀態為時第個高斯分布擬合的混合概率的估計值,組合個得到高斯混合隱馬爾可夫模型的混合概率矩陣的估計值,表示隱藏狀態為時第個高斯分布擬合的均值的估計值,表示低維時序依賴特征表示,組合個得到高斯混合隱馬爾可夫模型的均值矩陣的估計值,表示隱藏狀態為時第個高斯分布擬合的協方差的估計值,為一個對角矩陣,表示轉置,組合個得到高斯混合隱馬爾可夫模型的協方差矩陣的估計值,最終得到估計的高斯混合隱馬爾可夫模型的參數集為。
44、作為優選,所述基于高斯混合隱馬爾可夫模型的參數計算低維時序依賴特征表示的能量,包括:
45、第個輸入樣本對應的低維時序依賴特征表示,在給定估計的高斯混合隱馬爾可夫模型的參數集下的條件概率為:
46、;
47、則計算低維時序依賴特征表示的能量為:
48、;
49、其中,表示在估計的高斯混合隱馬爾可夫模型的參數集下,到第個觀測序列的概率,表示給定隱藏狀態時隱藏狀態的狀態轉移概率估計值,為給定隱藏狀態時隱藏狀態的觀測概率估計值,為低維時序依賴特征表示的能量,表示給定樣本序列,關于估計的高斯混合隱馬爾可夫模型的參數集的似然函數,表示給定估計的高斯混合隱馬爾可夫模型的參數集后觀測序列為的概率。
50、作為優選,所述基于樣本重構誤差、低維時序依賴特征表示的能量以及罰函數構建聯合優化損失函數,包括:
51、;
52、其中,表示聯合優化損失函數,表示待優化的權重參數,表示樣本數據集中輸入樣本的總個數,表示第個輸入樣本對應的樣本重構誤差,表示樣本數據集中的第個輸入樣本,表示第個輸入樣本對應的重構輸入樣本,為能量的加權系數,為罰函數的加權系數,為第個輸入樣本對應的低維時序依賴特征表示的能量,為罰函數,表示為:
53、;
54、式中,表示高斯混合隱馬爾可夫模型的協方差矩陣的估計值,為高斯混合隱馬爾可夫模型的隱藏狀態的數量,?為高斯混合隱馬爾可夫模型的高斯分布的數量,表示由壓縮網絡生成的低維時序依賴特征表示的維數,表示隱藏狀態為時第個高斯分布擬合的協方差的估計值,為一個對角矩陣,表示對角矩陣中第行第列的協方差值。
55、作為優選,所述閾值取樣本數據集中所有樣本的第5個百分位數,若新采集的水輪機的原始三相電流監測時間序列對應的能量大于閾值,則判定處于正常工況;反之則處于異常工況。
56、本發明提供的一種基于非侵入式量測的水輪機可解釋故障檢測方法,與現有技術相比,具有以下有益效果:
57、1、提出了一種基于非侵入量測的故障檢測方法,充分利用了設備內置傳感信息,避免了侵入式量測對設備造成的損傷,提高了設備的穩定性。
58、2、提出了一種小波核卷積自編碼器,獲得了輸入樣本的低維時序依賴特征表示,從而將高維故障檢測任務轉化為低維概率密度估計任務,增強了模型的可解釋性。
59、3、引入隱馬爾可夫模型,將復雜變工況過程描述為一種隱藏狀態為未知工況、且觀測序列僅與工況狀態相關的馬爾可夫過程,提高故障檢測在變工況條件下的泛化能力和適用性。
60、4、設計了聯合優化損失函數,促進了小波核卷積自編碼器和高斯混合隱馬爾可夫模型的參數學習,并以端到端的方式誘導低維空間的表示學習和用于無監督故障檢測的密度估計,避免預訓練需要。
- 還沒有人留言評論。精彩留言會獲得點贊!