成像數據校準方法、電子設備、存儲介質及程序產品與流程
本發明涉及圖像處理領域,具體是一種成像數據校準方法、電子設備、存儲介質及程序產品。
背景技術:
1、錐束ct(cone?beam?ct,cbct)在醫學影像領域具有重要應用,其成像質量的好壞直接影響到后續的診斷和治療效果。為了保證成像的準確性,幾何校準技術在cbct系統中具有至關重要的作用。ct幾何校準的目的是精確測量射源、探測器以及旋轉機架組件之間的相對幾何位姿關系。這一幾何關系將作為濾波反投影(filtered?back?projection,fbp)重建算法的輸入參數,影響圖像的最終質量。
2、在ct成像系統中,射源與探測器的幾何關系可以用小孔成像相機模型等效表示,其中射源相當于焦點,探測器相當于像平面。射源與探測器之間的內在幾何關系可以通過一個3x3矩陣(內參矩陣)來表征,而在ct掃描過程中,射源與探測器圍繞掃描對象中心軸進行旋轉,其外在的幾何位置變化可以通過一個3x4矩陣(外參矩陣)來描述。
3、傳統的ct幾何校準方法主要有以下幾種:
4、1.直接人工測量方法:通過人工測量的方式獲取幾何參數。此方法盡管可以在設備安裝和調試時使用,但其缺點顯而易見,即測量過程耗時費力,且難以保證高精度,容易受人為誤差的影響。
5、2.已知模體測量方法:使用具有已知幾何參數的校準模體進行校準。這種方法通過預先測定模體的幾何參數,利用校準模體的幾何特征與ct系統的投影特征數據進行三維到二維的匹配關系(3d-2d匹配),從而實現校準。常用的模體形狀為圓筒形。然而,該方法存在一定局限性,模體幾何參數的準確性需要通過其他方式測量,并且特征的匹配一般依賴于特定的編碼技術。
6、目前,隨著ct技術的不斷發展,針對幾何校準的研究正逐步朝著高精度、自動化和智能化方向發展,如何更高效、更精準地完成ct系統的幾何校準成為了亟需解決的問題。
技術實現思路
1、本發明的目的在于提供一種成像數據校準方法、電子設備、存儲介質及程序產品,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:
3、一種成像數據校準方法,其特征在于,包括:處理器和存儲器,所述存儲器中存儲有計算機程序,當所述計算機程序被所述處理器執行時,所述計算機程序與所述處理器協同執行圖像校正過程,所述圖像校正過程包括以下步驟:
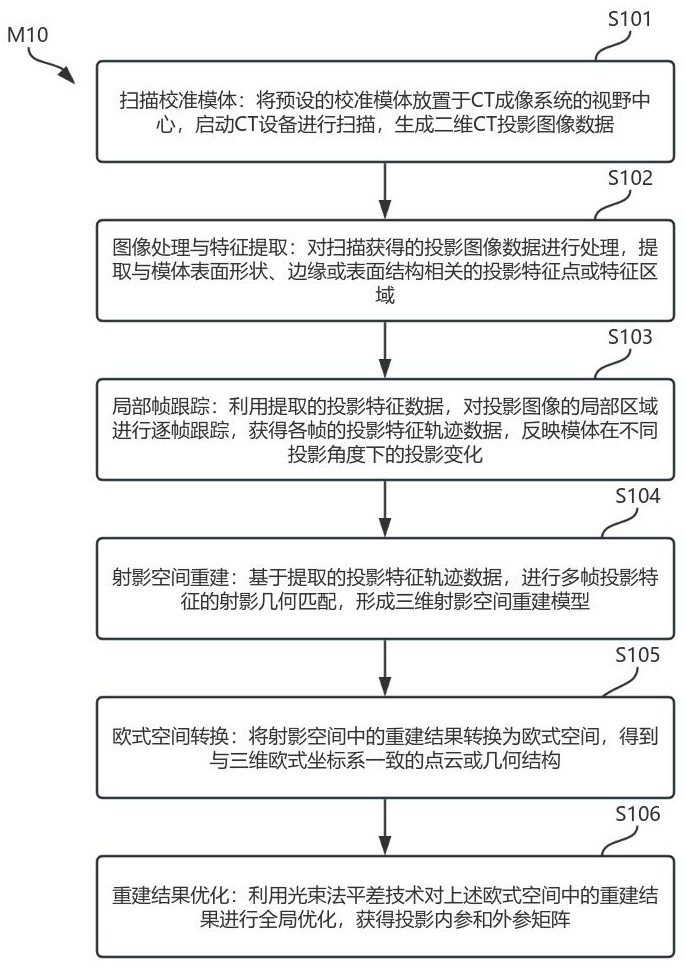
4、掃描校準模體:將預設的校準模體放置于ct成像系統的視野中心,啟動ct設備進行掃描,生成二維ct投影圖像數據;
5、圖像處理與特征提取:對掃描獲得的投影圖像數據進行處理,提取與模體表面形狀、邊緣或表面結構相關的投影特征點或特征區域;
6、局部幀跟蹤:利用提取的投影特征數據,對投影圖像的局部區域進行逐幀跟蹤,獲得各幀的投影特征軌跡數據,反映模體在不同投影角度下的投影變化;
7、射影空間重建:基于提取的投影特征軌跡數據,進行多幀投影特征的射影幾何匹配,形成三維射影空間重建模型;
8、歐式空間轉換:將射影空間中的重建結果轉換為歐式空間,得到與三維歐式坐標系一致的點云或幾何結構;
9、重建結果優化:利用光束法平差技術對上述歐式空間中的重建結果進行全局優化,獲得投影內參和外參矩陣。
10、作為本發明進一步的方案:所述的校準模體為固定間隔鑲嵌有鋼珠的圓筒模體。
11、作為本發明進一步的方案:所述投影特征的投影軌跡的特征匹配方法,包括以下步驟:
12、將每個投影特征在前后幀上的位置串聯起來,形成投影特征在探測器上的軌跡;
13、針對任一特征,基于該特征在當前幀和下一幀的投影位置變動較小且前后幀的位移變化一致,判斷當前幀和下一幀中同一特征的投影。
14、作為本發明進一步的方案:基于已確定的所述投影特征的投影軌跡,跨多幀進行特征匹配,找出兩幀之間的特征匹配對。
15、作為本發明進一步的方案:所述的射影空間重建過程包括以下步驟:
16、通過運動跟蹤獲取局部多幀圖像之間的特征匹配關系;
17、利用特征點匹配和極幾何約束,計算幀間的基礎矩陣;
18、根據基礎矩陣恢復投影物體的相對深度;
