基于時空特征注意力融合的工業過程故障檢測方法和系統
本發明涉及工業過程故障檢測領域,提出一種基于時空特征注意力融合的工業過程故障檢測方法和系統,適用于工業過程的預警和監控。
背景技術:
1、在現代工業中,工業4.0和相關技術正迅速發展。工業過程故障檢測是確保生產持續高效的關鍵。及時發現和識別設備故障或異常情況可以避免生產中斷、降低維護成本,提高生產效率和產品質量。這些技術不僅增強了生產線的穩定性和可靠性,還減少了資源和能源的浪費,對企業的經濟效益和環境影響至關重要。在這個背景下,過程監控成為維持工業過程穩定運行的關鍵技術,對安全生產和產品質量至關重要。
2、現有技術多依賴傳統統計模型和機器學習,對復雜非線性非高斯數據處理效果有限。相比之下,深度學習展現了巨大潛力,通過映射數據到潛在空間描述過程特征,這是特征提取的關鍵。然而,由于工業數據復雜多樣和不同模型表現,深度學習在特征提取受限,難以完整映射符合數據的特征。
3、自編碼器和長短期記憶網絡作為典型的深度學習模型,在無監督學習中展現出顯著的性能優勢,特別在故障檢測領域。然而,在提取時間序列數據的時空特征方面仍然面臨挑戰,尤其是在處理多維數據時。有研究者利用卷積神經網絡在圖像處理中的優勢,通過格拉姆角場將一維時間序列映射為二維來執行故障檢測。這種方法雖然注重時間特性,但通常忽略了空間特征的重要性,而另一些方法則偏重空間特性而忽略時間特性。為了解決時空特征提取不足的問題,提出了一種基于時空特征注意力融合的工業過程故障檢測方法。
技術實現思路
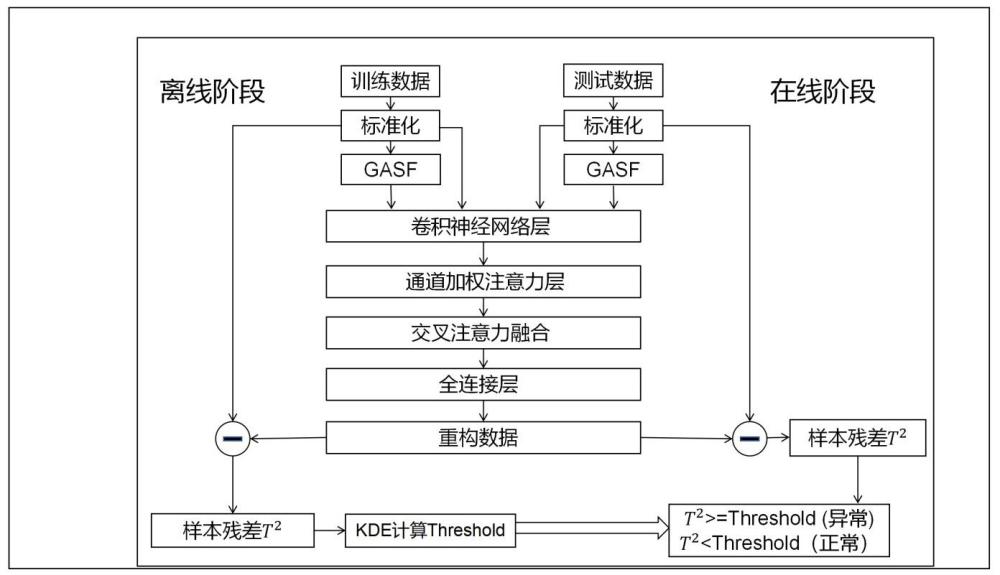
1、本發明提出了基于時空特征注意力融合的故障檢測模型,在空間特征提取方面,使用多通道一維卷積處理原始數據,以提取豐富的空間特征。在時間特征提取方面,首先將原始數據轉換為格拉姆矩陣,然后利用二維卷積提取數據的時序特征。為了進一步融合和增強特征表達,采用通道加權注意力機制評估每個通道的重要性,時間特征主要涉及數據在時間上的變化,而空間特征則關注數據在空間維度上的分布和變化。考慮到時間特征和空間特征在數據表征中提供不同但互補的信息,采用交叉注意力來進行時空融合,以確保模型能夠有效地結合空間特征和時序特征,從而提高故障檢測的精確度和可靠性。該方法包括以下步驟:
2、s1,離線階段,獲取工業過程中的歷史多變量時間序列數據集,其中m代表采樣的個數,n代表變量的個數;
3、s2,對數據集中各特征變量進行對應的數據樣本進行標準化處理,得到x;
4、s3,將數據x轉化為格拉姆矩陣模式xg;
5、s4,對數據x進行多通道的一維卷積特征提取,提取豐富的空間特征信息,得到的特征數據x1;對數據xg進行多通道的二維卷積進行特征提取,提取豐富的時間特征信息,得到特征數據xg2;
6、s5,利用通道加權注意力對特征x1和xg2進行處理,得到加權后的特征圖w_x1和w_xg2;
7、s6,利用交叉注意力機制對加權后的特征圖進行時空融合,得到融合后的特征圖x_f;
8、s7,x_f經過全連接層得到與原始數據x維度一致的重構特征,計算重構誤差,并將其作為步驟s4-s6構成的模型的損失函數進行反向傳播,更新模型的參數,得到新的一組參數,經過多次迭代,最終得到訓練好的故障檢測模型;
