一種基于人工智能的建筑施工現場智能監控系統的制作方法
本發明涉及建筑施工及人工智能,更具體的說是涉及一種基于人工智能的建筑施工現場智能監控系統。
背景技術:
1、目前,隨著建筑業的發展和城市化進程的加快,建筑施工項目日益增多,對施工質量和安全的要求也越來越高,施工現場的管理與監控變得尤為重要。傳統的建筑施工現場監控主要依賴人工巡查和簡單的視頻監控系統,這種方式存在以下不足之處:
2、數據處理能力有限:傳統的視頻監控系統只能記錄視頻數據,僅起到事后取證的作用,無法對現場發生的安全隱患、進度延誤等問題進行實時預警和干預,無法自動分析并識別潛在的安全隱患。
3、實時性差:人工巡查無法實現24小時不間斷監控,且效率較低,難以及時發現并響應緊急情況。且人工監控易受主觀判斷、疲勞和經驗不足等因素的影響,難以全天候、高精度地監控施工現場。
4、資源浪費:需要大量的人力資源進行監控和管理,增加了項目的成本負擔。
5、決策支持不足:現有的監控系統缺乏數據挖掘與分析功能,無法充分利用海量的施工數據進行智能分析,使得管理層難以獲取準確的現場信息,影響決策質量,從而無法實現對施工過程的全局優化。
6、為了解決上述問題,近年來出現了將人工智能技術應用于建筑施工監控的新趨勢。這些系統利用計算機視覺、機器學習等技術,能夠自動檢測異常行為、識別安全隱患,并提供實時預警。然而,現有的解決方案往往側重于單一功能,如人員識別或物體檢測,未能形成一個完整的智能化監控體系,難以滿足現代建筑施工管理的需求。
技術實現思路
1、有鑒于此,本發明提供了一種基于人工智能的建筑施工現場智能監控系統,該系統融合了多種ai技術,如計算機視覺、深度學習、物聯網(iot)以及大數據分析,旨在克服現有系統的局限性,并提升施工現場的安全性、效率和整體管理水平。
2、為了實現上述目的,本發明采用如下技術方案:
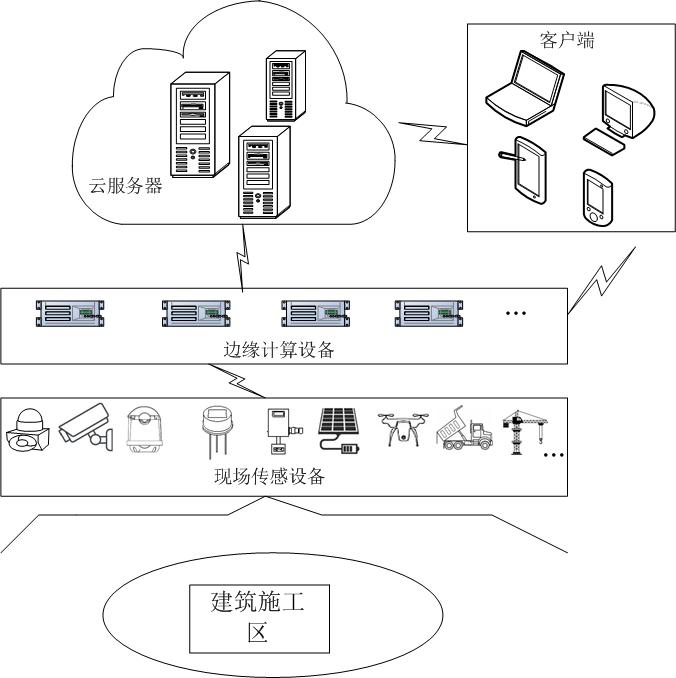
3、本發明提供一種基于人工智能的建筑施工現場智能監控系統,包括:現場傳感設備、邊緣計算設備、云端服務器和客戶終端;
4、其中,所述現場傳感設備包括:設置在施工現場的攝像頭、溫濕度傳感器、噪聲傳感器、振動傳感器和氣體傳感器;以及包括:監控無人機及加載在工程車、塔吊上的定位設備;
5、所述邊緣計算設備具有高性能處理器和gpu的計算單元,部署在施工現場用于本地預設范圍內實時初步的圖像識別和數據分析處理,并將處理后的數據傳輸給云端服務器以及將部分分析結果推送給客戶端;
6、所述云端服務器為服務器集群,采用分布式存儲系統,用于處理來自多個施工現場的邊緣計算設備的海量數據,進行數據融合、危險識別、施工進度監控,以及對視頻流、環境數據、分析結果進行分類存儲和管理;并將預警信息推送給對應的客戶終端;
7、所述客戶終端用于展示、查詢施工現場的監控數據,并接收云端服務器推送的預警信息以及接收邊緣計算設備推送的部分分析結果。
8、進一步地,所述工程車、塔吊上的定位設備,包括:
9、安裝在工程車輛的車頂或駕駛室頂部的gps和rtk模塊;以及安裝在塔吊吊臂末端或頂部的gps和rtk模塊;
10、所述gps和rtk模塊用于實時采集自身所在設備的定位數據:包括經度、緯度、高程的位置信息,以及時間戳和設備id。
11、進一步地,所述邊緣計算設備,包括:
12、采集模塊,用于采集所述攝像頭、溫濕度傳感器、噪聲傳感器、振動傳感器、氣體傳感器、監控無人機和定位設備的數據;
13、初步處理模塊,用于對采集的溫濕度傳感器、噪聲傳感器、振動傳感器和氣體傳感器數據,依次進行均值濾波、卡爾曼濾波消除噪聲,并再采用異常檢測算法dbscan或孤立森林算法將異常值刪除;
14、行為識別模塊,用于根據采集的所述攝像頭和監控無人機的圖像數據,輸入到從所述云端服務器下載的預訓練的yolov4與lstm聯合模型,輸出檢測到的違規行為;
15、熱力圖生成模塊,用于根據采集的所述攝像頭和監控無人機的圖像數據,利用所述預訓練的yolov4與lstm聯合模型,識別并跟蹤人員活動軌跡,生成熱力圖;
16、預警模塊,當所述行為識別模塊識別到存在違規行為時,以及當定位設備的數據在所述熱力圖紅色區域時,通過攝像頭的擴音模塊發出聲音預警,以及將警情推送給對應的客戶端;
