一種集裝箱堆高機實時故障監測與預警系統的制作方法
本技術涉及數據處理相關領域,尤其涉及一種集裝箱堆高機實時故障監測與預警系統。
背景技術:
1、集裝箱堆高機是港口、碼頭和物流中心等大型物流設施中不可或缺的裝卸設備,主要用于堆疊、搬運和移動集裝箱。隨著物流行業的快速發展,集裝箱堆高機的使用頻率和負載量不斷增加,使得其運行的安全性和可靠性變得尤為重要。傳統的集裝箱堆高機維護和故障排查主要依賴于人工巡檢和定期維修,這種方法不僅效率低下,而且難以及時發現潛在故障,可能導致設備停機、生產延誤甚至安全事故。
2、現階段相關技術中,集裝箱堆高機故障監測由于局限于對特定部件或系統的監測,缺乏全面的監測范圍和數據支持導致存在無法準確判斷故障的類型、位置和嚴重程度,導致預警信息的誤報或漏報,影響設備的正常運行和維護工作的技術問題。
技術實現思路
1、本技術通過提供一種集裝箱堆高機實時故障監測與預警系統,采用對集裝箱堆高機進行數據的實時采集和分析,及時發現潛在的故障或異常情況,利用算法對潛在的故障或異常情況進行處理和分析,識別出故障模式或異常情況等技術手段,達到了實現實時的故障監測和預警,降低誤報率和漏報率,確保設備在出現故障時得到及時處理,避免設備停機或生產延誤,提高設備運行的可靠性和安全性的技術效果。
2、本技術提供一種集裝箱堆高機實時故障監測方法,包括:
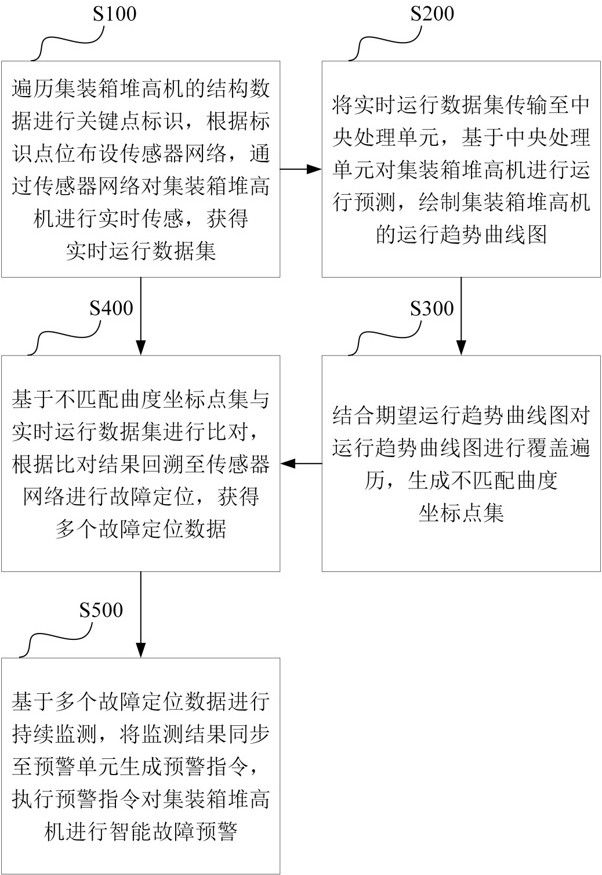
3、遍歷集裝箱堆高機的結構數據進行關鍵點標識,根據標識點位布設傳感器網絡,通過所述傳感器網絡對集裝箱堆高機進行實時傳感,獲得實時運行數據集,所述實時運行數據集與所述傳感器網絡存在對應關系;將所述實時運行數據集傳輸至中央處理單元,基于所述中央處理單元對集裝箱堆高機進行運行預測,繪制集裝箱堆高機的運行趨勢曲線圖;結合期望運行趨勢曲線圖對所述運行趨勢曲線圖進行覆蓋遍歷,生成不匹配曲度坐標點集;基于所述不匹配曲度坐標點集與所述實時運行數據集進行比對,根據比對結果回溯至所述傳感器網絡進行故障定位,獲得多個故障定位數據;基于所述多個故障定位數據進行持續監測,將監測結果同步至預警單元生成預警指令,執行所述預警指令對集裝箱堆高機進行智能故障預警。
4、在可能的實現方式中,遍歷集裝箱堆高機的結構數據進行關鍵點標識,根據標識點位布設傳感器網絡,通過所述傳感器網絡對集裝箱堆高機進行實時傳感,獲得實時運行數據集,執行以下處理:
5、獲取集裝箱堆高機上標識點位的監測需求信息;結合所述監測需求信息確定傳感器信息集,所述傳感器信息集包含傳感器類型信息、傳感器數量信息;基于所述標識點位按照所述傳感器類型信息、所述傳感器數量信息進行多個傳感器的布設,配置所述傳感器網絡,所述傳感器網絡包含多個傳感器的采樣頻率;通過所述傳感器網絡對集裝箱堆高機按照所述采樣頻率進行數據傳感,確定所述實時運行數據集。
