一種基于深度學習的靜止衛星和極軌衛星數據融合方法
本發明涉及衛星數據融合,具體涉及一種基于深度學習的靜止衛星和極軌衛星數據融合方法。
背景技術:
1、衛星遙感技術在地球觀測和環境監測中發揮著不可替代的作用。然而,單一衛星數據在空間和時間分辨率上存在局限,難以滿足現代科學研究和實際應用的需求。
2、靜止衛星保持相對于地球表面固定的位置,能夠持續監測同一地區,提供連續、不間斷的數據,這對于天氣預報、氣象監測和災害預警至關重要。靜止衛星的高時間分辨率允許頻繁更新圖像和數據,實時捕捉快速變化的現象。其廣覆蓋范圍和大視野使得一個衛星可以監測地球表面的大片區域,特別是赤道附近的地區。靜止衛星雖然具有高時間分辨率和廣覆蓋范圍的優勢,但也存在顯著缺點。首先,由于位于地球上空約36,000公里的同步軌道,靜止衛星的空間分辨率通常較低,無法提供高細節的圖像。尤其是,靜止衛星直接俯瞰赤道地區,對高緯度地區的觀測角度低,導致圖像和數據的質量差,觀測圖像存在幾何失真和分辨率嚴重降低的問題。相比之下,極軌衛星沿近極地軌道運行,覆蓋地球表面的不同區域,能夠提供覆蓋全球的數據。極軌衛星的優勢在于提供高空間分辨率的數據,可以捕捉地表細節。然而,其時間分辨率較低,觀測頻次較低,不適合實時監測。靜止衛星和極軌衛星的數據具有互補性,通過融合兩者的數據,可以有效提升遙感數據的時空分辨率,實現更全面、準確的地球觀測。
3、深度學習技術在圖像處理和時間序列分析中表現出色。利用深度學習模型,可以有效提取和融合多源衛星數據的時空特征。目前已有的深度學習多源衛星數據融合方法僅針對某一特定的數據產品,如海霧產品、氣溫產品等,然而未有針對衛星遙感一級數據產品,即多光譜通道數據的時空融合方法。一級數據產品是后續高級數據產品生成的基礎。許多二級和三級數據產品,如植被指數、土壤濕度、海表溫度等,都由一級數據反演得到。
4、因此,現需要能夠更加全面、準確地進行地球觀測的基于深度學習的靜止衛星和極軌衛星數據融合方法。
技術實現思路
1、本發明的主要目的在于提供一種基于深度學習的靜止衛星和極軌衛星數據融合方法,以解決現有技術中不能全面、準確地進行地球觀測的問題。
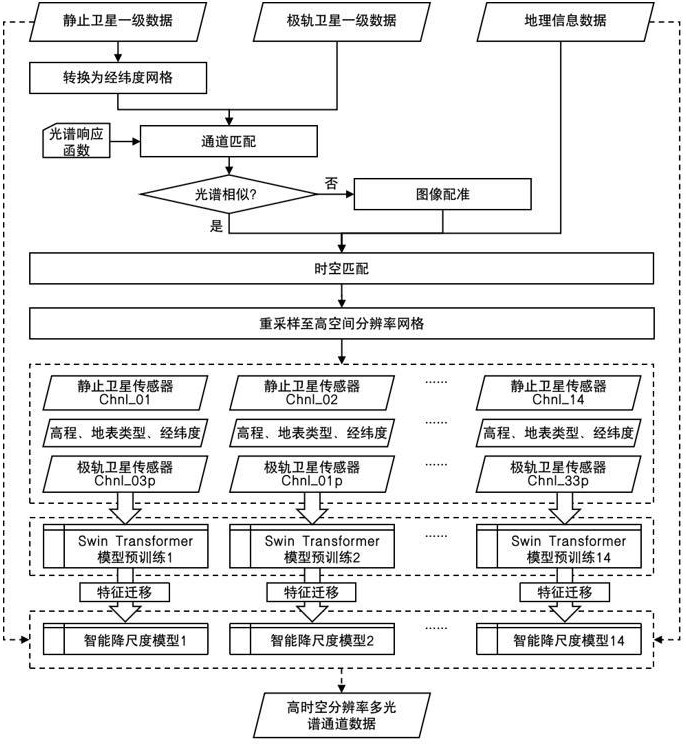
2、為實現上述目的,本發明提供了一種基于深度學習的靜止衛星和極軌衛星數據融合方法,具體包括如下步驟:
3、s1,下載靜止衛星數據、極軌衛星數據和地理信息數據,靜止衛星數據和極軌衛星數據均包括:衛星傳感器原始數據和衛星地理信息數據,地理信息數據包括:地表高程數據和地表類型數據;
4、s2,對衛星傳感器原始數據進行校準與糾正,從衛星地理信息數據中獲取太陽天頂角、太陽方位角、衛星天頂角和衛星方位角。
5、s3,根據傳感器各通道的中心波段確定與每個靜止衛星傳感器通道最接近的極軌衛星傳感器通道,進一步根據光譜響應函數利用光譜角度判斷靜止衛星與極軌衛星最相近傳感器通道的相似程度,判斷為光譜相似的情況按照s4進行時空匹配后直接進入s6步驟,判斷為光譜不相似的情況執行s4后需執行s5步驟。
6、s4,根據衛星數據名稱中的時間信息找到目標范圍內同時掃描的靜止衛星和極軌衛星數據,并按照步驟s3所確定的對應通道順序制作靜止衛星與極軌衛星數據對,將靜止衛星和極軌衛星數據統一至高空間分辨率經緯度網格。
