太陽能長航時無人機設計點選擇方法、系統、設備及介質與流程
本技術涉及太陽能長航時無人機領域,特別是涉及一種太陽能長航時無人機設計點選擇方法、系統、設備及介質。
背景技術:
1、太陽能長航時無人機在軍事、民用等領域有眾多的應用前景。受制于太陽光照強度和太陽能板轉化效率,為了獲得盡可能高的功率和能量,太陽能飛機需要較大的翼面積來鋪設太陽能板,并盡量提高機翼上太陽能電池的鋪設面積。而太陽能電池的面積與無人機的推力、功率等動力參數高度耦合,這使得總體設計階段的翼載荷、推重比等總體設計參數具有極高的相關性,即通過功率約束可將翼載荷與推重比相聯系得到約束方程,用于判斷設計點選擇是否合理。
2、目前一些太陽能無人機設計方法基于重量-能量平衡的角度,從長航時任務的要求出發進行總體參數設計。但對于太陽能無人機,尤其是小型無人機來說,受突風等環境因素影響較大,需要時刻調整油門改變推力以實現飛行姿態穩定,這對太陽能無人機推重比提出了一定的要求。在沒有儲能裝置提供額外動力的情況下,需要依靠太陽能電池的自身功率滿足推力要求,而這又與太陽能無人機翼面積相關。因此,研究太陽能無人機的功率約束對翼載荷、推重比等設計點的影響十分有必要。
技術實現思路
1、本技術的目的是提供一種太陽能長航時無人機設計點選擇方法、系統、設備及介質,可提高太陽能長航時無人機設計點選擇的準確性,進而提高太陽能長航時無人機的機動性。
2、為實現上述目的,本技術提供了如下方案:
3、第一方面,本技術提供了一種太陽能長航時無人機設計點選擇方法,包括:
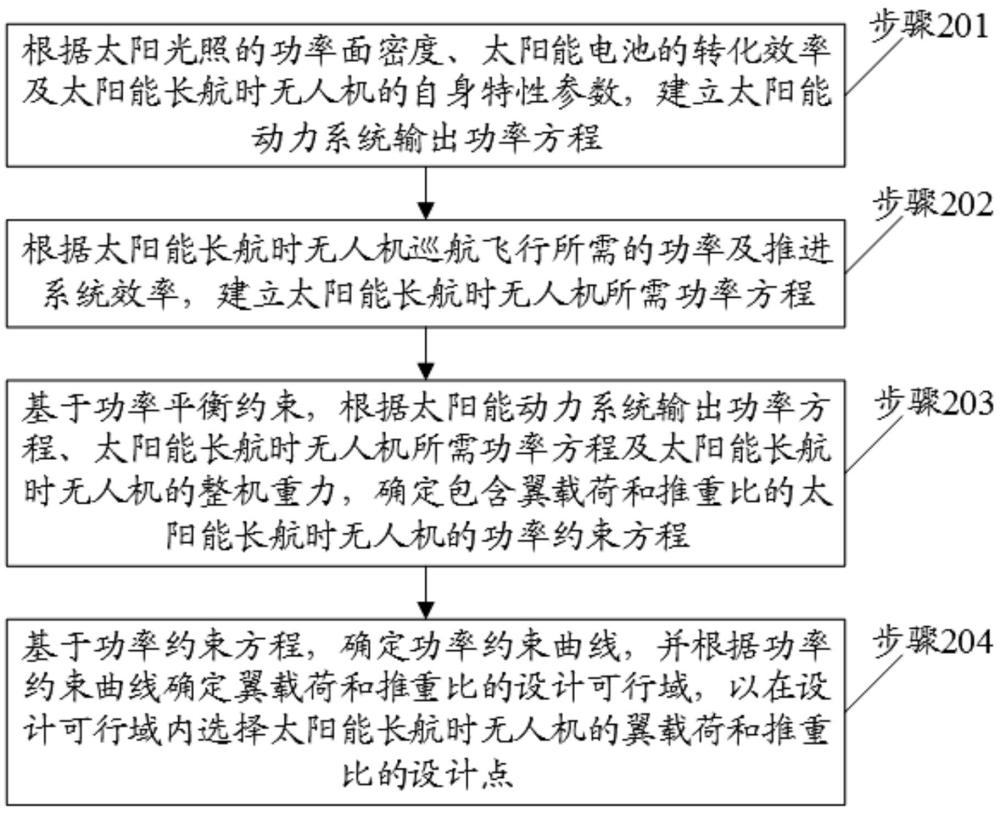
4、根據太陽光照的功率面密度、太陽能電池的轉化效率及太陽能長航時無人機的自身特性參數,建立太陽能動力系統輸出功率方程;
5、根據太陽能長航時無人機巡航飛行所需的功率及推進系統效率,建立太陽能長航時無人機所需功率方程;
6、基于功率平衡約束,根據所述太陽能動力系統輸出功率方程、所述太陽能長航時無人機所需功率方程及太陽能長航時無人機的整機重力,確定包含翼載荷和推重比的太陽能長航時無人機的功率約束方程;
7、基于所述功率約束方程,確定功率約束曲線,并根據所述功率約束曲線確定翼載荷和推重比的設計可行域,以在所述設計可行域內選擇太陽能長航時無人機的翼載荷和推重比的設計點。
8、可選地,所述太陽能長航時無人機的自身特性參數包括太陽能電池鋪設率及功率修正系數;
9、所述太陽能動力系統輸出功率方程為:
10、;
11、其中,為太陽光照的功率面密度,為太陽能電池的轉化效率,為太陽能電池的輸出功率大小,為太陽能長航時無人機的太陽能電池鋪設率,為太陽能長航時無人機的功率修正系數,為太陽能長航時無人機的翼面積,為太陽能長航時無人機所搭載的太陽能動力系統的實際輸出電功率。
12、可選地,所述太陽能長航時無人機所需功率方程為:
13、;
14、其中,為太陽能長航時無人機飛行過程中任一時刻的總功率,為太陽能長航時無人機巡航飛行所需的功率,, f為太陽能長航時無人機的推力大小, v為太陽能長航時無人機的飛行速度,為推進系統效率。
15、可選地,所述功率平衡約束為:
16、;
17、其中,為太陽能長航時無人機飛行過程中任一時刻的總功率,為太陽能長航時無人機所搭載的太陽能動力系統的實際輸出電功率。
