光儲系統的三維建模方法、裝置、光儲系統和建模系統與流程
本技術屬于光儲系統領域,尤其涉及一種光儲系統的三維建模方法、裝置、光儲系統和建模系統。
背景技術:
1、在工商業場景中,一個場地通常包括多個光儲設備,每個光儲設備都包括多個子設備;在實際應用過程中,如果發現設備故障,需要從眾多設備中找到發生故障的光儲設備或子設備。相關技術中,通過手動構建光儲設備的三維模型,尋找故障設備。但是,上述構建三維模型的方法過程繁瑣、需要測量大量設備,人工成本高且容易發生錯誤,無法滿足大規模光儲設備管理的需求。
技術實現思路
1、本技術旨在至少解決相關技術中存在的技術問題之一。為此,本技術提出一種光儲系統的三維建模方法、裝置、光儲系統和建模系統,無需測試大量設備,即可精準構建光儲系統的三維模型,降低人工成本并減少人工標記過程中可能產生的錯誤,滿足大規模光儲設備管理的需求。
2、第一方面,本技術提供了一種光儲系統的三維建模方法,所述光儲系統包括至少一個光儲設備,各所述光儲設備包括至少一個子設備,該方法包括:
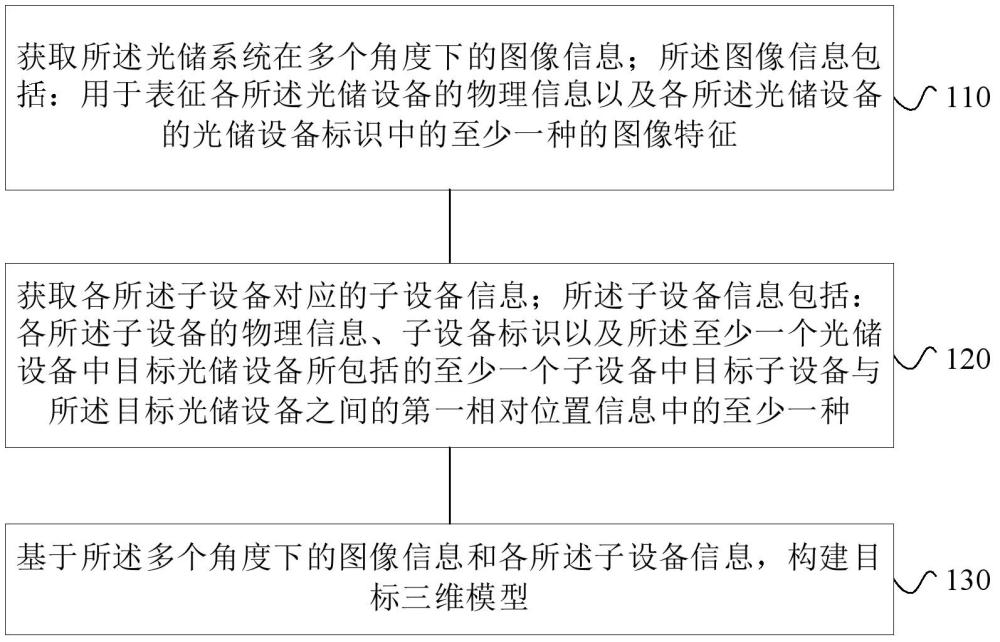
3、獲取所述光儲系統在多個角度下的圖像信息;所述圖像信息包括:用于表征各所述光儲設備的物理信息以及各所述光儲設備的光儲設備標識中的至少一種的圖像特征;
4、獲取各所述子設備對應的子設備信息;所述子設備信息包括:各所述子設備的物理信息、子設備標識以及所述至少一個光儲設備中目標光儲設備所包括的至少一個子設備中目標子設備與所述目標光儲設備之間的第一相對位置信息中的至少一種;
5、基于所述多個角度下的圖像信息和各所述子設備信息,構建目標三維模型。
6、根據本技術的光儲系統的三維建模方法,通過獲取的光儲系統在多個角度下的圖像信息和各子設備的子設備信息,共同構建光儲系統的三維模型,無需測試大量設備,即可精準構建光儲系統的三維模型,降低人工成本并減少人工標記過程中可能產生的錯誤,滿足大規模光儲設備管理的需求。
7、根據本技術的光儲系統的三維建模方法,所述基于所述多個角度下的圖像信息和各所述子設備信息,構建目標三維模型,包括:
8、基于所述多個角度下的圖像信息,構建整體三維模型;
9、基于所述子設備信息處理所述整體三維模型,得到所述目標三維模型。根據本技術的光儲系統的三維建模方法,
10、根據本技術的光儲系統的三維建模方法,所述基于所述多個角度下的圖像信息,構建整體三維模型,包括:
11、基于用于表征各所述光儲設備的所述光儲設備標識的圖像特征,確定各所述光儲設備之間的相對位置方向;
12、基于用于表征各所述光儲設備的物理信息的圖像特征,確定各所述光儲設備之間的相對位置距離;
13、基于所述相對位置方向以及所述相對位置距離,確定第二相對位置信息;所述第二相對位置信息用于表征各所述光儲設備之間的連接位置關系;
14、基于所述第二相對位置信息以及用于表征各所述光儲設備的物理信息的圖像特征,構建所述整體三維模型。
