一種融合演進的卡車機動性復雜網絡的構建方法
本發明屬于交通時空網絡領域;具體地,涉及一種融合演進的卡車機動性復雜網絡的構建方法。
背景技術:
1、卡車作為城市貨運的最基本的移動單元,承擔著工業企業、物流倉庫、綜合市場等功能場所之間的大批量運輸任務,其軌跡數據體現了卡車出行服務活動在不同區域之間、不同企業之間的空間聯系,在此基礎上,迫切需要從卡車群體機動性角度,研究卡車出行服務在復雜網絡理論視角下的機動性演變機理,以發揮卡車主體在城市經濟活動中的重要支撐作用。
2、卡車機動性網絡界定、構建和研判,是揭示城市貨運系統核心結構、動態演進規律的關鍵技術內容,其中卡車機動性網絡構建方法是首要的研究基礎。本研究界定的卡車機動性網絡是指由卡車poi構成的卡車移動網絡,隨著卡車poi之間吸引關系的動態變化,而演進生成的、由新的卡車poi加入或者移除的卡車移動網絡。即卡車機動性網絡的本質是一個動態網絡,其節點為卡車poi;既表征了poi之間的吸引關系,又體現了卡車的實際移動狀況。
3、目前,卡車機動性分析多采用卡車時空軌跡預測分析,如已公開中國專利cn202010631885.0“一種生成對抗網絡模型、及利用該生成對抗網絡模型的車輛軌跡預測方法”,cn202211472334.x“一種基于生成對抗網絡的兩階段軌跡生成方法”等,只關注卡車的軌跡數據,未考慮城市建成環境因素(如道路路況和物流設施空間分布)對交通出行、道路活力、卡車的配貨需求以及對物流車輛運動軌跡的影響,缺乏路段相關性數據的綜合考慮和判斷等,導致該方法得到的卡車的機動性分析結果過分依賴于軌跡數據,具有片面性。還有已報道的中國專利cn202011414792.9提出了“一種入廠物流集群的空間集聚特征提取方法”,限于卡車在城市路網上的空間集聚特征的挖掘,不能揭示卡車集群構成的復雜網絡各項特征。
4、經上述研究比較分析,本專利采用復雜網絡原理,提出一種融合演進的卡車機動性復雜網絡構建方法,該方法兼顧了城市道路物理網絡和貨車運輸線路網絡,基于軌跡數據提取了卡車poi集合,融合吸引力模型和斷裂點模型,形成融合演進的網絡增長模型,實現城市卡車機動性網絡的動態生成、新的poi點的加入和移除等。經查閱同類研究文獻和專利,少見報道。
5、現有文獻如doi:10.1016/j.tranpol.2012.06.011“compliance?with?andinfluence?of?a?new?in-car?navigation?system?for?trucks:?results?of?a?fieldtest.”、doi:10.1016/j.sbspro.2012.09.776“spatial?environmental?analysis?on?theeffects?of?a?new?navigation?system?for?freight?transport.”在識別卡車poi中,多采用軌跡特征,例如速度、加速度和卡車方向來推斷重型卡車在給定時間段內的運動狀態(靜止或移動),然后根據gps軌跡確定卡車停靠點。然而,只考慮卡車的軌跡特征,容易將卡車的臨時停靠點誤判為卡車的poi;部分研究doi:10.3141/2494-10:“estimation?ofstatewide?origin-destination?truck?flows?from?large?streams?of?gps?dataapplication?for?florida?statewide?model.”根據卡車停車的經驗數據區分停靠點是否為卡車的實際poi,然而該方法過于依賴歷史經驗數據,主觀性較大。
6、現有文獻在構建卡車poi吸引力模型時,如:doi:10.2307/3144521“aprobabilistic?analysis?of?shopping?center?trade?areas.”、doi:10.2307/2084520“intervening?opportunities:?a?theory?relating?mobility?and?distance.”、doi:10.1111/j.1435-5597.1959.tb01665.x“?gravity?models?and?trip?distributiontheory.”所提到的吸引力模型,只將poi之間的距離和poi的流量作為考慮因素,均未能考慮卡車poi屬性為卡車poi吸引力所帶來的影響。
