基于軌跡的車道路網增量生成方法、裝置、設備及介質
本技術涉及智能交通信息,尤其涉及一種基于軌跡的車道路網增量生成方法、裝置、電子設備及存儲介質。
背景技術:
1、高精地圖因自動駕駛技術需求而誕生,作為自動駕駛汽車先驗的知識庫與空間基準,其提供了高精度、高豐富度、高動態性與高可靠性的數據服務。然而,國內公路里程長,更新頻繁,依賴高度集成但數量有限的移動測量系統難以實現高精地圖對上述道路的全覆蓋與高頻更新,制約了其在自動駕駛領域的全面落地與應用。眾包為高精地圖構建提供了一種通過群智感知解決上述問題的新模式。眾包模式基于城市交通系統中無處不在的移動感知終端,不依賴專業的移動測量系統,具有成本低、空間覆蓋廣、更新及時等特點。
2、車載軌跡數據從空間位置、時間、移動模式等維度記錄了車輛與城市交通路網的交互活動。車輛作為一種與城市交通系統交互最頻繁的“傳感器”,形成的軌跡數據覆蓋面廣、重訪率高且具有時效性,同時高頻、高精的定位技術為基于眾包軌跡提取車道級路網信息提供了數據支持。對于實時、海量軌跡數據的分析與挖掘任務,分布式處理、流式計算、大數據分析、深度學習等提供了技術支撐。
3、現有基于眾包軌跡數據的車道級路網提取方法可以分為兩種,一種是基于?概率分布方法從大量軌跡樣本中提取車道中心點再擬合為車道中心線,此種計算開銷大且依賴于大量樣本數據,另一種是基于聚類方法適用于車道幾何信息的提取與更新,對數據樣本采樣頻率與精度要求較高,這兩種方法提取的路網連接關系不夠準確,也無法滿足地圖及時更新的要求。
技術實現思路
1、本技術實施例提供一種基于軌跡的車道路網增量生成方法、裝置、電子設備及存儲介質,能夠提高路網增量生成的精確度。
2、本技術實施例提供了一種基于軌跡的車道路網增量生成方法,包括:
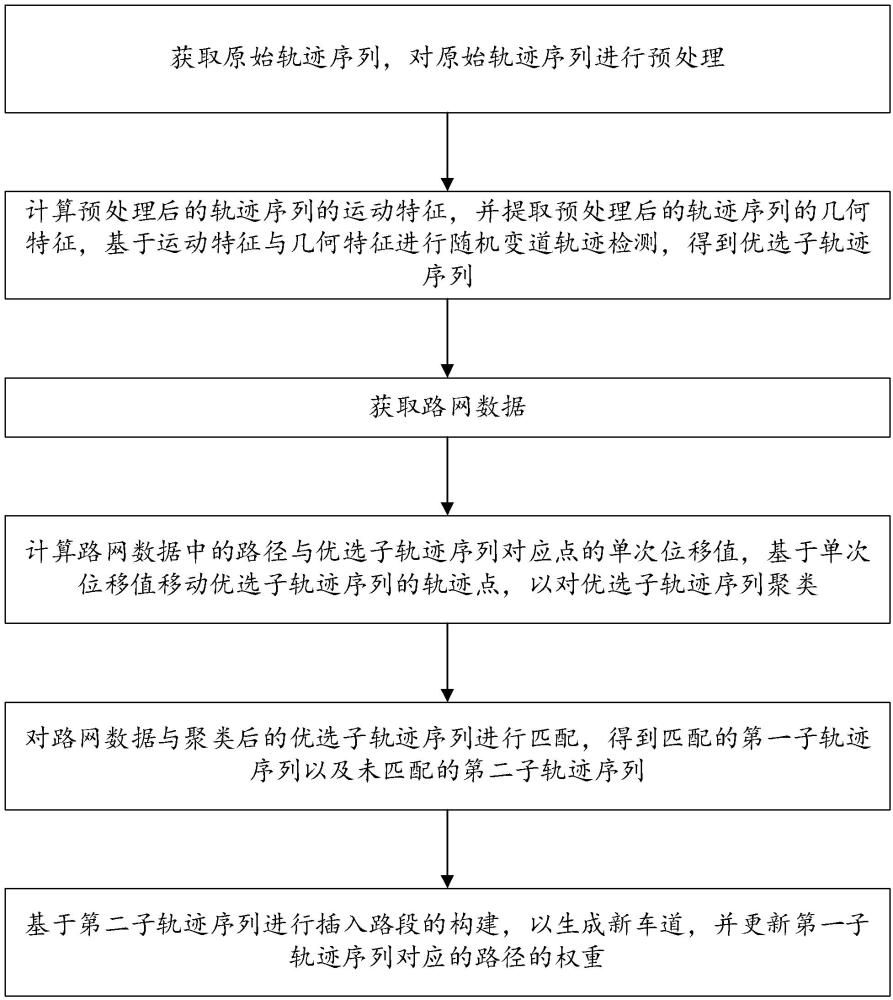
3、獲取原始軌跡序列,對所述原始軌跡序列進行預處理;
4、計算所述預處理后的軌跡序列的運動特征,并提取所述預處理后的軌跡序列的幾何特征,基于所述運動特征與所述幾何特征進行隨機變道軌跡檢測,得到優選子軌跡序列;
5、獲取路網數據;
6、計算所述路網數據中的路徑與所述優選子軌跡序列對應點的單次位移值,基于所述單次位移值移動所述優選子軌跡序列的軌跡點,以對所述優選子軌跡序列聚類;
7、對所述路網數據與聚類后的所述優選子軌跡序列進行匹配,得到匹配的第一子軌跡序列以及未匹配的第二子軌跡序列;
8、基于所述第二子軌跡序列進行插入路段的構建,以生成新車道,并更新所述第一子軌跡序列對應的路徑的權重。
9、進一步地,上述基于軌跡的車道路網增量生成方法,其中,所述對所述原始軌跡序列進行預處理,包括:對所述原始軌跡序列進行軌跡清洗;
10、對所述原始軌跡序列進行軌跡清洗包括:
11、獲取原始軌跡序列對應的方向角序列;
12、根據所述原始軌跡序列計算對應的航向角序列,基于所述方向角序列與所述航向角序列計算角度差值,將所述角度差值超過預設的角度閾值的軌跡序列剔除;