9、s8,將數據x作為輸入,利用訓練好的故障檢測模型計算出重構數據x_r,計算得到樣本殘差值,再經過核密度估計進行計算得到正常數據集的控制限;
10、s9,在線階段,使用實時采集數據x_n,進行標準化后輸入到訓練好的故障檢測模型,計算出測試數據對應的殘差值,將其與控制限進行比較,最終通過比較的結果值來判斷故障是否發生。
11、進一步的,步驟s2中標準化處理的具體公式如下;
12、;
13、其中,為數據集s中第j個特征變量對應的數據樣本的原始值,表示第j個變量對應的均值,表示為第j個變量對應的方差。
14、進一步的,步驟s3的具體實現方式如下;
15、31)將歸一化后的時間序列數據編碼為角余弦,,1,并將時間戳編碼為半徑來表示極坐標中的重新縮放的時間序列,公式如下:
16、;
17、其中表示第i個樣本的第j個變量的值,表示將進行反余弦函數轉化后的角度;
18、32)使用每個時間點的角度和的余弦值來刻畫不同時間間隔內的時間相關性,將格拉姆和角場gasf的定義如下:
19、;
20、其中表示第j個變量的第(i+1)個樣本對應的角度,將第i個樣本角度和第(i+1)樣本角度相加后用余弦函數計算其對應的值;
21、33)針對單個變量,批處理長度為l的時間序列數據,其中代表第個采樣點,所形成的二維數據集xg為:
22、。
23、進一步的,步驟s4中對數據集x和xg進行卷積特征提取,具體公式如下:
24、;
25、;
26、其中和分別為一維卷積神經網絡中第層的第i個輸入特征圖和第j個特征圖連接的卷積核和偏置項,表示第-1層的第i個輸入特征圖,為relu激活函數,是經過一次卷積運算后得到的特征圖,表示第層的第j個特征圖;和分別為二維卷積神經網絡中第層的第i個輸入特征圖和第j個特征圖連接的卷積核和偏置項,表示第-1層的第i個輸入特征圖,是經過一次二維卷積運算后得到的特征圖,表示第層的第j個特征圖。
27、進一步的,步驟s5中通過加權注意力模塊w-senet將x1轉化為w_x1,過程如下:
28、51)獲取多通道一維卷積特征提取后的特征x1,進行如下計算:
29、;
30、其中,特征上標c表示特征通道數,w表示特征的寬,h代表特征的高,代表壓縮操作,其功能是將特征大小為c,w,h壓縮至大小為c,1,1,即把和w和h壓縮為1維,這個過程由全局平均池化完成;
31、52)采用壓縮后的特征向量,進行全連接層計算得到注意力權重,將與特征進行點乘計算,再在通道維度上進行相加,得到特征加權融合后的特征圖,具體公式如下:
32、;
33、;
34、其中為relu函數,w1,w2為兩個全連接層的權重,為softmax函數,作用是確保每個通道的權重加起來為1,為注意力權重,利用函數對每個通道進行加權處理,最后乘原始特征圖,得到通道加權后的特征圖,整個過程在通道的維度進行學習,得到各個通道的重要性,最后再在通道的維度上相加起來得到通道加權融合后的特征圖;
35、w-senet將維度為c,w,h大小的特征圖x1轉化為了大小為1,w,h的特征圖w_x1,按照相同的步驟對xg2進行處理,得到w_xg2。
