一種自動影像報靶系統智能標定方法及其系統與流程
本發明涉及智能標定,尤其涉及一種自動影像報靶系統智能標定方法及其系統。
背景技術:
1、智能標定技術領域涉及使用計算方法自動校準和調整設備或系統的參數,以達到預定的性能標準。用于圖像處理系統、傳感器網絡和各種控制系統中,以確保輸出數據的準確性和可靠性。智能標定技術可以基于機器學習方法自動適應環境變化,提高系統的適應性和效率。關鍵在于減少人工干預,提高自動化水平,用于醫療成像、機器人視覺和航空攝影等領域。
2、其中,自動影像報靶系統智能標定方法是指利用智能算法自動調整影像捕捉系統中的參數,以確保目標影像的精確捕獲和處理。用途包括軍事、安全監控和運動分析中的目標追蹤和識別。通過自動標定,系統能夠快速適應環境變化,提高目標檢測的準確率和效率,優化整體的影像分析流程。
3、現有智能標定技術依賴于人工校準和參數調整,不能及時準確地反映環境變化對設備性能的影響,導致影像捕獲的精確度和效率下降。例如,在軍事或安全監控應用中,環境因素如突變的光照或氣象條件迅速影響影像質量,而傳統技術在自動適應變化方面表現不佳。滯后的調整不僅增加操作復雜性,也導致關鍵情況下的信息損失或錯誤決策。
技術實現思路
1、本發明的目的是解決現有技術中存在的缺點,而提出的一種自動影像報靶系統智能標定方法及其系統。
2、為了實現上述目的,本發明采用了如下技術方案,一種自動影像報靶系統智能標定方法,包括以下步驟:
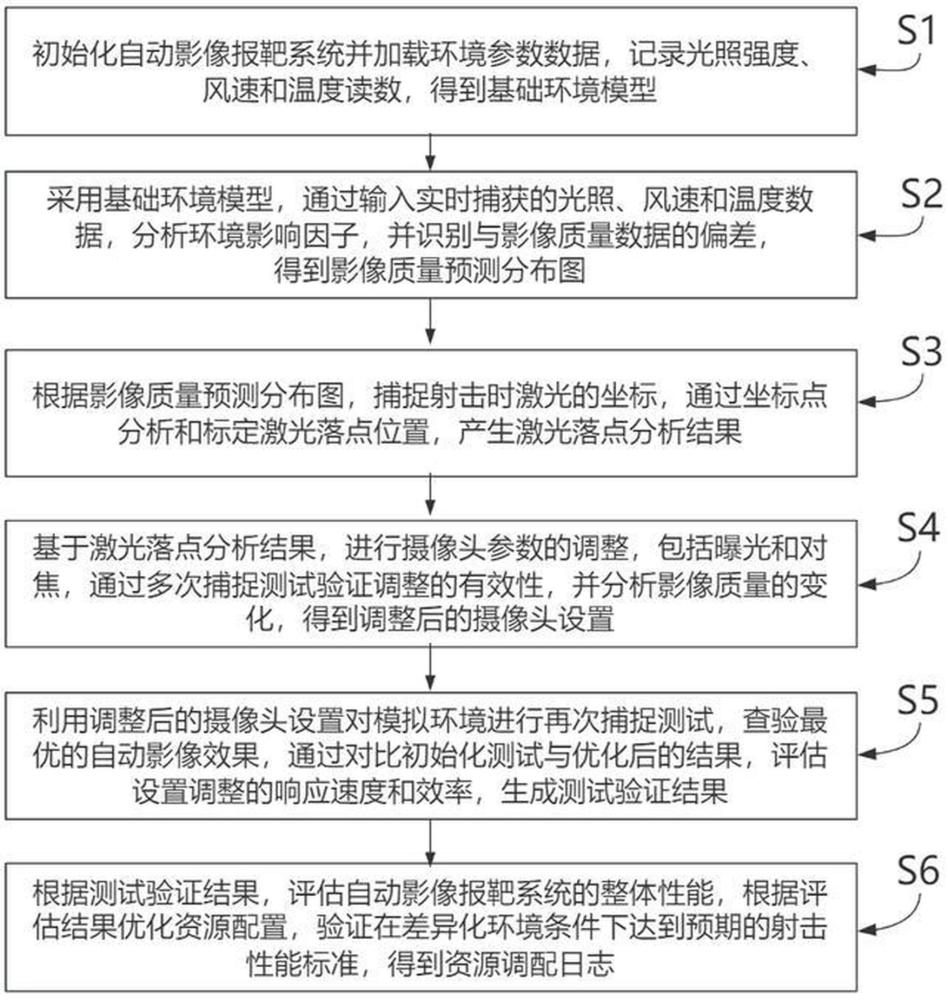
3、s1:初始化自動影像報靶系統并加載環境參數數據,記錄光照強度、風速和溫度讀數,得到基礎環境模型;
4、s2:采用所述基礎環境模型,通過輸入實時捕獲的光照、風速和溫度數據,分析環境影響因子,并識別與影像質量數據的偏差,得到影像質量預測分布圖;
5、s3:根據所述影像質量預測分布圖,捕捉射擊時激光的坐標,通過坐標點分析和標定激光落點位置,產生激光落點分析結果;
6、s4:基于所述激光落點分析結果,進行攝像頭參數的調整,包括曝光和對焦,通過多次捕捉測試驗證調整的有效性,并分析影像質量的變化,得到調整后的攝像頭設置;
7、s5:利用所述調整后的攝像頭設置對模擬環境進行再次捕捉測試,查驗最優的自動影像效果,通過對比初始化測試與優化后的結果,評估設置調整的響應速度和效率,生成測試驗證結果;
8、s6:根據所述測試驗證結果,評估自動影像報靶系統的整體性能,根據評估結果優化資源配置,驗證在差異化環境條件下達到預期的射擊性能標準,得到資源調配日志。
9、作為本發明的進一步方案,所述基礎環境模型包括光照強度模型、風速影響模型和溫度穩定性模型,所述影像質量預測分布圖包括實時光照偏差、風速變化率和溫度波動對影像質量的影響,所述激光落點分析結果包括激光實時坐標與預期坐標的偏差、偏差原因分析和激光穩定性評估結果,所述調整后的攝像頭設置包括優化后的曝光時間、對焦程度調整和攝像頭穩定性配置,所述測試驗證結果包括曝光和對焦調整的響應速度、影像質量效率和環境適應性變化,所述資源調配日志包括資源重新配置的優先級、調整后資源的使用效率和在差異化環境條件下的性能驗證。