15、根據本技術的光儲系統的三維建模方法,所述基于所述第二相對位置信息以及用于表征各所述光儲設備的物理信息的圖像特征,構建所述整體三維模型,包括:
16、基于所述第二相對位置信息以及用于表征各所述光儲設備的物理信息的圖像特征,通過同時定位與地圖構建技術,構建所述整體三維模型。
17、根據本技術的光儲系統的三維建模方法,所述基于用于表征各所述光儲設備的所述光儲設備標識的圖像特征,確定各所述光儲設備之間的相對位置方向;基于用于表征各所述光儲設備的物理信息的圖像特征,確定各所述光儲設備之間的相對位置距離,包括:
18、獲取所述多個角度下的圖像信息對應的慣性測量單元傳感器數據;
19、基于用于表征各所述光儲設備的所述光儲設備標識的圖像特征以及所述慣性測量單元傳感器數據,確定所述相對位置方向;基于用于表征各所述光儲設備的物理信息的圖像特征以及所述慣性測量單元傳感器數據,確定所述相對位置距離。
20、根據本技術的光儲系統的三維建模方法,所述基于所述子設備信息處理所述整體三維模型,得到所述目標三維模型,包括:
21、基于所述目標光儲設備的用于表征所述光儲設備標識的圖像特征,確定所述目標光儲設備所包括的子設備;
22、基于所述目標光儲設備所包括的子設備對應的子設備信息,處理所述整體三維模型中與所述目標光儲設備對應的部分三維模型;
23、基于各所述目標光儲設備對應的部分三維模型,得到所述目標三維模型。
24、根據本技術的光儲系統的三維建模方法,所述物理信息包括:目標設備的重量、所述目標設備的形狀以及所述目標設備的尺寸中的至少一種;所述目標設備包括:所述目標光儲設備和所述目標光儲設備所包括的至少一個子設備。
25、根據本技術的光儲系統的三維建模方法,在所述基于所述多個角度下的圖像信息和各所述子設備信息,構建目標三維模型之后,所述方法還包括:
26、輸出所述目標三維模型。
27、根據本技術的光儲系統的三維建模方法,所述獲取所述光儲系統在多個角度下的圖像信息,包括:
28、獲取移動終端采集的所述光儲系統在多個角度下的圖像信息。
29、第二方面,本技術提供了一種光儲系統的三維建模裝置,所述光儲系統包括至少一個光儲設備,各所述光儲設備包括至少一個子設備,該裝置包括:
30、第一處理模塊,用于獲取所述光儲系統在多個角度下的圖像信息;所述圖像信息包括:用于表征各所述光儲設備的物理信息以及各所述光儲設備的光儲設備標識中的至少一種的圖像特征;
31、第二處理模塊,用于獲取各所述子設備對應的子設備信息;所述子設備信息包括:各所述子設備的物理信息、子設備標識以及所述至少一個光儲設備中目標光儲設備所包括的至少一個子設備中目標子設備與所述目標光儲設備之間的第一相對位置信息中的至少一種;
32、第三處理模塊,用于基于所述多個角度下的圖像信息和各所述子設備信息,構建目標三維模型。
33、根據本技術的光儲系統的三維建模裝置,通過獲取的光儲系統在多個角度下的圖像信息和各子設備的子設備信息,共同構建光儲系統的三維模型,無需測試大量設備,即可精準構建光儲系統的三維模型,降低人工成本并減少人工標記過程中可能產生的錯誤,滿足大規模光儲設備管理的需求。