36、進一步的,步驟s6中交叉注意力機制的處理過程如下;
37、;
38、;
39、其中代表通道加權后的時間特征圖,將其用于計算鍵(k)和值(v),是鍵的維度,而對于代表通道加權后的空間特征圖,用于計算其查詢矩陣q,最后經過計算得到注意力分數,softmax函數用于生成注意力權重,并且softmax的使用確保了對每個鍵的注意力權重加起來為1,最終,通過這一注意力分數計算過程得到時空特征融合后的特征x_f。
40、進一步的,步驟s7中損失函數的計算公式如下:
41、;
42、其中表示全連接層的權重,表示第i個采樣數據。
43、進一步的,步驟s8的具體實現方式如下;
44、81)將x作為輸入,輸入到訓練好的故障檢測模型當中計算重構誤差x_r,
45、=model();
46、其中,表示標準化后的輸入數據,,1,model表示訓練好的故障檢測模型,表示輸入數據經過model后的重構數據;
47、82)利用重構數據計算樣本的殘差值,具體的:
48、;
49、其中表示為第i個樣本的殘差值,經過上述公式,得到每個樣本的殘差值;
50、83)將樣本殘差值利用核密度估計進行計算,得到正常數據的控制限,具體的:假設為待求控制限的統計量,即為,實際密度概率密度函數寫為,估計的概率密度函數為:
51、;
52、其中,,...,表示的m個采樣;為核函數,為帶寬;
53、然后設置置信水平,可以從下面累計概率公式計算得到,threshold表示控制限:
54、;
55、最后,由上述步驟計算出的控制限threshold。
56、進一步的,步驟s9的具體實現方式如下;
57、使用在線階段數據x_n,將其進行標準化處理,隨后輸入到訓練好的模型當中計算殘差值,并將其與控制限threshold比較,具體的:
58、;
59、=model();
60、;
61、其中,與分別表示為數據集s的第j個變量對應的均值和方差,表示為第i個樣本第j個變量標準化后的數據,表示重構后的數據,表示第i個樣本對應的殘差值;
62、。
63、本發明還提供一種基于時空特征注意力融合的工業過程故障檢測系統,包括處理器和存儲器,存儲器用于存儲程序指令,處理器用于調用存儲器中的存儲指令執行如上述技術方案所述的一種基于時空特征注意力融合的工業過程故障檢測方法。
64、通過本發明所構思的以上技術方案,與現有技術相比,能夠取得以下有益效果:
65、(1)本發明提出了一種時空特征注意力融合的故障檢測方法。采用交叉注意力機制融合時間特征和空間特征,全面捕捉原始數據的多維度特征信息,在多樣化的場景需求下實現更高的故障檢測精度。
66、(2)在變量維度上,采用多通道一維卷積進行特征提取,獲取豐富的空間特征信息。在時間維度上,將時間序列數據轉換為格拉姆角場表示的二維圖像,利用多通道二維卷積神經網絡實現了時間特征的高效提取。
67、(3)本發明構建了一種通道加權注意力機制,該機制能夠評估不同通道提取特征的重要性,并為更重要的通道分配更高的權重,實現特征的加權融合,使神經網絡更加關注關鍵信息,從而實現動態的特征選擇和優化。
- 還沒有人留言評論。精彩留言會獲得點贊!