19、將投影特征的二維坐標齊次化,再與其相對深度相乘,獲得對應的三維坐標;
20、對獲得的三維坐標進行排列成矩陣,并在行和列上反復執行歸一化操作;
21、通過奇異值分解計算,得到一系列3×4投影矩陣和四維空間點的坐標。
22、作為本發明進一步的方案:所述的歐式空間轉換包括以下步驟:
23、通過射影空間重建得到一系列處于四維射影空間中的投影矩陣;
24、基于射影空間中的絕對二次曲線在任何投影視角下具有的不變性,構造一個二次型,并通過非線性最小二乘法優化目標函數,以求解內參矩陣;
25、根據求解得到的內參矩陣,進行從射影空間到歐式空間的變換,其中,通過內參矩陣與投影矩陣的反向計算,獲取外參矩陣,再結合外參矩陣將射影空間中的三維特征點轉換為歐式空間中的三維特征點。
26、作為本發明進一步的方案:所述的重建結果優化過程包括以下步驟:
27、采用光束法平差的方法對內參矩陣、外參矩陣及三維特征點進行整體約束優化;
28、通過最小化投影誤差的優化目標函數,實現對投影特征點位置與三維特征點投影坐標之間誤差的最小化,其中投影誤差優化目標函數為:將實際投影特征點位置與通過內參矩陣、外參矩陣和三維特征點計算得到的投影點位置之間的差異最小化;
29、對外參矩陣進行分解,得到旋轉矩陣和平移向量,其中平移向量代表射源位置,施加共軸圓周運動約束,確保每一個外參矩陣的平移向量位于同一圓周上;
30、通過最小化射源位置到旋轉中心的距離差異,進一步優化平移向量的約束條件,減少射源位置與旋轉中心距離的偏差。
31、一種電子設備,包括:
32、存儲器,所述存儲器存儲執行指令;以及
33、處理器,所述處理器執行所述存儲器存儲的執行指令。
34、一種可讀存儲介質,所述可讀存儲介質中存儲有計算機程序。
35、一種計算機程序產品,所述計算機程序產品包括計算機程序。
36、與現有技術相比,本發明的有益效果是:
37、在傳統的一些方法中,往往需要預先對模體本身的幾何數據進行測量。然而,這種測量過程本身就可能引入誤差。比如,測量工具的精度限制、測量人員操作的不穩定性等因素,都可能導致測量得到的模體幾何數據不準確。而且,模體在使用過程中還可能因為各種環境因素或者自身材料特性而發生變形,這種變形后的幾何數據如果沒有被及時更新,就會對后續的?ct?幾何校準產生負面影響。而本方法無需預先測量模體幾何數據,就直接避免了這些因為模體本身幾何誤差(無論是測量階段產生的還是后續變形導致的)而傳導至ct?幾何校準過程中所產生的誤差,從而提高了?ct?校準的準確性和可靠性。
38、傳統做法中涉及三維到二維的特征匹配,這是一個相對復雜且難度較大的過程。它需要在不同維度的空間數據中去尋找特征的對應關系,由于維度的跨越,數據的結構和特征的表現形式都有較大的變化,這使得匹配過程容易出現錯誤和不準確的情況。
39、而本方法替換為局部幀二維到二維的特征匹配,也就是專注于圖像特征匹配。在二維圖像層面上,特征的識別和匹配技術已經發展得相當成熟。例如,現有的圖像特征提取算法可以高效地提取出圖像中的邊緣、角點、紋理等特征信息,而且針對這些二維特征的匹配算法也有很多經過實踐檢驗的高效方法。這些算法在處理圖像數據時具有很強的魯棒性,即對圖像中的噪聲、光照變化、部分遮擋等干擾因素具有較強的抵抗能力,能夠在復雜的圖像環境中穩定地實現特征匹配,從而保證了整個流程的準確性和穩定性。
40、?當需要管理模體本身幾何數據庫時,這需要投入大量的人力和物力資源。一方面,需要建立完善的數據存儲系統來保存不同模體的幾何數據,包括數據的錄入、整理、更新等操作都需要專門的人員負責。另一方面,隨著模體數量的增加和使用過程中的變化,數據庫的維護成本會不斷上升。而且,如果工程師在選擇模體進行校準時出現錯誤,例如選擇了與實際設備不匹配的模體或者使用了有缺陷的模體幾何數據,就會導致校準錯誤,進而影響整個?ct?系統的性能。
41、本方法不需要管理這樣的模體本身幾何數據庫,這就直接降低了管理成本。不再需要擔心數據庫維護的相關問題,同時也避免了因工程師在眾多模體數據中選擇失誤而導致的校準錯誤風險,從流程簡化和風險防控兩個方面都帶來了積極的影響。
- 還沒有人留言評論。精彩留言會獲得點贊!