一種基于紅外圖像的缺陷檢測方法、裝置及設備
本技術涉及缺陷檢測,具體而言,涉及一種基于紅外圖像的缺陷檢測方法、裝置及設備。
背景技術:
1、蜂窩夾芯復合材料的制備工藝相對復雜,服役環境較惡劣,易產生脫粘、蜂窩芯材褶皺等缺陷,可能導致復合結構失效。為了最大限度地降低結構失效的風險,須采用先進的無損檢測技術及時發現潛在缺陷。紅外熱成像技術因其高效、快速、非接觸、易檢測等特點,被廣泛應用于復合材料的無損檢測。
2、然而,由于蜂窩夾芯復合材料的熱導率不均勻以及其結構特性(如多層夾層),導致紅外熱成像的采集質量受到影響,例如分辨率低、均勻性差、對比度弱。故在基于圖像處理的紅外缺陷識別領域,由于分割結果高度依賴于圖像的對比度,傳統的閾值分割方法往往無法準確分割缺陷。在對比度較低的圖像中,即目標與背景之間的灰度差異不明顯時,閾值的選取變得困難,容易導致分割錯誤。此外,蜂窩夾芯復合材料的紅外圖像像素分布不均勻,且缺陷邊緣與背景混雜,使得運用常規聚類方法進行缺陷提取時,容易出現邊緣漏檢或引入非目標信息的問題。
技術實現思路
1、本技術實施例的目的在于提供一種基于紅外圖像的缺陷檢測方法、裝置、及設備,用以解決了現有技術存在的上述問題,可實現不同物體表面缺陷/近表面缺陷的無損檢測,并提高檢測的效率以及準確率。
2、第一方面,提供了一種基于紅外圖像的缺陷檢測方法,該方法可以包括:
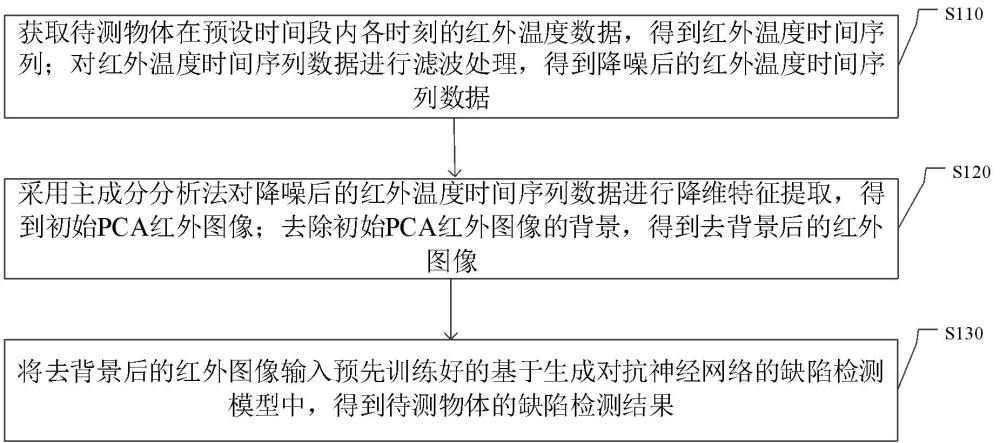
3、獲取待測物體在預設時間段內各時刻的紅外溫度數據,得到紅外溫度時間序列;
4、對所述紅外溫度時間序列數據進行濾波處理,得到降噪后的紅外溫度時間序列數據;
5、采用主成分分析法對所述降噪后的紅外溫度時間序列數據進行降維特征提取,得到初始pca紅外圖像;
6、去除所述初始pca紅外圖像的背景,得到去背景后的紅外圖像;
7、將所述去背景后的紅外圖像輸入預先訓練好的基于生成對抗神經網絡的缺陷檢測模型中,得到所述待測物體的缺陷檢測結果;其中,所述基于生成對抗神經網絡的缺陷檢測模型是基于預先構建的缺陷數據集對基于生成對抗神經網絡的缺陷檢測模型進行訓練得到的。
8、在一個可選的實現中,所述紅外溫度時間序列是由溫度矩陣與對應的時間組成的;
9、獲取待測物體在預設時間段內各時刻的紅外溫度數據,包括:
10、利用紅外檢測裝置采集待測物體在預設時間段內各時刻的紅外圖像;
11、針對任一時刻的紅外圖像,基于所述紅外圖像各個像素點的溫度值,構建所述時刻的溫度矩陣;
12、基于構建的各時刻的溫度矩陣,得到待測物體在預設時間段內各時刻的紅外溫度數據;
13、對所述紅外溫度時間序列數據進行濾波處理,得到降噪后的紅外溫度時間序列數據,包括:
14、對所述紅外溫度時間序列數據進行雙邊濾波處理,得到降噪后的紅外溫度時間序列數據。
15、在一個可選的實現中,所述溫度矩陣包含至少一行元素;
16、采用主成分分析法對所述降噪后的紅外溫度時間序列數據進行降維特征提取,得到初始pca紅外圖像,包括:
17、針對任一溫度矩陣,若所述溫度矩陣中包含多行元素,則將非第一行元素的其他行元素,按照行號從小到大,依次合并至第一行元素后,得到新的溫度矩陣;
18、將得到的各新的溫度矩陣,按照各新的溫度矩陣對應的時間的先后順序進行排序,得到排序后的多個新的溫度矩陣;
19、基于排序后的多個新的溫度矩陣,構建二維溫度矩陣;
20、對所述二維溫度矩陣去中心化,得到去中心后的二維溫度矩陣;
21、采用主成分分析法對所述去中心后的二維溫度矩陣進行降維特征提取,得到初始pca紅外圖像。
22、在一個可選的實現中,對所述二維溫度矩陣去中心化,得到去中心后的二維溫度矩陣,包括:
23、計算所述二維溫度矩陣每一列元素的平均值,得到二維溫度矩陣各列的平均值;
24、針對所述二維溫度矩陣的每一個元素,將所述元素的值減去所述元素所在列的平均值,得到所述元素的去中心后的值;
25、將二維溫度矩陣的每一個元素的值替換為相應元素的去中心后的值,得到去中心后的二維溫度矩陣。