7、現有文獻如doi:10.1016/j.trc.2023.104442?“structure?and?dynamics?ofurban?freight?truck?movements:?a?complex?network?theory?perspective”在構建卡車機動性網絡的動態演進機理時,將卡車的poi按照吸引力關系逐個添加至卡車機動性網絡中,但未能考慮隨著節點被不斷引入,poi之間的斷裂條件超過斷裂閾值,poi之間的連接變會發生斷裂的情況。
技術實現思路
1、鑒于上述問題,本發明的目的是提供一種融合演進的卡車機動性復雜網絡的構建方法,通過基于洛倫茲曲線法精確識別卡車poi集合,考慮卡車poi屬性差異,基于最大熵原理重構卡車poi吸引力模型,以及考慮卡車poi之間吸引力的動態變化,引入斷裂點模型,仿真實現了卡車出行服務機動性的動態演進機理,以克服上述現有技術的不足。
2、為實現上述目的,本發明采用如下技術方案:
3、一種融合演進的卡車機動性復雜網絡的構建方法,其特征在于,包括以下步驟:
4、步驟a:獲取道路上的卡車軌跡數據與抓取各個城市貨運相關的poi,其中,卡車軌跡數據包括車輛的id、經度、緯度、gps時間、速度,城市貨運相關的poi數據包括poi的id、名稱、經度、緯度、屬性;
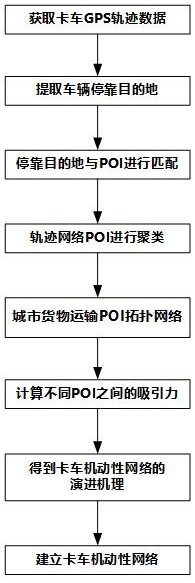
5、步驟b:從卡車軌跡中提取車輛停靠目的地;
6、步驟c:將每個車輛的停靠目的地與poi進行匹配,得到單個卡車的機動性網絡;
7、步驟d:將單個卡車的軌跡網絡進行聚合,并采用自適應dbscan方法對軌跡網絡poi進行聚類,得到城市貨物運輸poi拓撲網絡;
8、步驟e:根據空間交互理論,利用城市貨物運輸poi拓撲網絡的屬性計算各poi之間的吸引力和斷裂條件;
9、步驟f:利用吸引力和斷裂條件,得到卡車機動性網絡的演進機理,并根據這一機理構建卡車機動性網絡。
10、作為本發明的優選,在步驟b中還包括以下步驟:
11、步驟b1:從卡車軌跡中提取車輛速度為0時的位置,即卡車停靠位置;
12、步驟b2:確定停車時間閾值;
13、步驟b2.1:將卡車停靠位置按停車時間降序排列,并計算重型卡車在排序停靠站的累計停車時間,對排序的卡車停靠站的序數和相應的累積停車時間進行歸一化,繪制洛倫茲曲線l1:
14、步驟b2.2:計算洛倫茲曲線在(1,?1)處的切線與橫軸的交點f*,標準化序數大于f*的卡車長期停留站點被劃分為第一類停留點,移除第一類的停留點,重復步驟b2.1,得到洛倫茲曲線l2,l2在(1,?1)處的切線與橫軸的交點f*’,標準化序數大于f*’的卡車長期停留站點被劃分為第二類停留點,將第二類停留點再移除,重復步驟b2.1,得到洛倫茲曲線l3,l3在(1,?1)處的切線與橫軸的交點f*’’,標準化序數大于?f*’’的卡車長期停留站點被劃分為第三類停留點,第三類停留點所對應的停車時間即為停車時間閾值;
15、步驟b3:將全部停車點停靠時間與停車時間閾值進行比較,將停車時間小于時間閾值的停車點視作臨時停車點并刪除,從而得到車輛停靠目的地。
16、作為本發明的優選,在步驟c中還包括以下步驟:
17、步驟c1:將通過步驟b得到的卡車停靠目的地與貨運相關poi進行匹配;
18、步驟c1.1:wgs84坐標系下兩點間距離公式;
19、坐標系中,令a、b兩點間的實際距離為,則
20、;
21、式中,為地球半徑6371km;單位為km;為a緯度;為b緯度;為a經度;為b經度;
22、步驟c1.2:通過步驟c1.1中所述公式,計算卡車停靠點與各poi之間的距離,記作;
23、停靠點與任意poi之間haversine距離為:;
24、式中各參數含義同步驟c1.1中各個參數,為地球半徑6371km;單位為km;為節點 i緯度;為節點 j緯度;為節點 i經度;為 j經度;
25、步驟c1.3:利用構建車輛停靠點與poi之間的距離矩陣;
26、;
