基于圖像識別的零件檢查方法、裝置及其電子設備與流程
本發明涉及智能制造,尤其涉及一種基于圖像識別的零件檢查方法、裝置及其電子設備。
背景技術:
1、在數字化設計和制造領域,零件檢查是確保產品質量和生產效率的關鍵環節。傳統的零件檢查方法主要依賴于人工操作,效率低下且容易出錯。
2、傳統的基于圖元識別的零件檢查方法,通過識別設計文件中的圖元(如線條、圓、弧等)并與其對應的制造規則進行比較,從而判斷設計是否符合制造要求。
3、圖元識別技術在精度上具有較高的可靠性,然而在實踐中發現其算法開發復雜、耗時,且識別效率和穩定性不足,對圖元微小變化敏感,導致評審時間長且投入成本增加。
技術實現思路
1、本發明提供一種基于圖像識別的零件檢查方法、裝置及其電子設備,用以解決現有技術采用圖元識別技術所存在的識別速度慢、兼容性差、維護難度大的缺陷。
2、本發明提供一種基于圖像識別的零件檢查方法,包括如下步驟:
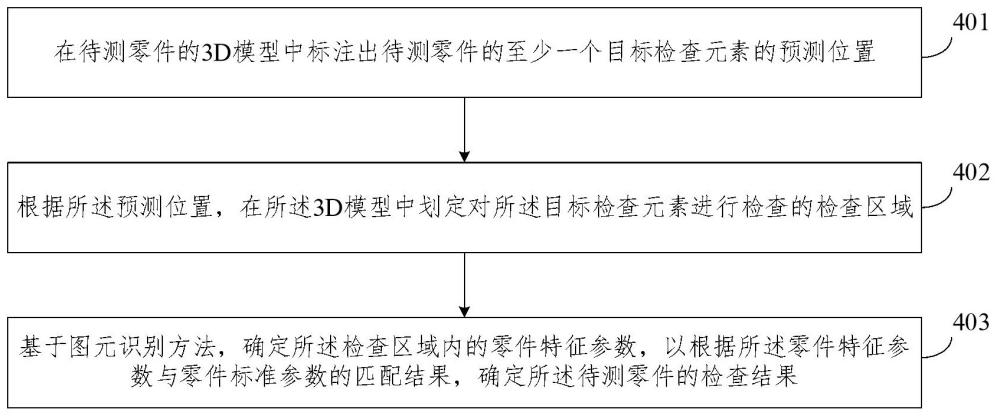
3、在待測零件的3d模型中標注出待測零件的至少一個目標檢查元素的預測位置。
4、根據所述預測位置,在所述3d模型中劃定對所述目標檢查元素進行檢查的檢查區域。
5、基于圖元識別方法,確定所述檢查區域內的零件特征參數,以根據所述零件特征參數與零件標準參數的匹配結果,確定所述待測零件的檢查結果。
6、根據本發明提供的一種基于圖像識別的零件檢查方法,所述基于圖像識別算法,在待測零件的3d模型中標注出目標檢查元素的預測位置,包括:
7、獲取所述待測零件的3d模型在特定視角下的檢測圖片;
8、調取所述待測零件的模板庫,所述模板庫包含的任一模板是預先對所述待測零件對應的標準零件的所述目標檢查元素所在區域進行設計或拍攝后構建的;
9、將所述檢測圖片與所述模板庫中的每個模板圖片進行特征比對;
10、在確定所述檢測圖片上存在與任一模板圖片相匹配的匹配區域的情況下,輸出所述匹配區域對應的特征像素點坐標;
11、根據所述特征像素點坐標確定所述目標檢查元素的預測位置。
12、根據本發明提供的一種基于圖像識別的零件檢查方法,所述根據所述特征像素點坐標確定所述目標檢查元素的預測位置,包括:
13、確定所述檢測圖片的像素點坐標與真實坐標之間的比例尺;
14、基于所述比例尺,將所述特征像素點坐標換算成所述目標檢查元素的所述預測位置在所述檢測圖片中的真實坐標。
15、根據本發明提供的一種基于圖像識別的零件檢查方法,所述比例尺是采用以下方式確定的:
16、在所述3d模型所在界面生成一預設尺寸的立方體,所述立方體與所述3d模型不重疊;
17、在獲取所述待測零件的3d模型在特定視角下的檢測圖片時,將所述立方體在所述特定視角下的圖像同步生成在所述檢測圖片中;
18、通過所述立方體的預設尺寸和所述立方體在所述檢測圖片中的像素值,確定所述比例尺。
19、根據本發明提供的一種基于圖像識別的零件檢查方法,在確定所述檢測圖片上存在與任一模板圖片相匹配的匹配區域的情況下,輸出所述匹配區域對應的特征像素點坐標,包括:
20、在確定所述檢測圖片上存在與任一模板圖片相匹配的匹配區域的情況下,確定所述匹配區域與所述立方體在所述特定視角下的圖像之間的位置關系;
21、根據所述位置關系和所述立方體在所述檢測圖片中的像素值,確定所述匹配區域對應的特征像素點坐標。