6、在可能的實現方式中,將所述實時運行數據集傳輸至中央處理單元,基于所述中央處理單元對集裝箱堆高機進行運行預測,繪制集裝箱堆高機的運行趨勢曲線圖,執行以下處理:
7、基于所述實時運行數據集進行特征提取,獲得多個運行特征;按照所述多個運行特征對所述實時運行數據集進行數據劃分,生成訓練集、監督集、測試集;引入損失函數,使用所述訓練集、所述監督集對運行預測模型進行訓練;基于所述測試集對所述運行預測模型進行驗證評估,根據評估結果輸出所述運行預測模型;將所述運行預測模型添加至所述中央處理單元,通過所述運行預測模型對集裝箱堆高機進行運行預測,生成運行預測數據集;將所述運行預測數據集同步至運行趨勢坐標系,繪制所述運行趨勢曲線圖。
8、在可能的實現方式中,結合期望運行趨勢曲線圖對所述運行趨勢曲線圖進行覆蓋遍歷,生成不匹配曲度坐標點集,執行以下處理:
9、調取大數據中集裝箱堆高機的歷史運行數據集,確定多個期望運行數據;基于所述多個期望運行數據生成期望運行趨勢曲線圖;設定遍歷時間步長,將所述期望運行趨勢曲線圖與所述運行趨勢曲線圖進行對齊,根據對齊結果按照所述遍歷時間步長進行覆蓋遍歷,生成遍歷曲度坐標點集,所述遍歷曲度坐標點集包含多個期望坐標點與多個實際坐標點,且所述多個期望坐標點內的每個期望坐標點均與所述多個實際坐標點內的一個實際坐標點對應;基于所述遍歷曲度坐標點集判斷第一期望坐標點與第一實際坐標點的差異值是否大于預設差異閾值;當所述第一期望坐標點與所述第一實際坐標點的差異值大于預設差異閾值時,則視為所述第一期望坐標點與所述第一實時坐標點所對應的時間點上的曲度不匹配,并將不匹配時間點、所述第一期望坐標點、所述第一實時坐標點添加至所述不匹配曲度坐標點集。
10、在可能的實現方式中,基于所述不匹配曲度坐標點集與所述實時運行數據集進行比對,執行以下處理:
11、將所述不匹配曲度坐標點集作為索引數據,與所述實時運行數據集進行匹配,根據匹配結果提取多個實時運行數據,所述多個實時運行數據與所述不匹配曲度坐標點集存在一一對應的關系;依次判斷所述多個實時運行數據的每個實時運行數據是否處于預設運行閾值區間;提取不處于所述預設運行閾值區間的實時運行數據集,并對所述實時運行數據集進行異常標簽的標識,生成異常標簽數據;將所述異常標簽數據添加至比對結果。
12、在可能的實現方式中,根據比對結果回溯至所述傳感器網絡進行故障定位,獲得多個故障定位數據,執行以下處理:
13、基于所述異常標簽數據將比對結果回溯至所述傳感器網絡,確定多個異常數據來源,所述多個異常數據來源與n個傳感器存在對應關系,n為大于等于1的整數;結合所述多個異常數據來源的異常數據對所述n個傳感器進行分析,生成傳感器異常信息集,所述傳感器異常信息集包含異常傳感器類型信息、異常傳感器位置信息;根據所述異常傳感器類型信息、所述異常傳感器位置信息劃定多個故障區域;基于所述多個故障區域進行故障點位標識,生成所述多個故障定位數據。
