一種基于物候分段DTW的作物生理參數遙感時序估測方法、系統及存儲介質
本發明屬于定量遙感和作物監測,尤其涉及一種基于物候分段dtw的作物生理參數遙感時序估測方法、系統及存儲介質。
背景技術:
1、衛星遙感通過時間序列遙感植被指數揭示作物生長狀況和產量的時空維度,已成為獲取地方、區域和全球尺度作物信息的主要方法。通過數理方法和計算機技術對遙感獲取得作物波譜響應進行分析,從而反演出作物生理參數是實現作物長勢監測的具體手段。目前大多數估測模型是將植被指數與作物生理參數聯系起來,構建從觀測數據到目標參量之間的表達式。這類方法的優點是,觀測數據和目標參量之間具有明確的因果關系,可以揭示水稻株高模型中變量的作用。但這類模型的時空泛化能力較差,在不同區域或年份應用時往往估算結果存在偏差。此外,在使用反演模型適應新的年份和區域時,解決時間變化尤為重要。由于農業氣候條件和農業實踐(包括不同的播種時間、生長周期等)的不同,同一類型的兩個地塊可能具有不同的物候演變,當源訓練模型應用于目標年份和區域時,時間偏移可能導致lai估計出現誤差。
2、一些研究利用savitzky-golay濾波、傅里葉變換和小波變換等多種技術對植被指數的時間序列進行平滑處理,能夠提取最大值、最小值和拐點等關鍵節點,從而精確定位作物生長周期內的關鍵時間點,然而這種方法僅限于監測特定的作物生長階段,缺乏對作物完整生長周期的協同分析。
3、因此,亟待解決上述問題。
技術實現思路
1、發明目的:本發明的第一目的是提供一種基于物候分段dtw的作物生理參數遙感時序估測方法,該估測方法旨在克服物候不匹配現象導致作物生理參數遙感時序估測精度低的問題,實現不同農業場景下作物時間序列匹配以及作物生理參數高精度時序估測。
2、本發明的第二目的是提供一種基于冠層結構動態約束的雙極化sar圖像水稻葉面積指數估測系統。
3、本發明的第三目的是提供一種計算機存儲介質。
4、技術方案:為實現以上目的,本發明公開了一種基于物候分段dtw的作物生理參數遙感時序估測方法,包括以下步驟:
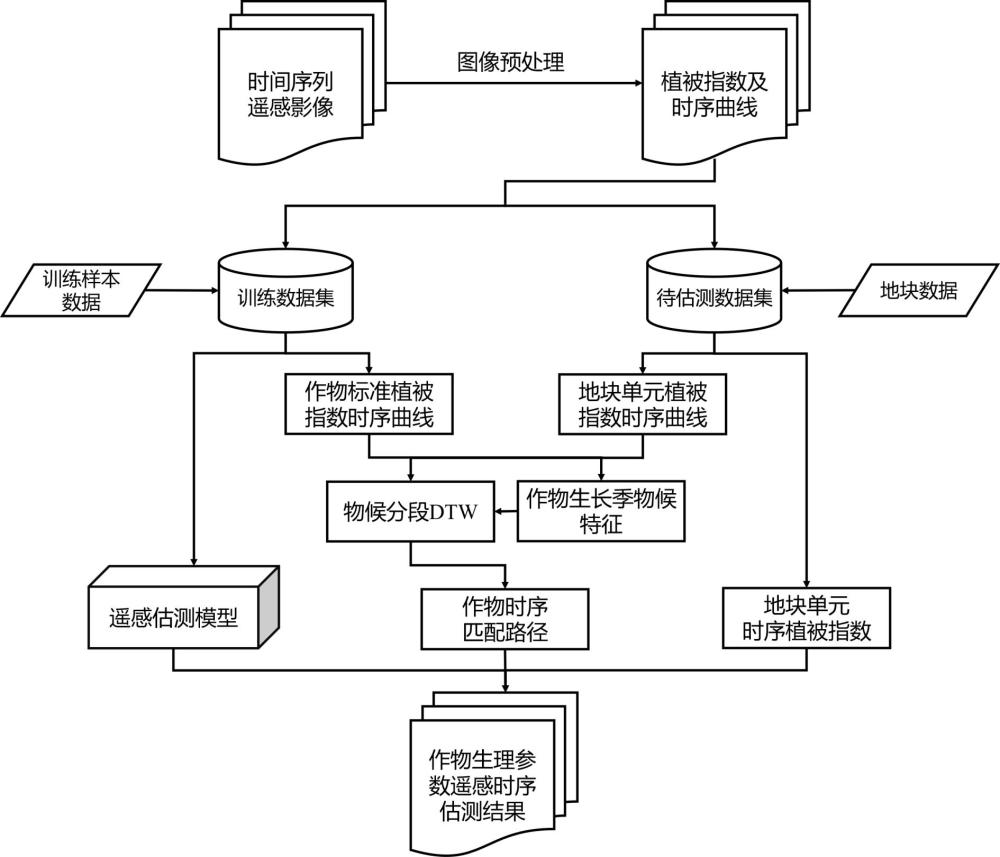
5、(1)對時間序列遙感影像進行預處理,得到處理后的時序遙感數據;
6、(2)以時序遙感數據為基礎,計算植被指數,得到植被指數時序數據集;
7、(3)結合作物樣本實測數據,構建用于估算作物生理參數的遙感估測模型;
8、(4)以地塊為基本地理單元,分別構建作物標準植被指數時序曲線和植被指數時序曲線數據集;
9、(5)以植被指數時序曲線為基礎,確定目標地塊作物生長的時間范圍;
10、(6)基于動態時間規整算法,構建物候分段時間加權動態算法,并以植被指數時序曲線為輸入獲得作物時序匹配路徑;
11、(7)根據獲得的匹配路徑對目標地塊作物的時間參數進行調整,并基于遙感估測模型和時序植被指數估算作物生理參數。
12、其中,步驟(1)中若時間序列遙感影像為光學遙感影像,預處理包括輻射定標、大氣校正、幾何校正和圖像濾波;