7、s5,使用最小化概率分布距離方法,以wasserstein距離作為度量指標進行圖像配準。
8、s6,針對每一個靜止衛星通道構建swin?transformer模型,其中輸入為靜止衛星光譜通道數據、衛星天頂角、衛星方位角、太陽天頂角、太陽方位角、經緯度、高程、地表類型,標簽為對應的極軌衛星光譜通道數據。
9、s7,針對每一個預訓練模型,構建遷移學習模型使swin?transformer模型能夠泛化到所有區域,最終形成智能降尺度模型。
10、s8,針對靜止衛星的每一個通道,以高時間分辨率的靜止衛星光譜通道數據、經緯度數據、高程數據和地表類型數據作為輸入,通過步驟s6中訓練好的swin?transformer模型進行降尺度,得到高時空分辨率的光譜通道數據,結合步驟s7中訓練好的智能降尺度模型形成覆蓋靜止衛星掃描全域的高時空分辨率多光譜通道數據。
11、進一步地,步驟s1中的靜止衛星數據為靜止衛星成像儀的一級數據產品,包括傳感器各通道的光譜信息數據和地理信息數據;極軌衛星數據為極軌衛星成像儀的一級數據產品,包括傳感器各通道的光譜信息數據和地理信息數據。
12、進一步地,步驟s2中的數據校準與糾正具體為:
13、對一級數據產品進行輻射校正,將衛星傳感器原始數字信號轉換為輻亮度;根據輻亮度和大氣條件,將可見光到近紅外波段0.2-4μm的通道數據根據公式(1)轉換為表觀反射率,將熱紅外波段4-14μm波段通道數據根據公式(2)轉換為亮溫:
14、????????????????????(1);
15、其中,是表觀反射率,是衛星觀測到的輻亮度,是地球和太陽之間的距離,是太陽輻照度,是太陽天頂角;
16、???????????????????(2);
17、?????????????????????(3);
18、??????????????????????(4);
19、其中,是亮溫,是衛星觀測到的輻亮度,是波長,是普朗克常數,取6.626×10-34?js,是光速,取3×108?m/s,是波爾茲曼常數,取1.38×10-23?j/k,為普朗克第一常數,為普朗克第二常數。
20、進一步地,步驟s3中根據傳感器的光譜響應函數利用光譜角度判斷通道數據的相似程度,計算方法如下:
21、???????????????(5);
22、其中,是光譜角度,單位為弧度,是靜止衛星的光譜向量,是極軌衛星的光譜向量,是兩個向量的點積,是向量的模,即,?是向量的模,即,設光譜角度閾值為0.2弧度,若,認為兩個光譜相似,根據步驟s4時空匹配后執行步驟s6;若,認為兩個光譜不相似,在進行步驟s4的時空匹配之后,執行步驟s5以最小化兩個傳感器光譜圖像的概率分布。
23、進一步地,步驟s4具體包括如下步驟:
24、s4.1,靜止衛星使用綜合全球觀測系統規范定義的靜止軌道標稱投影,地理位置用不同的行列號表示,將行列號轉換為經緯度的方法如下:
25、???????????????????(6);
26、???????????????????(7);
27、(8);
28、??????????????????(9);
29、??????????(10);
30、??????????????(11);
31、????????????????????(12);