14、在可能的實現方式中,基于所述多個故障定位數據進行持續監測,將監測結果同步至預警單元生成預警指令,執行以下處理:
15、基于集裝箱堆高機的運行時長設定監測周期;基于所述多個故障定位數據對集裝箱堆高機按照所述監測周期進行持續監測,生成所述監測結果;解析所述監測結果獲得故障風險信息,基于所述故障風險信息設定多個級別的預警閾值;基于所述監測結果觸發所述預警單元,通過所述預警單元對所述故障風險信息與所述多個級別的預警閾值進行匹配,生成目標級別的預警信息;將所述目標級別的預警信息添加至預警指令。
16、本技術還提供了一種集裝箱堆高機實時故障預警系統,包括:
17、實時運行數據集獲取模塊,所述實時運行數據集獲取模塊用于遍歷集裝箱堆高機的結構數據進行關鍵點標識,根據標識點位布設傳感器網絡,通過所述傳感器網絡對集裝箱堆高機進行實時傳感,獲得實時運行數據集,所述實時運行數據集與所述傳感器網絡存在對應關系;運行預測模塊,所述運行預測模塊用于將所述實時運行數據集傳輸至中央處理單元,基于所述中央處理單元對集裝箱堆高機進行運行預測,繪制集裝箱堆高機的運行趨勢曲線圖;不匹配曲度坐標點集生成模塊,所述不匹配曲度坐標點集生成模塊用于結合期望運行趨勢曲線圖對所述運行趨勢曲線圖進行覆蓋遍歷,生成不匹配曲度坐標點集;故障定位模塊,所述故障定位模塊用于基于所述不匹配曲度坐標點集與所述實時運行數據集進行比對,根據比對結果回溯至所述傳感器網絡進行故障定位,獲得多個故障定位數據;智能故障預警模塊,所述智能故障預警模塊用于基于所述多個故障定位數據進行持續監測,將監測結果同步至預警單元生成預警指令,執行所述預警指令對集裝箱堆高機進行智能故障預警。
18、擬通過本技術提出的一種集裝箱堆高機實時故障監測與預警系統,首先遍歷集裝箱堆高機的結構數據進行關鍵點標識,根據標識點位布設傳感器網絡,通過傳感器網絡對集裝箱堆高機進行實時傳感,獲得實時運行數據集,實時運行數據集與傳感器網絡存在對應關系,接著將實時運行數據集傳輸至中央處理單元,基于中央處理單元對集裝箱堆高機進行運行預測,繪制集裝箱堆高機的運行趨勢曲線圖,再結合期望運行趨勢曲線圖對運行趨勢曲線圖進行覆蓋遍歷,生成不匹配曲度坐標點集,進而基于不匹配曲度坐標點集與實時運行數據集進行比對,根據比對結果回溯至傳感器網絡進行故障定位,獲得多個故障定位數據,最后基于多個故障定位數據進行持續監測,將監測結果同步至預警單元生成預警指令,執行預警指令對集裝箱堆高機進行智能故障預警,達到了實現實時的故障監測和預警,降低誤報率和漏報率,確保設備在出現故障時得到及時處理,避免設備停機或生產延誤,提高設備運行的可靠性和安全性的技術效果。
- 還沒有人留言評論。精彩留言會獲得點贊!