34、第三方面,本技術提供了一種光儲系統,包括:
35、至少一個光儲設備;
36、至少一個子設備,所述至少一個子設備設置于各所述光儲設備;
37、所述光儲系統基于如第一方面所述的光儲系統的三維建模方法建模。
38、第四方面,本技術提供了一種基于如第一方面所述的光儲系統的三維建模方法的建模系統,包括:
39、第四處理模塊,所述第四處理模塊部署于移動終端,所述第四處理模塊用于采集所述光儲系統在多個角度下的圖像信息;
40、第五處理模塊,所述第五處理模塊部署于云平臺,所述第五處理模塊與所述第四處理模塊電連接,所述第五處理模塊用于獲取各所述子設備的子設備信息;
41、所述第四處理模塊和所述第五處理模塊中的至少一種,用于基于所述光儲系統在多個角度下的圖像信息和各所述子設備信息,構建所述目標三維模型。
42、第五方面,本技術提供了一種非暫態計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現如上述第一方面所述的光儲系統的三維建模方法。
43、第六方面,本技術提供了一種計算機程序產品,包括計算機程序,所述計算機程序被處理器執行時實現如上述第一方面所述的光儲系統的三維建模方法。
44、本技術實施例中的上述一個或多個技術方案,至少具有如下技術效果之一:
45、通過獲取的光儲系統在多個角度下的圖像信息和各子設備的子設備信息,共同構建光儲系統的三維模型,無需測試大量設備,即可精準構建光儲系統的三維模型,降低人工成本并減少人工標記過程中可能產生的錯誤,滿足大規模光儲設備管理的需求。
46、進一步地,通過光儲設備的物理信息和光儲設備標識,有效確定各光儲設備的相對位置信息,基于各光儲設備的相對位置信息和表征光儲設備物理信息中的形狀以及結構的圖像信息,確定各設備之間的關聯關系,從而構建整體三維模型,構建方式簡單快速,且建模的準確度高。
47、更進一步地,通過確定目標光儲設備所包括的子設備,基于各子設備的子設備信息,處理目標光儲設備對應的部分三維模型,從而得到與實際的目標光儲設備的設置方式對應的三維模型,對各光儲設備進行填充補全,可得到光儲系統的目標三維模型,構建方式簡單快速,提高三維模型的構建效率,減少人工干預和錯誤,降低人工成本。
48、再進一步地,通過獲取慣性測量單元傳感器數據,以確定采集多個角度下的圖像信息的過程中,所用設備的運動情況,基于設備的運動情況和多個角度下的圖像信息,共同確定相對位置方向和相對位置距離,提高確定的任意兩個光儲設備之間的相對位置方向以及相對位置信息的精度以及準確度,從而提高基于相對位置方向以及相對位置信息確定的第二相對位置信息的準確性。
49、本技術的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本技術的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!