一種針對多類型聲速剖面躍層提取的方法與流程
本發明涉及海洋環境勘測領域,尤其涉及一種針對多類型聲速剖面躍層提取的方法。
背景技術:
1、傳統的聲速躍層提取方法通常是尋找一個聲速變化梯度最低值,將超過這個梯度標準值的水層定義為聲速躍層,這種聲速躍層的計算方法由我國《海洋調查規范》所采用(2007)。《海洋調查規范第7部分:海洋調查資料交換》中規定聲速躍層閾值在淺海為0.5/s,深海為0.2/s,深度小于200m為淺海。然而,這種方法只是籠統地提出了聲速躍層計算的一般算法,對于不同海域復雜聲環境中躍層的提取存在問題。
2、國內外學者在上述規范的基礎上提出了一些躍層計算方法。比如s-t方法,將比海表要素低固定數值的深度定義為躍層上界,但是這種方法的固定數值選取由于太陽輻射以及海流和各種水體影響,比閾值選取更難以適配,并且這種方法只能尋找躍層上界無法判別躍層下界。
3、我國有學者對西北太平洋第一、二島鏈間聲速進行特征分析,發現該區域的閾值可以選擇0.05/s,且較為符合該區域躍層直觀感受。雖然相比于傳統垂直梯度法解決了過渡海域不匹配問題,但是仍有部分聲速剖面不適用于該閾值,不具備普適性。
4、有人介紹了垂直梯度法和最優分割法確定躍層上下界方法,發現對于典型意義的剖面數據,兩種方法均有效。但是對于垂直梯度最大值低于最低標準的情況,以及淺海和深海兩種標準在過渡區無法匹配情況,這兩種方法無法獲得滿意的結果,比如最優分割法具有選取點過深的缺陷。
技術實現思路
1、針對傳統最優分割算法提取聲速躍層時存在的深海和淺海的判別標準不統一、聲速躍層的提取過于離散以及對深海聲速躍層描述不準確的問題,本發明提供了一種針對多類型聲速剖面躍層提取的方法。
2、本發明的技術方案是:
3、一種針對多類型聲速剖面躍層提取的算法,可針對目標海域波浪條件作為評價指標對任意波浪能裝置進行優化或進行波浪能裝置陣列構建;
4、對不同類型海洋聲速剖面提取聲道軸,然后使用若干次最優分割算法,以聲道軸數量為躍層數量為原則,提取聲速躍層;
5、所述不同海洋聲速剖面提取聲道軸是指海洋中的數種聲速剖面可簡化分類,分為不存在聲道軸類型、單聲道軸類型、多聲道軸類型;
6、所述的使用若干次最優分割算法,是指不再只計算一次分割結果就得出躍層結果,而是通過不斷改變分割終點計算多次最優分割結果,提取結果中的連續序列,作為躍層上界;從躍層上界到聲道軸之間使用最優分割法提取躍層下界,使得躍層識別結果更加連續和準確;
7、所述的聲道軸數量為躍層數量為原則,是指在典型深海聲速剖面中聲道軸作為一個參數,參與分層結構的劃分,當有幾個滿足最低梯度要求的聲道軸就認為存在幾個完整的聲速躍層,實現躍層數量的清晰化定義。
8、進一步的,
9、具體步驟:
10、1)根據溫度、鹽度和對應深度的數據,計算得到海洋垂向聲速剖面數據;
11、2)對步驟1)得到的海洋垂向聲速剖面數據進行數據插值重采樣;
12、3)使用差分方法,計算聲速梯度;