32、????????????????????(13);
33、??????????????(14);
34、????????????(15);
35、其中,為靜止衛星數據標稱網格行號,為靜止衛星數據標稱網格列號,和分別為圖像網格坐標轉換到投影坐標的結果;為從衛星到地球表面點的距離;為用于計算地球表面點的中間變量;、和為地球中心坐標系中的笛卡爾坐標分量,為沿赤道方向的分量,為沿經度方向的分量,為垂直方向的分量;為平面上由和構成的向量的模;為地理經度,為地理緯度;為地球的長半軸,取值6378.137千米;為地球的短半軸,取值6356.7523千米;為地心到衛星質心的距離,取值42164千米;為衛星星下點所在經度,取值104.7;和分別為列偏移和行偏移;和分別為列比例因子和行比例因子。
36、s4.2,利用雙線性插值法將靜止衛星多光譜通道數據及對應的角度數據、極軌衛星多光譜通道數據、經緯度數據、地表高程數據、地表類型數據統一至1km×1km的經緯度網格,計算公式如下:
37、???(16);
38、其中,為像素點坐標對應的衛星觀測值,為像素點坐標對應的衛星觀測值,和為參數,,,表示向下取整,表示向下取整,和是鄰近的整數像素坐標。
39、進一步地,步驟s5中對不相似的靜止衛星與極軌衛星光譜通道對圖像進行如下配準處理:
40、s5.1,對圖像進行標準化處理,以消除不同數據范圍的影響,計算公式如下:
41、????????????????(17);
42、??????????????????(18);
43、??????????????(19);
44、其中,是原始圖像的像素值,是標準化后的像素值,是圖像中像素的總數,是第個像素的值。
45、s5.2,?將圖像轉換為直方圖表示,并歸一化為概率分布:
46、?????????????(20);
47、其中,是像素值為的概率分布,是像素總數,是第個像素值,是diracdelta函數。
48、進一步地,步驟s5中對于判斷為不相似的光譜通道對圖像進行如下處理:
49、s5.3,計算wasserstein距離:
50、???????(21);
51、其中,和是兩個概率分布,是所有可能的聯合分布的集合,為下確界,表示在所有可能的聯合分布中,尋找能夠使得期望值達到最小值的那個對應的最小期望值,是和之間的距離。
52、計算wasserstein距離的離散形式:
53、???????????????(22);
54、其中,是聯合分布矩陣,是代價矩陣。
55、s5.4,定義損失函數,表示兩幅圖像之間的wasserstein距離:
56、?????????????????(23);
57、其中,和是變換后圖像和目標圖像的概率分布。
58、s5.5,使用優化算法最小化損失函數:
59、?????????????????(24);
60、其中,是優化參數,是使損失函數最小化的最優參數,為取最小值。
61、s5.6,使用優化后的參數對極軌衛星圖像進行變換,得到與靜止衛星圖像匹配的圖像。
62、進一步地,步驟s6具體包括如下步驟:
63、s6.1,設計swin?transformer模型包括:依次連接的輸入層、卷積層、swintransformer模塊、上采樣模塊和輸出層,其中輸入層即將靜止衛星光譜通道數據、衛星天頂角、衛星方位角、太陽天頂角、太陽方位角、經緯度、高程、地表類型作為輸入。
