一種用于鋼筋智能檢測與綁扎的單層鋼筋分割方法及系統
本技術涉及圖像處理,特別涉及一種用于鋼筋智能檢測與綁扎的單層鋼筋分割方法及系統。
背景技術:
1、鋼筋工程作為鋼筋混凝土結構工程施工過程中的關鍵性工序,其施工質量與結構的承載能力和穩定性息息相關。本領域中通常由經驗豐富的施工員通過卷尺手動測量或目視檢查每一層鋼筋網的位置信息,進而基于人工測量的位置信息,但是上述檢測方式較為繁瑣、耗時長且容易出現檢測錯誤。相關技術中,存在使用相機采集鋼筋圖像,利用計算機視覺技術識別圖像進行鋼筋檢測和鋼筋綁扎,但是對于多層鋼筋結構,在圖像上不同層鋼筋網之間難以區分,影響鋼筋檢測與綁扎的效率和精度。
2、因此,如何提高檢測鋼筋交叉點的效率和精度是本領域技術人員目前需要解決的技術問題。
技術實現思路
1、本技術的目的是提供一種用于鋼筋智能檢測與綁扎的單層鋼筋分割方法及系統,能夠提高檢測鋼筋交叉點的效率和精度。
2、為解決上述技術問題,本技術提供一種用于鋼筋智能檢測與綁扎的單層鋼筋分割方法,包括:
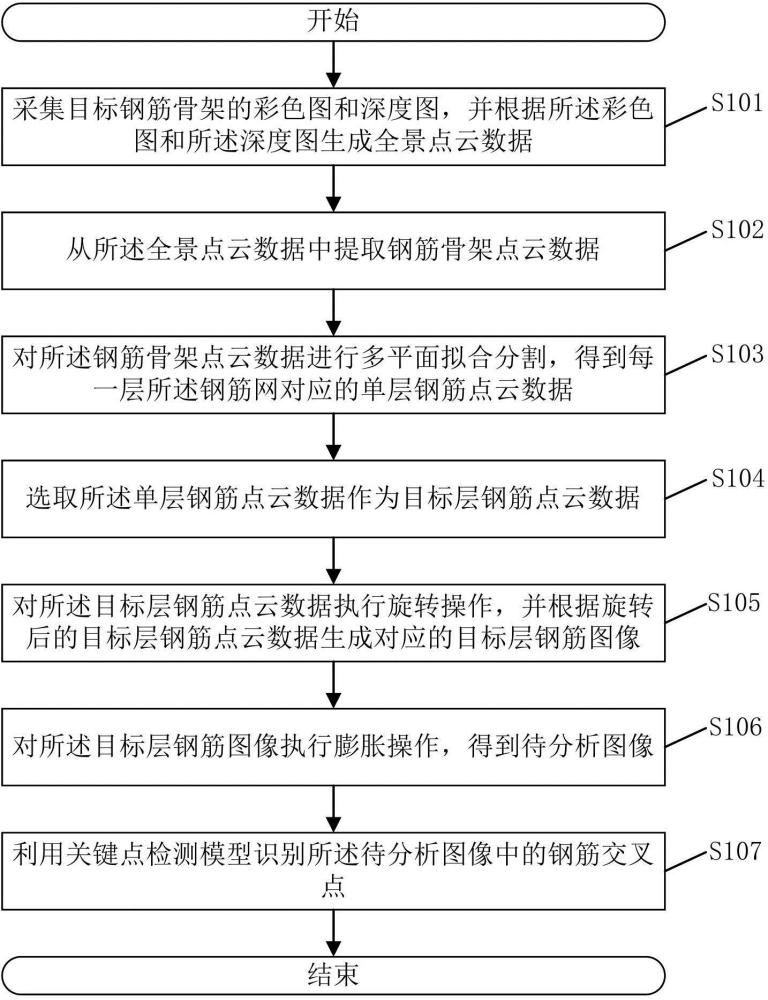
3、采集目標鋼筋骨架的彩色圖和深度圖,并根據所述彩色圖和所述深度圖生成全景點云數據;其中,所述目標鋼筋骨架包括多層鋼筋網;
4、從所述全景點云數據中提取鋼筋骨架點云數據;
5、對所述鋼筋骨架點云數據進行多平面擬合分割,得到每一層所述鋼筋網對應的單層鋼筋點云數據;
6、選取所述單層鋼筋點云數據作為目標層鋼筋點云數據;
7、對所述目標層鋼筋點云數據執行旋轉操作,并根據旋轉后的目標層鋼筋點云數據生成對應的目標層鋼筋圖像;
8、對所述目標層鋼筋圖像執行膨脹操作,得到待分析圖像;
9、利用關鍵點檢測模型識別所述待分析圖像中的鋼筋交叉點。
10、可選的,在利用關鍵點檢測模型識別所述待分析圖像中的鋼筋交叉點之后,還包括:
11、根據所述鋼筋交叉點的位置信息執行鋼筋綁扎操作。
12、可選的,在利用關鍵點檢測模型識別所述待分析圖像中的鋼筋交叉點之后,還包括:
13、根據所述鋼筋交叉點的位置信息確定鋼筋間距。
14、可選的,對所述目標層鋼筋點云數據執行旋轉操作,包括:
15、從所述目標層鋼筋點云數據中確定多個鋼筋點云直線;
16、計算每一所述鋼筋點云直線與水平面的夾角,并確定夾角最小值;
17、控制所述目標層鋼筋點云數據按照所述夾角最小值執行旋轉操作,以使目標鋼筋點云直線與水平面平行;其中,所述目標鋼筋點云直線為所述夾角最小值對應的鋼筋點云直線。
18、可選的,在利用關鍵點檢測模型識別所述待分析圖像中的鋼筋交叉點之前,還包括:
19、獲取多個樣本圖像;其中,所述樣本圖像中為單層鋼筋網的圖像;
20、對所有所述樣本圖像的每一鋼筋交叉區域添加邊界框和鋼筋交叉點;其中,所述邊界框對應的區域包含所述鋼筋交叉區域,所述鋼筋交叉點所在的位置為所述鋼筋交叉區域的中心;
21、利用所述樣本圖像對深度學習模型進行訓練,得到所述關鍵點檢測模型。
22、可選的,根據所述鋼筋交叉點的位置信息確定鋼筋間距,包括:
23、確定所述鋼筋交叉點在所述待分析圖像中的像素坐標;
24、根據相機內參對所述像素坐標進行坐標系轉換,得到所述鋼筋交叉點在相機坐標系下的空間坐標;
25、根據相鄰的所述鋼筋交叉點的空間坐標計算所述鋼筋間距。
26、可選的,根據相鄰的所述鋼筋交叉點的空間坐標計算所述鋼筋間距,包括:
27、步驟1;將迭代次數i設置為1;