13、根據所述原始軌跡序列計算對應的速度序列,將速度超過預設的速度閾值的軌跡序列剔除。
14、進一步地,上述基于軌跡的車道路網增量生成方法,其中,所述幾何特征包括道路形狀描述子,計算所述預處理后的軌跡序列的幾何特征,包括:
15、找到每段軌跡序列的軌跡中心點;
16、在以軌跡中心點為圓心,以r為半徑的范圍內遍歷軌跡點,并計算相對角度與距離;
17、將所述距離按照預設角度與預設長度r/3進行分區,形成若干個分區區間;
18、計算落入各個所述分區區間的軌跡點的數量,基于所述數量對所述分區區間進行編碼,以得到道路形狀描述子。
19、進一步地,上述基于軌跡的車道路網增量生成方法,其中,所述運動特征至少包括累計航向角變化量、起點-終點航向角變化量與角速度變化量,所述幾何特征至少包括道路形狀描述子、軌跡序列兩端到道路邊界的距離與軌跡序列相對道路中心線的橫向位移;
20、計算所述預處理后的軌跡序列的運動特征,并提取所述預處理后的軌跡序列的幾何特征,基于所述運動特征與所述幾何特征進行變道軌跡檢測,得到優選子軌跡序列,包括:
21、將所述累計航向角變化量、所述起點-終點航向角變化量、所述角速度變化量,所述道路形狀描述子、所述軌跡序列兩端到道路邊界的距離以及所述軌跡序列相對道路中心線的橫向位移輸入到向量機中進行二分類,剔除隨機變道軌跡,得到優選子軌跡序列。
22、進一步地,上述基于軌跡的車道路網增量生成方法,其中,計算所述路網數據中的路徑與所述優選子軌跡序列對應點的單次位移值,基于所述單次位移值移動所述優選子軌跡序列的軌跡點,以對所述優選子軌跡序列聚類,包括:
23、計算優選子軌跡序列中的軌跡點、所述軌跡點的周圍區域內的軌跡點相對于所述對應的路網數據中的路徑中對應點的位移差值與方向差值;
24、基于所述位移差值與所述方向差值計算單次位移值;
25、根據所述單次位移值移動所述優選子軌跡序列中所有的軌跡點,以對所述優選子軌跡序列聚類。
26、進一步地,上述基于軌跡的車道路網增量生成方法,其中,所述對所述路網數據與聚類后的所述優選子軌跡序列進行匹配,得到匹配的第一子軌跡序列以及未匹配的第二子軌跡序列,包括:
27、構建隱馬爾科夫模型,遍歷聚類后的優選子軌跡序列,將軌跡點視為觀測值,真實位置或真實路段視為隱狀態;
28、通過下式計算聚類后的所述優選子軌跡序列中的軌跡點到所述路網數據中的路徑的觀測轉移概率:
29、
30、其中,為軌跡點到路徑上的投影距離,為觀測誤差,exp為指數函數,表示軌跡點到路徑上的投影點;
31、通過下式計算所述路網數據中的路徑間的轉移概率:
32、
33、其中,
34、其中,是帶深度的有向圖廣度優先搜索算法,代表搜索路網節點的深度;
35、求解最優序列:
36、初始化:
37、遞推得到:
38、
