一種立體倉庫用智能出入庫管理系統及方法與流程
本發明屬于立體倉庫領域,涉及出入庫管理技術,具體是一種立體倉庫用智能出入庫管理系統及方法。
背景技術:
1、立體倉庫是指采用垂直堆垛技術,以最大程度地利用垂直空間的倉庫類型,通常使用自動化設備,如自動堆垛機、輸送帶和機器人等,以實現貨物的高效存儲和檢索,立體倉庫的設計通常考慮到最大化存儲能力、最小化貨物搬運距離、時間和提供實時的庫存可視化,出入庫管理要求跟蹤和管理貨物的進出過程,優化貨物的存儲和檢索路徑,提供實時的庫存監控和預警,同時還能生成分析報告和提供決策支持,通過智能出入庫管理立體倉庫將實現高效的貨物流動,減少人為錯誤和損失并提高工作效率;
2、當前技術背景下,立體倉庫的倉儲空間使得倉庫中縱向空間的利用率大幅提升,然而在貨物入庫及貨物堆垛過程中,存在貨物堆垛位置與貨物安全存儲要求不匹配,倉儲空間利用率低下等問題,因此,如何將倉儲位置與貨物進行智能匹配以實現倉儲空間利用最大化是關鍵問題所在;
3、為此,我們提出一種立體倉庫用智能出入庫管理系統及方法。
技術實現思路
1、針對現有技術存在的不足,本發明目的是提供一種立體倉庫用智能出入庫管理系統及方法。
2、本發明所要解決的技術問題為:
3、如何將倉儲位置與貨物進行智能匹配以實現倉儲空間的高效利用。
4、本發明的目的可以通過以下技術方案實現:
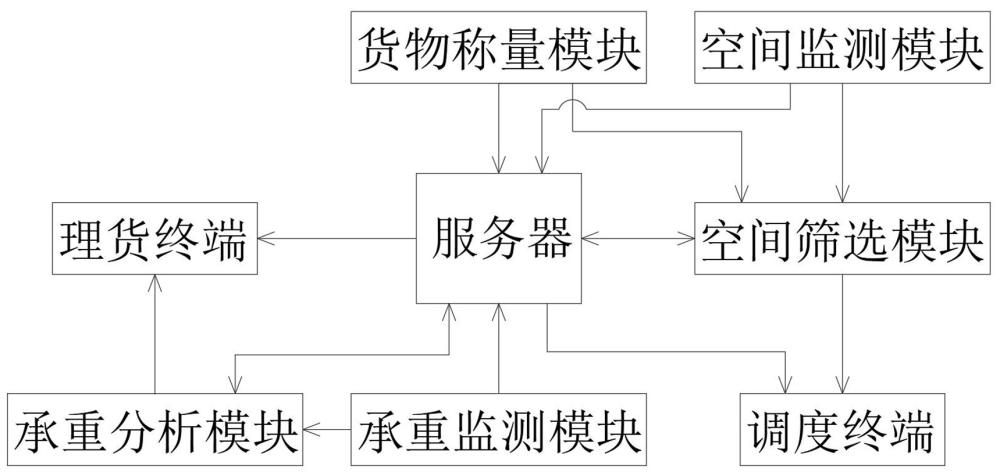
5、第一方面,一種立體倉庫用智能出入庫管理系統,包括貨物稱量模塊、空間監測模塊、空間篩選模塊、承重監測模塊、承重分析模塊、調度終端、理貨終端和服務器,所述貨物稱量模塊用于對預定入庫的貨物進行稱重及規格測量,得到待入庫貨物的貨物規格數據,貨物規格數據通過服務器發送至空間篩選模塊;所述空間監測模塊用于對倉儲區進行實時監測,得到各個倉儲空間的實時倉儲信息,實時倉儲信息通過服務器發送至空間篩選模塊;
6、所述空間篩選模塊用于篩選與待入庫貨物匹配的倉儲空間,篩選得到待入庫貨物的倉儲目標位置,待入庫貨物的倉儲目標位置通過服務器發送至調度終端,所述調度終端用于調度運輸設備將待入庫貨物運送至倉儲目標位置完成貨物入庫操作;
7、所述承重監測模塊用于對各個倉儲空間中堆垛貨物的重量分布進行監測,得到各個倉儲空間的象限實時承重值,各個倉儲空間的象限實時承重值通過服務器發送至承重分析模塊;所述承重分析模塊用于對倉儲空間中堆垛貨物的重心進行分析,生成堆垛正常信號或堆垛異常信號,堆垛正常信號或堆垛異常信號通過服務器發送至理貨終端;若所述理貨終端接收到堆垛異常信號,則控制理貨設備前往對應倉儲空間調節堆垛貨物的放置情況,若所述理貨終端接收到堆垛正常信號,則不進行任何操作。
8、進一步地,貨物規格數據包括待入庫貨物的貨物空間長度、貨物空間寬度、貨物空間高度、實際貨物質量以及貨物易損系數;
9、實時倉儲信息包括各個倉儲空間的空間類型、承重臨界值、實時空間承重值、空間邊界坐標和貨物邊緣坐標。
10、進一步地,所述空間監測模塊的監測過程具體如下:
11、將立體倉庫的倉儲區中若干數量的多層貨架根據貨架分層劃分為若干倉儲空間,根據貨架儲物層所處的高度將倉儲空間劃分為下層倉儲空間、中層倉儲空間和上層倉儲空間;
12、以倉儲空間的底部中心位置作為原點構建空間直角坐標系,獲取倉儲空間的空間邊界坐標和貨物邊緣坐標。
13、進一步地,所述空間篩選模塊的篩選過程包括:
14、獲取待入庫貨物的貨物空間長度hc、貨物空間寬度hk、貨物空間高度hg、實際貨物質量hz以及貨物易損系數ys;
15、通過公式計算待入庫貨物的堆垛風險值fh,公式具體如下;
16、fh={hz×s1+[hz/(hc×hk×hg)]×s2}×ys;
17、其中,s1和s2為固定數值的權重系數,s1和s2的數值均大于零且s1+s2=1;
18、將待入庫貨物的堆垛風險值與堆垛風險區間進行比對;
19、若堆垛風險值屬于第一堆垛風險區間,則優先待入庫貨物的優先堆垛位置為上層倉儲空間;
20、若堆垛風險值屬于第二堆垛風險區間,則優先待入庫貨物的優先堆垛位置為中層倉儲空間;
21、若堆垛風險值屬于第三堆垛風險區間,則優先待入庫貨物的優先堆垛位置為下層倉儲空間。
22、進一步地,第一堆垛風險區間的取值均小于第二堆垛風險區間的取值,第二堆垛風險區間的取值均小于第三堆垛風險區間的取值,堆垛風險區間的取值均大于零。
23、進一步地,所述空間篩選模塊的篩選過程還包括:
24、根據待入庫貨物的優先堆垛位置篩選對應空間類型的倉儲空間,獲取對應倉儲空間的承重臨界值和實時空間承重值;
25、將實時空間承重值與待入庫貨物的實際貨物質量相加計算得到倉儲空間的預估空間承重值,將倉儲空間的預估空間承重值與承重臨界值進行比對;
26、若預估空間值大于承重臨界值,則篩除此倉儲空間并選取另一倉儲空間重復比對過程;
27、若預估空間值小于等于承重臨界值,則獲取倉儲空間的空間邊界坐標和貨物邊緣坐標。
28、進一步地,所述空間篩選模塊的篩選過程還包括:
29、根據倉儲空間的貨物邊緣坐標劃分得到已使用單元格,根據空間邊界坐標劃分得到一個或若干個未使用單元格,獲取各個未使用單元格的倉儲預留長度、倉儲預留寬度和倉儲預留高度;
30、將未使用單元格的倉儲預留長度與待入庫貨物的貨物空間長度進行比對;
31、若倉儲預留長度的數值小于貨物空間長度的數值,則篩除此未使用單元格并選取另一未使用單元格重復比對過程;
32、若倉儲預留長度的數值大于等于貨物空間長度的數值,則將未使用單元格的倉儲預留寬度與待入庫貨物的貨物空間寬度進行比對;
33、若倉儲預留寬度的數值小于貨物空間寬度的數值,則篩除此未使用單元格并選取另一未使用單元格重復比對過程;
34、若倉儲預留寬度的數值大于等于貨物空間寬度的數值,則將未使用單元格的倉儲預留高度與待入庫貨物的貨物空間高度進行比對;
35、若倉儲預留高度的數值小于貨物空間高度的數值,則篩除此未使用單元格并選取另一未使用單元格重復比對過程;
36、若倉儲預留高度的數值大于等于貨物空間高度的數值,則選定該倉儲空間作為待入庫貨物的倉儲目標位置;
37、其中,若倉儲空間中所有未使用單元格均被篩除,則篩除此倉儲空間并選取另一倉儲空間重復比對過程。
38、進一步地,所述承重監測模塊的監測過程具體如下:
39、以各個倉儲空間的底部中心位置為原點構建空間直角坐標系,根據坐標系的象限分布規則劃分得到四個象限空間,分別標記為第一象限空間、第二象限空間、第三象限空間和第四象限空間,其中,第一象限空間對應坐標系的右上區域,第二象限空間對應坐標系的左上區域,第三象限空間對應坐標系的左下區域,第四象限空間對應坐標系的右下區域;
40、通過設置于各個倉儲空間底部的壓力傳感器獲取倉儲空間中各個象限空間的象限實時承重值。
41、進一步地,所述承重分析模塊的分析過程具體如下:
42、獲取各個倉儲空間的第一象限實時承重值xzⅰ、第一象限實時承重值xzⅱ、第一象限實時承重值xzⅲ和第一象限實時承重值xzⅳ;
43、根據公式計算倉儲空間的重心偏移系數dp,公式具體如下:
44、dp=|(xzⅰ+xzⅱ)-(xzⅲ+xzⅳ)|+|(xzⅰ+xzⅳ)-(xzⅱ+xzⅲ)|;
45、將倉儲空間的重心偏移系數與重心偏移區間進行比對;
46、若倉儲空間的重心偏移系數屬于第一重心偏移區間,則生成堆垛正常信號;
47、若倉儲空間的重心偏移系數屬于第二重心偏移區間,則生成堆垛異常信號;
48、其中,第一重心偏移區間和第二重心偏移區間的取值均大于零,第一重心偏移區間的取值均小于第二重心偏移區間的取值。
49、第二方面,一種立體倉庫用智能出入庫管理方法,管理方法具體步驟包括:
50、步驟s101,貨物稱量模塊對預定入庫的貨物進行稱重及規格測量,得到待入庫貨物的貨物規格數據,空間監測模塊對倉儲區進行實時監測得到各個倉儲空間的實時倉儲信息;
51、步驟s102,空間篩選模塊篩選與待入庫貨物匹配的倉儲空間,得到待入庫貨物的倉儲目標位置,調度終端根據倉儲目標位置調度運輸設備完成貨物入庫操作;
52、步驟s103,承重監測模塊對各個倉儲空間中堆垛貨物的重量分布進行監測,得到各個倉儲空間的象限實時承重值,承重分析模塊對倉儲空間中堆垛貨物的重心進行分析,生成堆垛正常信號或堆垛異常信號;
53、步驟s104,若理貨終端接收到堆垛異常信號,則控制理貨設備前往對應倉儲空間調節堆垛貨物的放置情況,若接收到堆垛正常信號,則不進行任何操作。
54、綜上所述,由于采用了上述技術方案,本發明的有益效果是:
55、1、本發明首先通過貨物稱量模塊對預定入庫的貨物進行稱重及規格測量,得到待入庫貨物的貨物規格數據發送至空間篩選模塊,還通過空間監測模塊對倉儲區進行實時監測,得到各個倉儲空間的實時倉儲信息發送至空間篩選模塊,然后利用空間篩選模塊篩選與待入庫貨物匹配的倉儲空間,得到待入庫貨物的倉儲目標位置發送至調度終端,再由調度終端調度運輸設備將待入庫貨物運送至倉儲目標位置完成貨物入庫操作;
56、2、本發明還利用承重監測模塊對各個倉儲空間中堆垛貨物的重量分布進行監測,得到各個倉儲空間的象限實時承重值發送至承重分析模塊,并通過承重分析模塊對倉儲空間中堆垛貨物的重心進行分析,生成堆垛正常信號或堆垛異常信號發送至理貨終端,最終通過理貨終端調節倉儲空間中堆垛貨物的放置情況,本發明實現倉儲位置與貨物的智能匹配使得倉儲空間利用最大化。
- 還沒有人留言評論。精彩留言會獲得點贊!