27、式中各個參數含義如下:代表車輛停靠點與poi之間的距離矩陣,其中代表車輛停靠在位置1時與之間的距離;代表車輛停靠在位置1時與之間的距離;代表車輛停靠在位置m與之間的距離;代表車輛停靠在位置m時與之間的距離;步驟c1.4:取矩陣中最小值所對應的下標,則即為卡車在停靠點的實際目的地,卡車的行駛軌跡可記為,則
28、;
29、式中,l代表車輛的實際軌跡,即車輛的實際軌跡為:,其中,代表車輛現實中停靠點為1時,其實際目的停靠點是第個poi點,代表車輛現實中停靠點為2時,其實際目的停靠點是第個poi點,以此類推,代表車輛現實中停靠點為m時,其實際目的停靠點是第個poi點。
30、作為本發明的優選,在步驟d中還包括以下步驟:
31、步驟d1:將全部卡車的軌跡網絡進行聚合;
32、步驟d2:將距離相近的poi,根據地理位置關系采用dbscan方法進行聚類;
33、步驟d2.1:計算步驟d1得到的網絡圖中,任意兩poi間距離,得出距離分布矩陣;
34、;
35、式中,為各個poi之間的距離分布矩陣,是與之間的距離,是與之間的距離,是與之間的距離,以此類推,是與的距離;
36、步驟d2.2:將的每行元素升序排序,得到矩陣,則第1列的元素所組成的距離向量表示對象到自身的距離,全為0,第列的元素構成所有數據點的-最近鄰距離向量;
37、步驟d2.3:對向量中的元素求平均,可得到向量的-平均最近鄰距離,并將其作為候選鄰域半徑參數,對所有的值進行計算,則得到參數列表,表示為:
38、;
39、步驟d2.4:對參數列表和poi的實際緩沖區半徑取交集,得到最終確定的鄰域半徑參數,記作,則
40、;
41、式中,為poi的實際緩沖區半徑;
42、步驟d2.5:生成鄰域密度參數;
43、采用數學期望法生成參數,則
44、;
45、式中,為第 i個對象的鄰域對象數量, n為與卡車軌跡相匹配的全部poi數目;
46、步驟d2.6:將步驟d2.4得到的參數、步驟d2.5得到的參數作為dbscan參數,將經典dbscan算法中的“閔可夫斯基距離”替換為步驟c1.1中的haversine距離,進行聚類并拓撲,得到城市貨物運輸poi拓撲網絡。
47、作為本發明的優選,在步驟e中還包括以下步驟:
48、步驟e1:采用最大熵模型法得到各poi之間的吸引力;
49、步驟e1.1:特征提取,
50、提取poi的各類屬性,具體為屬性、所處地理位置、poi之間的距離,作為特征屬性,記為
51、;
52、式中,為各類特征屬性函數的集合;為特征屬性所對應的函數,用以描述特征屬性對poi之間互相連接的吸引力;則表示在特征屬性的作用下,對的吸引力影響;為特征屬性的作用下,對的吸引力影響;為特征屬性的作用下,對的吸引力影響;為特征屬性的作用下,對的吸引力影響;步驟e1.2:構建約束集合;
53、步驟e1.2.1:利用步驟d中得到的拓撲網絡,得到根據現有數據統計與的聯合概率分布,記為,以及的概率分布,則
54、;
55、;
56、式中,表示與相互吸引的個數,表示節點的總吸引數,表示節點的總數;為根據現有數據統計與的聯合概率分布;為根據現有數據統計的概率分布;表示節點個數,帶入到本問題中,每個節點只有一個,因此取值為1;
57、步驟e1.2.2:確定約束條件;
58、;
59、;
60、式中,為特征屬性對poi的吸引力的期望影響,這一影響應盡可能近似于,現實中各類特征屬性對poi之間吸引力的影響;代表節點x對節點y的吸引概率,節點x對所有節點的吸引概率之和應為1;
61、步驟e1.2.3:將約束條件與poi之間的吸引力建立聯系,則
62、;
63、;
64、;
65、;
66、式中,為理論與的聯合概率分布,為根據現有數據統計得到的與的聯合概率分布,為吸引的概率分布,為理論中的概率分布,近似等于,為根據現有數據統計與的聯合概率分布;為根據現有數據統計的概率分布;
67、步驟e1.3:構建目標熵函數,
68、最大化熵意味著分配了最多的不確定性,不對未知信息做出任何不必要的假設,通常被視為一種最公正、最不偏見的選擇,令目標熵函數為,則
69、;
70、式中,為poi互相吸引所產生的總體熵;為對的吸引力;為以e為底的對數;為理論上在全部poi集合中的概率分布;
71、步驟e1.4:模型整理,
72、步驟e1.4.1:目標函數,
73、;