26、在一個可選的實現中,采用主成分分析法對所述去中心后的二維溫度矩陣進行降維特征提取,得到初始pca紅外圖像,包括:
27、根據預設的多個特征值,對所述去中心后的二維溫度矩陣進行分解,得到多個特征值對應的多個特征向量;
28、針對任一特征向量,將所述特征向量與所述去中心后的二維溫度矩陣相乘,得到所述特征向量對應的特征圖像;
29、將得到的多個特征圖像進行融合,得到初始pca紅外圖像。
30、在一個可選的實現中,所述方法還包括:
31、獲取標準紅外圖像;其中,所述標準紅外圖像是利用主成分分析法對降噪后的標準紅外溫度時間序列進行特征提取得到的;所述降噪后的標準紅外溫度時間序列是對標準紅外溫度時間序列降噪得到的;所述標準紅外溫度時間序列是利用所述紅外檢測裝置對標準物體進行采集得到的;所述標準物體是與所述待測物體的材質相同且幾何尺寸相同的無缺陷樣品;
32、去除所述初始pca紅外圖像的背景,得到去背景后的紅外圖像,包括:
33、將所述初始pca紅外圖像減去所述標準紅外圖像,得到去背景后的紅外圖像。
34、在一個可選的實現中,所述基于生成對抗神經網絡的缺陷檢測模型;
35、生成器,用于對所述去背景后的紅外圖像進行增強,得到待測物體的缺陷圖像;
36、判別器,包括:3個卷積塊、2個殘差塊和2個全連接層;用于基于所述待測物體的缺陷圖像,生成所述待測物體的缺陷檢測結果;
37、所述生成器,包括:編碼器和解碼器;
38、其中,所述編碼器包含全局特征注意力模塊和多尺度空洞卷積模塊;所述編碼器用于提取去背景后的紅外圖像中的目標特征;
39、所述解碼器包含多尺度空洞卷積模塊;所述解碼器用于對目標特征進行還原,得到待測物體的缺陷圖像;
40、任一多尺度空洞卷積模塊均由一個空洞卷積層和一個映射層組成。
41、第二方面,提供了一種基于紅外圖像的缺陷檢測裝置,該裝置可以包括:
42、采集單元,用于獲取待測物體在預設時間段內各時刻的紅外溫度數據,得到紅外溫度時間序列;
43、處理單元,用于對所述紅外溫度時間序列數據進行濾波處理,得到降噪后的紅外溫度時間序列數據;
44、提取單元,用于采用主成分分析法對所述降噪后的紅外溫度時間序列數據進行降維特征提取,得到初始pca紅外圖像;
45、去除單元,用于去除所述初始pca紅外圖像的背景,得到去背景后的紅外圖像;
46、檢測單元,用于將所述去背景后的紅外圖像輸入預先訓練好的基于生成對抗神經網絡的缺陷檢測模型中,得到所述待測物體的缺陷檢測結果;其中,所述基于生成對抗神經網絡的缺陷檢測模型是基于預先構建的缺陷數據集對基于生成對抗神經網絡的缺陷檢測模型進行訓練得到的。
47、第三方面,提供了一種電子設備,該電子設備包括處理器、通信接口、存儲器和通信總線,其中,處理器,通信接口,存儲器通過通信總線完成相互間的通信;
48、存儲器,用于存放計算機程序;
49、處理器,用于執行存儲器上所存放的程序時,實現上述第一方面中任一所述的方法步驟。
50、第四方面,提供了一種計算機可讀存儲介質,該計算機可讀存儲介質內存儲有計算機程序,所述計算機程序被處理器執行時實現上述第一方面中任一所述的方法步驟。
51、本技術實現了對蜂窩夾芯復合材料或其他材料制備得到的物體的表面缺陷和近表面缺陷的精確檢測,并提高了檢測的效率以及準確率。本技術通過在紅外檢測裝置中設置陣列熱源,使被檢測工件受熱更加均勻,降低紅外采集誤差;使用生成對抗神經網絡構建缺陷檢測模型,自動學習復雜的紅外圖像特征,對紅外圖像中的缺陷進行精準識別;同時采用基于全局特征注意力模塊的生成器顯著提升紅外圖像的分辨率和清晰度,進而提高了缺陷識別的精準度。
52、本技術通過將三維矩陣轉換為二維矩陣,再進行特征提取,能夠有效的提高計算效率;通過選取多個主成分得到多個特征圖像,再進行特征圖像的融合,能夠得到包含更多特征細節且包含特征更全面的紅外圖像;將所有紅外圖像去除背景,能夠有效的去處噪聲與干擾,得到高質量的紅外圖像;基于高質量的紅外圖像進行缺陷檢測,能夠有效的提高缺陷檢測的精度、準確度與可靠度。
- 還沒有人留言評論。精彩留言會獲得點贊!