28、步驟2:選取所述待分析圖像中的第i個鋼筋交叉點;
29、步驟3:根據第i個鋼筋交叉點與右側相鄰鋼筋交叉點的空間坐標計算交叉點間距,根據第i個鋼筋交叉點與下方相鄰鋼筋交叉點的空間坐標計算交叉點間距;
30、步驟4;判斷所述待分析圖像中的鋼筋交叉點是否選取完畢;若是,則進入步驟5;若否,則將迭代次數i的數值加1,并進入步驟1;
31、步驟5:根據所有交叉點間距確定相鄰兩根鋼筋之間的距離。
32、可選的,在根據所述鋼筋交叉點的位置信息確定鋼筋間距之后,還包括:
33、判斷相鄰兩根鋼筋之間的距離是否在預設區間內;
34、若否,則判定所述目標鋼筋骨架的成型質量不符合要求。
35、可選的,從所述全景點云數據中提取鋼筋骨架點云數據,包括:
36、利用直通濾波器對所述全景點云數據進行過濾和降噪,得到所述鋼筋骨架點云數據。
37、本技術還提供了一種用于鋼筋智能檢測與綁扎的單層鋼筋分割系統,該系統包括:
38、點云生成模塊,用于采集目標鋼筋骨架的彩色圖和深度圖,并根據所述彩色圖和所述深度圖生成全景點云數據;其中,所述目標鋼筋骨架包括多層鋼筋網;
39、點云提取模塊,用于從所述全景點云數據中提取鋼筋骨架點云數據;
40、點云分割模塊,用于對所述鋼筋骨架點云數據進行多平面擬合分割,得到每一層所述鋼筋網對應的單層鋼筋點云數據;
41、交叉點識別模塊,用于選取所述單層鋼筋點云數據作為目標層鋼筋點云數據;所述交叉點識別模塊,還用于對所述目標層鋼筋點云數據執行旋轉操作,并根據旋轉后的目標層鋼筋點云數據生成對應的目標層鋼筋圖像;所述交叉點識別模塊,還用于對所述目標層鋼筋圖像執行膨脹操作,得到待分析圖像;所述交叉點識別模塊,還用于利用關鍵點檢測模型識別所述待分析圖像中的鋼筋交叉點。
42、本技術提供了一種用于鋼筋智能檢測與綁扎的單層鋼筋分割方法,包括:采集目標鋼筋骨架的彩色圖和深度圖,并根據所述彩色圖和所述深度圖生成全景點云數據;其中,所述目標鋼筋骨架包括多層鋼筋網;從所述全景點云數據中提取鋼筋骨架點云數據;對所述鋼筋骨架點云數據進行多平面擬合分割,得到每一層所述鋼筋網對應的單層鋼筋點云數據;選取所述單層鋼筋點云數據作為目標層鋼筋點云數據;對所述目標層鋼筋點云數據執行旋轉操作,并根據旋轉后的目標層鋼筋點云數據生成對應的目標層鋼筋圖像;對所述目標層鋼筋圖像執行膨脹操作,得到待分析圖像;利用關鍵點檢測模型識別所述待分析圖像中的鋼筋交叉點。
43、本技術獲取目標鋼筋骨架的彩色圖和深度圖,并基于彩色圖和深度圖中包含的信息生成全景點云數據,以便從全景點云數據中提取目標鋼筋骨架對應的鋼筋骨架點云數據。由于目標鋼筋骨架包括多層鋼筋網,本技術對鋼筋骨架點云數據進行多平面擬合分割,得到每一層所述鋼筋網對應的單層鋼筋點云數據;通過上述方式可以將不同層的鋼筋網區分開來,以便基于單層鋼筋點云數據進行鋼筋智能檢測與綁扎。本技術還將單層鋼筋點云數據作為目標層鋼筋點云數據進行旋轉操作,并將旋轉后的目標層鋼筋點云數據轉換為對應的目標層鋼筋圖像;本技術還對目標層鋼筋圖像執行膨脹操作得到待分析圖像,并利用關鍵點檢測模型識別待分析圖像中的鋼筋交叉點,以便減少由于噪聲或圖像模糊導致的誤檢。本技術的實現過程無需人工參與,且避免了不同層鋼筋網之間的干擾,故本技術能夠提高檢測鋼筋交叉點的效率和精度。本技術同時還提供了一種用于鋼筋智能檢測與綁扎的單層鋼筋分割系統,具有上述有益效果,在此不再贅述。
- 還沒有人留言評論。精彩留言會獲得點贊!