18、可選地,基于功率平衡約束,根據所述太陽能動力系統輸出功率方程、所述太陽能長航時無人機所需功率方程及太陽能長航時無人機的整機重力,確定包含翼載荷和推重比的太陽能長航時無人機的功率約束方程,具體包括:
19、基于功率平衡約束,聯立所述太陽能動力系統輸出功率方程及所述太陽能長航時無人機所需功率方程,得到初步功率約束方程;
20、根據所述初步功率約束方程及太陽能長航時無人機的整機重力,確定包含翼載荷和推重比的太陽能長航時無人機的功率約束方程。
21、可選地,所述初步功率約束方程為:
22、;
23、其中, f為太陽能長航時無人機的推力大小,為推進系統效率, v為太陽能長航時無人機的飛行速度,為太陽能電池的轉化效率,為太陽光照的功率面密度,為太陽能長航時無人機的太陽能電池鋪設率,為太陽能長航時無人機的功率修正系數,為太陽能長航時無人機的翼面積。
24、可選地,所述功率約束方程為:
25、;
26、其中,為推重比,為翼載荷,為太陽能長航時無人機的整機重力,為太陽能長航時無人機的質量,為太陽能長航時無人機的重力加速度。
27、第二方面,本技術提供了一種太陽能長航時無人機設計點選擇系統,包括:
28、太陽能功率方程構建模塊,用于根據太陽光照的功率面密度、太陽能電池的轉化效率及太陽能長航時無人機的自身特性參數,建立太陽能動力系統輸出功率方程;
29、無人機功率方程構建模塊,用于根據太陽能長航時無人機巡航飛行所需的功率及推進系統效率,建立太陽能長航時無人機所需功率方程;
30、功率約束方程確定模塊,分別與所述太陽能功率方程構建模塊及所述無人機功率方程構建模塊連接,用于基于功率平衡約束,根據所述太陽能動力系統輸出功率方程、所述太陽能長航時無人機所需功率方程及太陽能長航時無人機的整機重力,確定包含翼載荷和推重比的太陽能長航時無人機的功率約束方程;
31、設計點選擇模塊,與所述功率約束方程確定模塊連接,用于基于所述功率約束方程,確定功率約束曲線,并根據所述功率約束曲線確定翼載荷和推重比的設計可行域,以在所述設計可行域中選擇太陽能長航時無人機的翼載荷和推重比的設計點。
32、第三方面,本技術提供了一種計算機設備,包括:存儲器、處理器以及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述計算機程序以實現上述的太陽能長航時無人機設計點選擇方法。
33、第四方面,本技術提供了一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現上述的太陽能長航時無人機設計點選擇方法。
34、根據本技術提供的具體實施例,本技術公開了以下技術效果:
35、本技術提供了一種太陽能長航時無人機設計點選擇方法、系統、設備及介質,充分考慮了太陽能長航時無人機的所需功率和推進系統效率與太陽能電池鋪設面積的高度耦合特性,在功率平衡約束下,由太陽能動力系統輸出功率方程與太陽能長航時無人機所需功率方程得到包含翼載荷和推重比的太陽能長航時無人機的功率約束方程,進一步推導得到功率約束曲線,進而可以確定設計可行域,在設計可行域內選擇太陽能長航時無人機的翼載荷和推重比的設計點,提高了設計點選擇的準確性,確保太陽能長航時無人機飛行過程中太陽能電池所提供的功率滿足推重比要求,以保證無人機具備一定的機動性。
- 還沒有人留言評論。精彩留言會獲得點贊!