17、傳輸模塊,用于將初步處理模塊處理后的數據、熱力圖上傳給云端服務器;并將行為識別模塊的違規檢測結果對應的視頻片段、預警模塊的預警信息發送給云端服務器進行存儲。
18、進一步地,所述行為識別模塊,包括:
19、數據輸入單元,將固定攝像頭和監控無人機采集的視頻流,統一圖像尺寸,并按照時間順序排列,作為輸入數據;
20、目標檢測單元,利用yolov4模型對每一幀圖像進行實時物體檢測,識別出施工現場中的對象,包括工人、設備、車輛;
21、特征提取單元,提取對象在圖像中的位置和類別;
22、時間序列建模單元,將yolov4檢測到的特征按時間順序輸入到lstm中,捕捉時間維度的特征變化,分析連續幀之間的行為模式;
23、行為分類單元,lstm模型通過分析時間序列中的特征變化,識別特定行為模式,輸出行為的類別及其對應的置信度;
24、違規行為識別單元,在lstm輸出的基礎上,設置行為識別的閾值;若輸出行為的置信度超過設定的閾值,則判定為違規行為。
25、進一步地,所述熱力圖生成模塊,包括:
26、特征跟蹤單元,利用yolov4模型的輸出結果,結合物體跟蹤算法,跟蹤每個工人在視頻中的位置變化,獲取連續的運動軌跡;
27、軌跡累積單元,將所有檢測到的人員軌跡累積到施工現場的地圖上,每個位置的軌跡累積次數將作為熱力圖的基礎數據;
28、熱力圖可視化單元,根據軌跡累積的密度生成熱力圖,使用不同顏色表示不同密度區域;紅色表示高密度區域,藍色表示低密度區域。
29、進一步地,所述云端服務器,包括:
30、數據融合存儲模塊,接收來自多個邊緣計算設備的數據流,包括視頻流、傳感器數據、熱力圖以及初步的分析結果,進行融合并存儲;
31、危險識別與預警模塊,通過計算機視覺算法分析施工現場的視頻數據,識別潛在的安全隱患,并在識別出危險情況時發出警報;
32、施工進度監控模塊,用于基于數據分析判斷施工進度;
33、智能決策支持模塊,通過其他各個模塊的分析結果,提供優化施工方案、預測工期延誤、調配資源的決策支持。
34、進一步地,所述云端服務器,還包括:
35、深度學習模型訓練與優化模塊,用于執行預訓練模型,還用于持續優化和再訓練深度學習模型,以應對施工現場動態變化和不斷更新的風險場景;
36、進一步地,所述數據融合存儲模塊,包括:
37、數據接收與分類單元,接收數據并按照源類型進行初步分類,進入對應的數據處理隊列;
38、時空數據融合單元,采用時空數據融合算法將不同來源的數據在時間和空間維度上進行融合;
39、分布式存儲單元,采用hdfs或者ceph分布式存儲系統,對大量的原始數據和處理后的融合數據進行分類存儲。
40、進一步地,所述危險識別與預警模塊,包括:
41、視頻輸入單元,將連續的包含人物多幀視頻輸入到c3d模型中進行時空特征提取,生成一系列時空特征向量;
42、行為分析單元,將所述時空特征向量輸入到transformer模型中,通過自注意力機制分析視頻中的長時間行為模式;
43、風險識別單元,根據分析結果,結合對應時間內的溫濕度數據,識別出隨著時間推移積累的人員疲勞潛在風險,并在識別出危險情況時發出警報。
44、進一步地,所述施工進度監控模塊,包括:
45、數據收集單元,從施工管理系統中獲取施工計劃,包括各階段的預計完成時間和任務描述;以及收集現場數據,包括:從現場傳感器、邊緣計算設備收集的施工設備運行時間、材料使用量;
46、時間序列分析單元,將現場數據與施工計劃進行時間序列對比,判斷實際進度與預期進度之間的偏差。
47、進一步地,所述云端服務器,還包括:
48、人工交互模塊,用于接收所述客戶端的操作指令,實時展示查看施工現場、以及生成分析報告。
49、經由上述的技術方案可知,與現有技術相比,本發明公開提供了一種基于人工智能的建筑施工現場智能監控系統,通過結合現場數據采集、邊緣計算處理和云端分析,實現了對建筑施工現場的全面監控和智能決策支持。系統能夠實時檢測安全隱患,優化施工進度,并為施工管理人員提供精準的決策支持,顯著提升施工項目的安全性和效率。
- 還沒有人留言評論。精彩留言會獲得點贊!