10、作為本發明的進一步方案,初始化自動影像報靶系統并加載環境參數數據,記錄光照強度、風速和溫度讀數,得到基礎環境模型的步驟具體為:
11、s101:初始化自動影像報靶系統并加載環境參數數據,通過配置傳感器接口和數據通訊協議,同步時鐘,進行基礎數據收集,生成啟動記錄;
12、s102:根據所述啟動記錄,設置環境監測傳感器,分別調校光照、風速和溫度傳感器的靈敏度,校準測量閾值,并啟動連續數據采樣流程,生成環境監測數據;
13、s103:通過所述環境監測數據,對收集到的光照、風速、溫度數據進行篩選和處理,合并數據記錄,匹配實時的環境變化,生成基礎環境模型。
14、作為本發明的進一步方案,采用所述基礎環境模型,通過輸入實時捕獲的光照、風速和溫度數據,分析環境影響因子,并識別與影像質量數據的偏差,得到影像質量預測分布圖的步驟具體為:
15、s201:采用所述基礎環境模型,輸入實時捕獲的光照、風速、溫度數據,同步數據到模型中,進行初始化的環境影響因子分析,生成實時環境數據記錄;
16、s202:通過所述實時環境數據記錄,運用基礎環境模型分析光照、風速和溫度對影像質量的潛在影響,識別數據間的偏差,并進行影像質量的調整和預測,生成影像質量影響分析結果;
17、s203:基于所述影像質量影響分析結果,匯總環境數據和影像質量偏差,通過識別關鍵數據點,分析自動影像需要智能調整的區域,生成影像質量預測分布圖。
18、作為本發明的進一步方案,根據所述影像質量預測分布圖,捕捉射擊時激光的坐標,通過坐標點分析和標定激光落點位置,產生激光落點分析結果的步驟具體為:
19、s301:采用所述影像質量預測分布圖,采用卡爾曼濾波算法,進行激光坐標的實時追蹤和優化,通過同步接收射擊時刻的激光坐標點,生成激光坐標捕捉記錄;
20、s302:基于所述激光坐標捕捉記錄,進行激光落點的坐標分析,標定激光落點,校正激光路徑誤差,評估環境因素對激光落點的影響,生成誤差分析數據;
21、s303:根據所述誤差分析數據,整合激光落點的位置數據,記錄每個落點的位置誤差和偏移分析,對激光落點進行評估,生成激光落點分析結果。
22、作為本發明的進一步方案,所述卡爾曼濾波算法的公式如下:
23、;
24、其中,為調整后的狀態估計,為時間點k之前的狀態估計,為卡爾曼增益,為時間點k的實時測量值,為轉換矩陣,為增益調整系數,為偏置調整,為測量敏感度調整系數,為誤差修正值。
25、作為本發明的進一步方案,基于所述激光落點分析結果,進行攝像頭參數的調整,包括曝光和對焦,通過多次捕捉測試驗證調整的有效性,并分析影像質量的變化,得到調整后的攝像頭設置的步驟具體為:
26、s401:根據所述激光落點分析結果,調整攝像頭的曝光和對焦參數,同步更新自動影像報靶系統中的攝像頭控制,執行實時參數修改,生成攝像頭參數調整記錄;
27、s402:基于所述攝像頭參數調整記錄,通過多次捕捉測試,記錄每次測試的影像數據,并對比調整前后的影像質量差異,執行連續性驗證,生成調整驗證分析結果;
28、s403:利用所述調整驗證分析結果,分析多次測試數據中影像質量的變化,評估曝光和對焦參數調整的整體效果,生成調整后的攝像頭設置。