13、若時間序列遙感影像為微波遙感影像,預處理包括多視處理、斑點濾波、地理編碼和輻射定標。
14、優選的,步驟(3)具體包括如下步驟:
15、采用最小二乘法描述各個生育期作物生理參數與植被指數的關系,并使用多項式描述模型參數隨時間的變化關系,從而構建遙感估測模型,表達式為:
16、(1)
17、(2)
18、(3)
19、式中代表生理參數,為植被指數, k和 b分別為不同生育期最小二乘回歸模型的系數和截距,為年中天數,n為多項式的階數,和為多項式參數,通常利用最小二乘法確定。
20、再者,步驟(4)具體包括如下步驟:
21、以地塊為基本地理單元,將時序遙感數據的平均值作為特征值,并對每年的特征曲線以1天的時間間隔進行線性插值,然后利用savitaky-golay濾波來降低曲線的時間噪聲,多項式階數和時間窗口大小分別設置為4和25,獲得地塊單元的植被指數時序曲線數據集;其中,將用于構建遙感估測模型的地塊數據的植被指數時序曲線作為作物標準植被指數時序曲線。
22、進一步,步驟(5)具體包括如下步驟:
23、根據作物日歷數據,對作物早期生長范圍進行了限定,進而識別作物生長范圍的開端;在對應時間序列中提取植被指數時間序列的極小值點,并統計極小值點的數量;若極小值點的數量為0,默認限定時間序列的中點為作物生長范圍的開端;若極小值點的數量為1,則該極小值點為作物生長范圍的開端;若極小值點數量大于1,統計序列中左側極大值大于右側極大值的局部極小值的數量,若無極大值取最大值;若符合條件的極小值數量為0,選擇最早出現的極小值點作為作物生長范圍的開端;若符合條件的極小值數量為1,則該極小值點為作物生長范圍的開端;若符合條件的極小值數量大于1,選擇最早出現且符合條件的極小值點作為作物生長范圍的開端;
24、根據作物日歷數據,對作物晚期生長范圍進行了限定,進而識別作物生長范圍的結束;在對應時間序列中提取植被指數時間序列的極小值點,并統計極小值點的數量;若極小值點的數量為0,默認限定時間序列的中點為作物生長范圍的結束;若極小值點的數量為1,則該極小值點為作物生長范圍的結束;若極小值點數量大于1,統計序列中左側極大值大于右側極大值的局部極小值的數量,若無極大值取最大值;若符合條件的極小值數量為0,選擇最早出現的極小值點作為作物生長范圍的結束;若符合條件的極小值數量為1,則該極小值點為作物生長范圍的結束;若符合條件的極小值數量大于1,選擇最早出現且符合條件的極小值點作為作物生長范圍的結束。
25、優選的,步驟(6)具體包括如下步驟:
26、提取作物標準植被指數時序曲線和目標地塊的植被指數時序曲線,將作物生長范圍的開端和結束作為時序曲線的兩個分割點;選擇目標地塊作物生長范圍的中點作為該地塊植被指數時序曲線的第三個分割點,作物標準植被指數時序曲線的第三個分割點設置為目標地塊作物生長范圍中點所對應的生長天數;將分割的時間序列作為動態時間規整算法的輸入,獲得匹配路徑,并集成所有分段的匹配路徑。
27、再者,步驟(6)中所述動態時間規整算法為:
28、設作物標準植被指數時序曲線和目標地塊植被指數時序曲線分別為和時間序列和,,,由這兩個時間序列構造的距離矩陣:
29、(4)
30、式中是兩個序列之間的基距,一般取兩個序列的節點值之差的絕對值作為dtw的基距,即;
31、由距離矩陣可推導累積距離矩陣,對于中的任意元素,其值是中從到的最小累積距離,一般通過遞歸累積最小距離來計算;
32、(5)
33、(6)
34、動態時間規整算法是通過動態規劃使得累積距離最小,在動態規劃過程中,可以通過回溯獲得最佳的匹配路徑,匹配路徑用于定義和之間的映射,其中是匹配路徑的長度,的第個元素定義為。
35、進一步,步驟(7)具體包括如下步驟:
36、根據所述匹配路徑,將目標地塊植被指數時序曲線匹配到作物標準植被指數時序曲線;
37、若目標地塊植被指數時序曲線的單個點與作物標準植被指數時序曲線的單個點對應,則作物標準植被指數時序曲線上的點為目標地塊植被指數時序曲線上點的匹配點;
38、若目標地塊植被指數時序曲線的單個點與作物標準植被指數時序曲線的多個點對應,則作物標準植被指數時序曲線上點的平均點為目標地塊植被指數時序曲線上點的匹配點;
39、若目標地塊植被指數時序曲線的多個點與作物標準植被指數時序曲線的單個點對應,則作物標準植被指數時序曲線上的點均為目標地塊植被指數時序曲線上多個點的匹配點;
40、基于曲線匹配結果、植被指數、遙感估測模型估算出目標地塊作物生理參數。
41、基于相同的發明構思,本發明公開了一種基于物候分段dtw的作物生理參數遙感時序估測系統,包括:
42、預處理模塊,用于對時間序列遙感影像進行預處理,得到處理后的時序遙感數據;
43、指數計算模塊,用于以時序遙感數據為基礎,計算植被指數,得到植被指數時序數據集;
44、估測模型構建模塊,用于結合作物樣本實測數據,構建用于估算作物生理參數的遙感估測模型;
45、時序曲線構建模塊,用于以地塊為基本地理單元,分別構建作物標準植被指數時序曲線和植被指數時序曲線數據集;
46、生長時間確定模塊,用于以植被指數時序曲線為基礎,確定目標地塊作物生長的時間范圍;
47、匹配路徑獲取模塊,用于基于動態時間規整算法,構建物候分段時間加權動態算法,并以植被指數時序曲線為輸入獲得作物時序匹配路徑;
48、參數估算模塊,用于根據獲得的匹配路徑對目標地塊作物的時間參數進行調整,并基于遙感估測模型和時序植被指數估算作物生理參數。
49、本發明一種計算機存儲介質,計算機存儲介質存儲有計算機程序,該計算機程序被處理器運行,執行上述的一種基于物候分段dtw的作物生理參數遙感時序估測方法。
50、有益效果:與現有技術相比,本發明具有以下顯著優點:本發明考慮作物生長范圍和局部匹配,將dtw算法應用于時序遙感影像的作物生理參數估測研究中,實現不同農業場景下作物生理參數高精度時序估測;本發明旨在克服物候不匹配現象導致作物生理參數遙感時序估測精度低的問題,實現不同農業場景下作物時間序列匹配以及作物生理參數高精度時序估測。
- 還沒有人留言評論。精彩留言會獲得點贊!