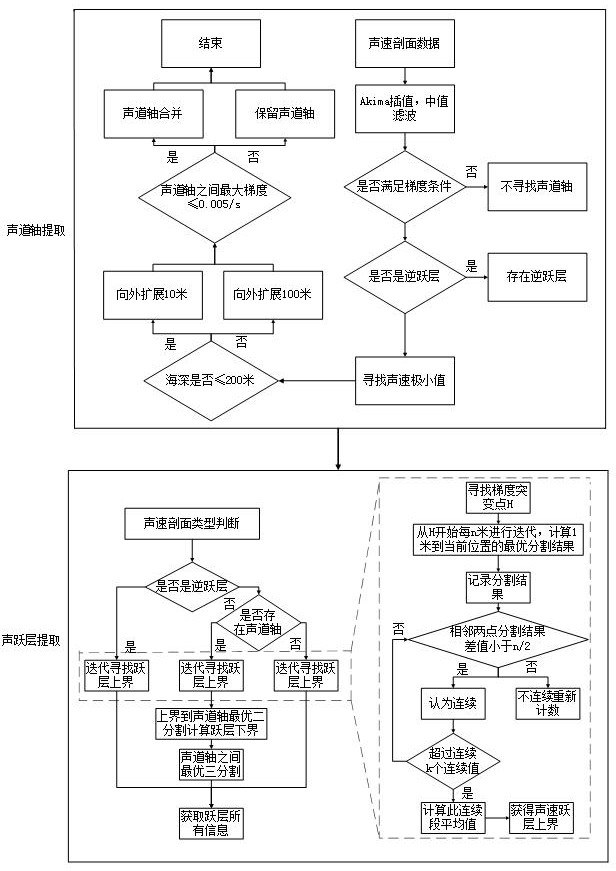
13、4)基于聲速梯度和梯度閾值尋找聲道軸;
14、5)引入聲道軸作為躍層結構判斷的參數,提取聲速躍層;獲取躍層的上下界;
15、6)計算躍層相關屬性并記錄,構建躍層相關數據集。
16、進一步的,
17、在步驟1)中,將海洋進行密集的格網點劃分,將溫度、鹽度和對應深度的數據分別帶入聲速經驗公式,得到海洋垂向聲速剖面數據,并使用多線程技術計算每一個格網點的聲速剖面,構建出全球海洋聲速場。
18、在步驟2)中,使用akima插值方法來對聲速數據點進行插值,得到一組連續的聲速值;akima插值在處理不規則數據點分布時能夠產生較為平滑的插值曲線;對插值后的聲速數據點采用三次多項式進行逼近,以獲得更加平滑的聲速剖面曲線。最后使用中值濾波,過濾掉akima插值之后產生的細微的毛刺點。
19、在步驟3)中,差分方法計算公式為
20、(1)
21、其中,g為聲速梯度;為相鄰深度點之間的聲速差;?為相鄰點之間的深度差。
22、在步驟4)中,判斷整條聲速剖面曲線最大梯度是否小于等于0.01/s,梯度的極差是否小于等于0.02/s,滿足則說明不存在躍層,不需要尋找聲道軸;第二步判斷是否是逆躍層類型,逆躍層不存在聲道軸;尋找典型深海聲道軸,選擇尋找聲速的極小值作為聲道軸;當獲取聲速極小值之后可獲得原始的聲道軸集合,對初步的聲道軸結果序列向上下分別擴展x?m,在這2x?m的區間范圍內,找到的點需要是最小聲速,否則舍棄;設置海深小于200m,x取10,海深大于200m則x取100,最終得到聲道軸的集合;
23、做完第一步篩選之后,多聲道軸類型的聲速剖面,有些聲道軸之間梯度極小不滿足產生躍層的條件,對于這種類型的聲速剖面,需要篩選每個聲道軸之間的梯度最大值是否小于0.005/s。如果滿足,說明聲道軸之間的梯度極小,對于這種聲道軸保留聲道軸聲速較小者,剔除不滿足的。
24、在步驟5)中,躍層上界的計算采用的方法為迭代計算聲速梯度突變點,以及使用最優二分割計算聲速躍層上界到聲道軸或海底得到聲速躍層下界;
25、躍層下界的判斷則分為三種情況:
26、對于存在單聲道軸類型的聲速剖面,則提供完整的聲速躍層上界、下界位置信息;對于存在雙聲道軸或者多聲道軸的聲速剖面類型,則提供對應數量的聲速躍層;對于未形成聲道軸,由于聲道軸深度未知,躍層結束位置未知,因此不提供躍層下界。
27、步驟5)包括以下步驟:
28、5-1)將水下1m處作為分割起點,將梯度突變點h作為第一次最優分割的終點進行第一次分割,然后將突變點h向下移動,直到迭代終點e,得到分割結果的序列;
29、5-2)尋找梯度突變的點h作為迭代的起點,然后使用聲道軸或者海底或者400m作為迭代終點e,從h開始每隔n?m進行一次迭代,n>0;每次迭代計算水深1m到當前位置的最優二分割結果,記錄分割結果;