39、其中,,為觀測序列長度,s為觀測對象,代表前個最終狀態為的觀測結果最有可能對應的狀態序列的概率,為第一個節點的觀測結果到匹配序列的概率矩陣,為匹配序列中各對象間的概率轉移矩陣,為前個最終狀態為的觀測結果最有可能對應的狀態序列的概率,為第t個節點的觀測結果到匹配序列的概率矩陣;
40、通過下式計算得到第一子軌跡序列{}:
41、
42、其中,為對函數求參數。
43、根據聚類后的所述優選子軌跡序列與匹配的所述第一子軌跡序列,得到未匹配的第二子軌跡序列。
44、進一步地,上述基于軌跡的車道路網增量生成方法,其中,基于所述第二子軌跡序列進行插入路段的構建,以生成新車道,并更新所述第一子軌跡序列對應的路徑的權重,包括:
45、對所述路網數據的路徑進行無向圖的帶深度的廣度優先搜索算法求解;
46、若所述求解的結果為0,則將所述第二子軌跡序列的前后端點匹配到所述路網數據的路徑上,進行插入路段的構建,以生成新車道;
47、若所述求解的結果不為0,且不滿足匹配條件時,則將所述第二子軌跡序列插入所述路網數據對應的圖結構數據中;
48、更新所述第一子軌跡序列對應的路徑的權重。
49、本技術實施例還提供了一種基于軌跡的車道路網增量生成裝置,包括:
50、第一獲取模塊,用于獲取原始軌跡序列;
51、預處理模塊,用于對所述原始軌跡序列進行預處理;
52、隨機變道軌跡檢測模塊,用于提取所述預處理后的軌跡序列的運動特征,并計算所述預處理后的軌跡序列的幾何特征,基于所述運動特征與所述幾何特征進行隨機變道軌跡檢測,得到優選子軌跡序列;
53、第二獲取模塊,用于獲取路網數據;
54、聚類模塊,用于計算所述路網數據中的路徑與所述優選子軌跡序列對應點的單次位移值,基于所述單次位移值移動所述優選子軌跡序列的軌跡點,以對所述優選子軌跡序列聚類;
55、匹配模塊,用于對所述路網數據與聚類后的所述優選子軌跡序列進行匹配,得到匹配的第一子軌跡序列以及未匹配的第二子軌跡序列;
56、車道構建與權重更新模塊,用于基于所述第二子軌跡序列進行插入路段的構建,以生成新車道,并更新所述第一子軌跡序列對應的路徑的權重。
57、本技術實施例還提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質中存儲有多條指令,所述指令適于由處理器加載以執行上述任一項基于軌跡的車道路網增量生成方法。
58、本技術實施例還提供了一種電子設備,包括處理器和存儲器,所述處理器與所述存儲器電性連接,所述存儲器用于存儲指令和數據,所述處理器用于上述任一項所述的基于軌跡的車道路網增量生成方法中的步驟。
59、本技術提供的基于軌跡的車道路網增量生成方法、裝置、電子設備及存儲介質,本技術通過隨機變道軌跡檢測提取優選子軌跡序列,對優選子軌跡序列和路網數據中的路徑進行匹配并聚類,得到未匹配的第二字軌跡序列,通過第二字軌跡序列進行插入路段的構建,實現了新車道的生成。本技術實施例增強了軌跡與路網之間的聯系,提高了路網增量生成的精確度,能夠及時更新地圖。
- 還沒有人留言評論。精彩留言會獲得點贊!