64、s6.2,將多種損失函數組合成混合損失函數,以同時考慮不同方面的優化目標:
65、????????(25);
66、其中,、、是各個損失項的權重,為均方誤差損失,為感知損失,為對抗損失,各損失表達式如下:
67、?????????????(26);
68、?????????(27);
69、???????????????(28);
70、其中,是模型預測的像素值,是對應的真實像素值,是像素總數,表示通過預訓練的卷積神經網絡提取的第層特征圖,是對應層的權重,是判別器對生成圖像的判別概率,是對數函數。
71、s6.3,利用結構相似性指數ssim評估模型性能,對于兩幅圖像和,的計算公式為:
72、???????(29)。
73、其中,和分別為圖像和的平均亮度,和分別為圖像和的亮度方差,是和之間的協方差,和是用于穩定性的小常數,避免分母為零,通常定義為:
74、???????????????(30);
75、???????????????(31);
76、其中,是像素值的動態范圍,由于已對涉及的所有數據進行了歸一化處理,因此取1,和是常量,通常取和。
77、進一步地,步驟s7具體包括如下步驟:
78、s7.1,獲取有標簽的源領域數據,即匹配好的靜止衛星和極軌衛星數據對和無標簽的目標領域數據,使用卷積神經網絡對源領域和目標領域數據進行特征提取,并對特征進行歸一化和標準化。
79、s7.2,使用領域對抗神經網絡設計損失函數,通過訓練一個領域分類器來最小化源領域和目標領域特征的差異,領域分類器的損失函數為:
80、????(32);
81、其中,是領域分類器的預測概率,是真實領域標簽,是樣本數。
82、s7.3,使用領域對抗神經網絡訓練模型,使得特征提取網絡能夠提取對源領域和目標領域都具有一致性的特征,源領域樣本的標簽預測誤差使用交叉熵損失計算,公式如下:
83、?????????(33);
84、其中,是標簽分類器對類別的預測概率,是真實標簽。
85、總損失函數為:
86、??????????????(34);
87、其中,是領域對抗損失的權重超參數。
88、本發明具有如下有益效果:
89、本發明通過將極軌衛星的一級數據產品作為標簽,構建基于深度學習的靜止衛星多光譜通道數據降尺度算法,實現靜止-極軌衛星多光譜通道數據的時空融合,該方法具有以下明顯的優勢:
90、(1)自動特征提取:深度學習模型能夠自動從原始數據中學習到高層次的特征表示,相比于依賴手工設計的傳統特征提取技術減少了人為干預,并能夠更好地捕捉到數據中的復雜時空模式。
91、(2)多尺度信息處理:深度學習模型,尤其是像swin?transformer這樣基于分層結構的模型,能夠處理和融合來自不同時空尺度的信息,這對于通過不同傳感器獲取的時空分辨率存在差異的多源衛星數據尤為重要。
92、(3)大規模數據的高效處理能力:衛星遙感數據通常規模龐大,深度學習算法基于gpu的分布式訓練,能夠高效處理和訓練大規模高分辨率數據集。
93、靈活性和可擴展性:深度學習可以通過增加網絡層數、改變網絡架構、結合不同的學習策略(如遷移學習、無監督學習等)適應不同的數據特征和任務要求,具有較好的靈活行和可擴展性。
- 還沒有人留言評論。精彩留言會獲得點贊!