30、5-3)迭代完成之后若相鄰兩點分割結果差值小于n/2的值,則認為是連續值,當連續值數目超過k時,計算這一連續段的平均值作為躍層上界;
31、5-4)尋找梯度突變點,三種情況有所不同;聲速躍層可分為三種情況:逆躍層、存在聲道軸的躍層、不存在聲道軸的躍層;逆躍層情況下,梯度突變的點h取梯度最大值所在深度,而其余兩種情況則將聲速梯度由正轉負或梯度極小值點即取二者中小值作為梯度突變點h;此外,對于步驟中各處的取值也要分情況設定;逆躍層情況下,聲速剖面n取3,k取4,未形成聲道軸聲速剖面n取5,k取3,形成聲道軸的聲速剖面n取10,k取5;
32、5-5)對于形成聲道軸的聲速剖面,使用最優分割方法將分割起點定為計算得到的躍層上界,終點定為聲道軸,得到躍層下界;最后判斷是否是多聲道軸,如果是多聲道軸并且滿足最低梯度要求,則使用最優三分割方法得到聲道軸之間的躍層。
33、在步驟6)中由上述產生的聲速躍層上下邊界,計算得到聲速躍層厚度和聲速躍層強度并記錄相關屬性信息到文件,形成相關數據集;其中聲速躍層厚度為聲速躍層上下邊界之差,聲速躍層強度為躍層上下邊界處聲速與聲速躍層厚度之比。
34、本發明的有益效果是:
35、本技術的技術方案涉及海洋聲環境中聲速躍層的識別及其特征參數的提取,主要針對于傳統最優分割算法提取聲速躍層時存在的提取范圍過深、空間分布過于零散以及多聲速躍層情況下無法準確提取問題,提出一種自適應于多種聲速剖面、多躍層的提取方法——aopm法。該方法在傳統最優分割法的基礎上,利用ssp梯度變化及相關環境參數自適應獲取閾值,從而得到滿足梯度閾值要求的聲道軸的數量,最終實現多躍層識別。根據梯度變化靈敏度,準確提取聲速躍層特征參數。該算法能夠有效準確地識別多躍層結構,還能實現多種類型聲速剖面躍層的特征提取。
36、為了克服現有躍層計算方法中躍層上下界提取不準確、閾值設置不合理、提取范圍過深而導致躍層提取誤差大、效率低、適用性差等缺陷,本算法對傳統的聲速躍層計算方法的改進包括:
37、引入聲道軸數量這一參數用來確定聲速躍層數量。利用梯度閾值搜尋聲道軸并確定聲道軸的數目,依據聲道軸個數決定躍層結構的原則確定躍層數目,從而避免出現多躍層結構無法提取的問題。
38、利用聲速梯度的變化設置自適應的閾值,實現對不同聲場環境下躍層的提取。并且構建典型聲速剖面數據集,驗證本算法在不同區域不同聲速剖面類型下的適用性,結果證明本算法對深海型、淺海型以及過渡型聲速剖面均適用。
39、將躍層上界看成季節性躍層和永久性躍層開始的地方,簡化躍層結構,并提高聲速躍層探測準確率,避免傳統方法提取躍層過深的問題。
40、使用多次最優分割的平均值替代一次最優分割結果。在改進的計算一次最優分割結果基礎上,進一步提出計算多次最優分割結果。不再單純使用一次最優分割算法,而是通過改變分割終點使用多次最優分割從而得到連續的結果序列,計算其平均值,確定躍層上邊界。
- 還沒有人留言評論。精彩留言會獲得點贊!