29、作為本發明的進一步方案,利用所述調整后的攝像頭設置對模擬環境進行再次捕捉測試,查驗最優的自動影像效果,通過對比初始化測試與優化后的結果,評估設置調整的響應速度和效率,生成測試驗證結果的步驟具體為:
30、s501:利用所述調整后的攝像頭設置,設置模擬環境參數,進行再次捕捉測試,同步更新數據捕捉協議,測試最優影像效果,生成再次捕捉測試記錄;
31、s502:基于所述再次捕捉測試記錄,比較初始化測試與優化后的影像結果,記錄每次測試的響應速度和處理效率,執行自動影像報靶系統的性能分析,生成優化效果比較結果;
32、s503:采用所述優化效果比較結果,評估調整設置的響應速度和效率優化情況,結合測試結果與性能變化數據,評估和量化性能變化的影響,生成測試驗證結果。
33、作為本發明的進一步方案,根據所述測試驗證結果,評估自動影像報靶系統的整體性能,根據評估結果優化資源配置,驗證在差異化環境條件下達到預期的射擊性能標準,得到資源調配日志的步驟具體為:
34、s601:通過所述測試驗證結果,分析自動影像報靶系統的運作效率,檢查資源使用情況,調整資源分配策略匹配性能需求,生成性能評估結果;
35、s602:采用所述性能評估結果,優化資源配置,根據自動影像報靶系統的性能和環境條件的需求,重新配置硬件和軟件資源,調整參數設置,進行環境適應性測試,生成資源優化記錄;
36、s603:利用所述資源優化記錄,驗證自動影像報靶系統在差異化環境條件下的射擊性能是否達到預期標準,通過實時射擊測試驗證性能的穩定性,生成資源調配日志。
37、一種自動影像報靶系統智能標定系統,所述自動影像報靶系統智能標定系統用于執行上述自動影像報靶系統智能標定方法,所述系統包括:
38、環境初始化模塊加載自動影像報靶系統的光照強度、風速和溫度參數,對環境參數進行記錄,生成基礎環境模型;
39、質量分析模塊根據所述基礎環境模型,輸入實時光照強度、風速、溫度參數,分析環境因子對影像的影響,并識別影像質量數據偏差,生成影像質量預測分布圖;
40、激光坐標捕捉模塊利用所述影像質量預測分布圖,捕捉射擊時激光的坐標,對坐標點進行分析,標定激光落點,生成激光落點分析結果;
41、攝像頭驗證模塊基于所述激光落點分析結果,調整攝像頭參數,通過多次捕捉測試,驗證調整的有效性,分析影像質量變化,生成調整后的攝像頭設置;
42、性能優化模塊使用所述調整后的攝像頭設置,對模擬環境進行再次捕捉測試,通過對比初始化測試與優化后的結果,評估自動影像報靶系統的整體性能,優化資源配置,得到資源調配日志。
43、與現有技術相比,本發明的優點和積極效果在于:
44、本發明中,通過在自動影像報靶系統中加載并分析環境參數如光照強度、風速和溫度,及對影像質量的實時影響,實現環境因子與影像質量之間的動態調整。有效識別并自動調整攝像頭設置,如曝光和對焦,以應對環境變化,提升了影像的準確性和穩定性。通過對模擬環境的測試,自動影像報靶系統能夠迅速適應新環境,優化射擊性能,并確保自動影像報靶系統對環境變化的高響應速度和效率。實時的環境適應及參數調整機制,大幅度提升自動影像報靶系統的自適應能力,減少人工干預的需要,提高自動化程度和操作效率。
- 還沒有人留言評論。精彩留言會獲得點贊!