74、步驟e1.4.2:約束條件,
75、;
76、;
77、;
78、;
79、;
80、;
81、;
82、;
83、;
84、步驟e1.4.3:現有訓練數據集,
85、;
86、式中,代表區域內所有poi節點所構成的集合,代表第一個poi,代表第二個poi,以此類推,代表第n個poi;
87、求解步驟e1.4.1目標函數、步驟e1.4.2約束條件、步驟e1.4.3數據集聯合構成的模型,即可得到各poi之間的吸引力;
88、步驟e2:各poi之間的斷裂條件;
89、步驟e2.1:確定各個poi屬性;
90、步驟e2.2:計算各poi到物流公司之間的斷裂條件;
91、;
92、式中,為兩個競爭物流園區之間的距離,與分別為影響因素對兩個競爭物流園區服務范圍的影響權重;與分別為影響因素對兩個競爭物流園區影響量化;為影響因素的個數,其中,影響因素包括poi與物流公司的haversine距離、各poi的實際貨物需求量、物流公司的園區規模;
93、步驟e2.3:得到各個物流公司的斷裂矩陣;
94、整理步驟e2.2中得到的任意兩點斷裂條件,可得到整個網絡中的斷裂矩陣,
95、;
96、該矩陣為對稱矩陣,主對角線的元素均為0;
97、式中,為網絡的斷裂矩陣,為與的斷裂值,為與的斷裂值,為與的斷裂值,為與的斷裂值;
98、步驟e2.4:確定斷裂閾值,將矩陣中各個元素與進行比較,如小于,則將節點 i與節點 j進行斷裂處理。
99、作為本發明的優選,在步驟f中還包括以下步驟:
100、步驟f1:確定初始化網絡節點;
101、步驟f2:隨機連接初始化網絡的邊;通過初始化網絡的邊,模擬各貨運相關poi的現有連接模式;
102、步驟f3:隨機將一個貨運poi引入網絡中;
103、步驟f3.1:將一個poi引入網絡,視作一個新的節點;
104、步驟f3.2:根據這一個新的節點的屬性,計算該節點與網絡內全部節點的吸引力和斷裂條件;
105、步驟f3.3:根據步驟f3.2得到的吸引力確定這一個新的節點應與網絡內幾個節點相連;
106、步驟f3.4:根據步驟f3.2得到的斷裂條件確定現有節點應與幾個節點的連接邊發生斷裂:
107、步驟f3.4:根據步驟f3.2得到的吸引力,利用賭輪法確定連線和斷裂情況;
108、步驟f4:重復步驟f3的過程,直至卡車機動性網絡構建完畢。
109、本發明的優點及積極效果是:
110、1、本發明針對構建卡車機動性復雜網絡前,應準確識別卡車poi問題。如誤將卡車的臨時停靠點視為卡車poi,會導致大量與卡車的實際運行無關的節點出現在卡車機動性復雜網絡,進而導致建立的卡車機動性復雜網絡會得到錯誤的卡車軌跡運行規律,以及城市貨運系統的內在運動規律。通過基于洛倫茲曲線法精確識別卡車poi集合,在軌跡拓撲為網絡結構的過程中,采用洛倫茲曲線法確定停車時間閾值,通過停車時間與停車時間閾值的比較,篩查并剔除卡車停車點中的臨時停靠點,以確保卡車篩選出的卡車停止位置中,無臨時停靠點。從而杜絕了不是貨運相關的poi被誤判為貨運相關的poi的現象的出現。
111、2、本發明針對卡車poi之間的相互吸引關系,決定著哪些poi之間會產生合作,進而導致哪些poi之間會有卡車的行駛軌跡。而poi的屬性類別、距離、流量,都會對poi之間的吸引力產生影響。通過考慮卡車poi屬性差異,基于最大熵原理重構卡車poi吸引力模型。在構建網絡節點時,按照現實比例隨機生成貨運相關poi的屬性,建立卡車poi吸引力的最大熵模型,通過求解該模型得到各種屬性poi之間的吸引力,從而準確描述了各種屬性卡車poi之間的吸引關系。
112、3、本發明針對隨著網絡的演進,卡車poi之間的吸引關系也會發生變化,當poi之間的吸引力過低時,poi之間的“合作”可能會“暫時中斷”問題。通過考慮卡車poi之間吸引力的動態變化,引入斷裂點模型,仿真實現了卡車出行服務機動性的動態演進機理。引入斷裂點原理,分析了卡車機動性網絡演化過程中poi之間的相互吸引發生變化時,如果兩個poi之間的吸引力降低且低于斷裂閾值,這兩個poi暫時中斷合作關系,直到其吸引力重新滿足連接要求時重新合作。這一過程反映的是現實中各節點與貨運公司展開合作,終止合作以及重新合作的過程。
- 還沒有人留言評論。精彩留言會獲得點贊!