22、根據本發明提供的一種基于圖像識別的零件檢查方法,所述將所述檢測圖片與所述模板庫中的每個模板圖片進行特征比對,包括迭代執行以下步驟,直至獲取到所述匹配區域或者遍歷所述模板庫中的所有模板圖片:
23、調取所述模板庫中的任一模板圖片;
24、在所述檢測圖片中滑動所述任一模板圖片,并確定每次滑動后所述任一模板在所述檢測圖片中的滑動區域圖片與所述任一模板圖片之間的特征相似度得分;
25、若從所有特征相似度得分中所確定的最高特征相似度得分大于預設閾值,則確定所述檢測圖片上存在與所述任一模板圖片相匹配的匹配區域;
26、否則,重新選取除所述任一模板圖片之外的其他任一模板圖片,直至遍歷所述模板庫中的所有模板圖片。
27、根據本發明提供的一種基于圖像識別的零件檢查方法,所述根據所述預測位置,在所述3d模型中劃定對所述目標檢查元素進行檢查的檢查區域,包括:
28、在所述3d模型中,以所述預測位置對應的在所述檢測圖片中的真實坐標為圓心,以預設直徑畫圓;
29、通過沿所述特定視角方向對所繪制的所述圓進行掃掠操作,生成一個圓柱體;所述圓柱體的上下底面不突出于所述待測零件的所有平面;
30、將所述圓柱體所在的區域設置為所述檢查區域。
31、根據本發明提供的一種基于圖像識別的零件檢查方法,所述獲取所述待測零件的3d模型在特定視角下的檢測圖片,包括:
32、根據所述待測零件的檢查項和設計規范,選擇完整顯示所述目標檢查元素的結構特征和位置特征的多個視角;
33、獲取所述多個視角中的至少一個視角作為所述特定視角進行渲染,獲取所述檢測圖片;
34、對應地,若在確定所述檢測圖片上不存在與任一模板圖片相匹配的匹配區域的情況下,則從所述多個視角中選擇一個新的視角作為所述特定視角進行渲染,獲取新的檢測圖片,直至確定所述新的檢測圖片上存在與任一模板圖片相匹配的匹配區域或者遍歷所述多個視角。
35、根據本發明提供的一種基于圖像識別的零件檢查方法,所述模板庫中的模板圖片是采用以下方式預先構建的:
36、根據所述待測零件的檢查項和設計規范,確定需要創建模板圖片的區域,并確定所述模板圖片所包含的特征信息;
37、使用3d建模軟件或二維設計軟件繪制所述區域對應的圖片作為所述模板圖片,或對標準零件的所述區域進行拍攝掃描后得到所述模板圖片;
38、將所述模板圖片存儲到所述模板庫中,并建立每個所述模板圖片的索引。
39、根據本發明提供的一種基于圖像識別的零件檢查方法,所述基于圖元識別方法,確定所述檢查區域內的零件特征參數,包括:
40、調取所述檢查區域內的3d模型參數,以根據所述3d模型參數確定每個檢查點的零件特征參數。
41、本發明還提供一種基于圖像識別的零件檢查裝置,包括如下模塊:
42、圖像識別單元,用于在待測零件的3d模型中標注出待測零件的至少一個目標檢查元素的預測位置。
43、區域定位單元,用于根據所述預測位置,在所述3d模型中劃定對所述目標檢查元素進行檢查的檢查區域。
44、圖元檢查單元,用于基于圖元識別方法,確定所述檢查區域內的零件特征參數,以根據所述零件特征參數與零件標準參數的匹配結果,確定所述待測零件的檢查結果。
45、本發明還提供一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現如上述任一種基于圖像識別的零件檢查方法。
46、本發明還提供一種非暫態計算機可讀存儲介質,其上存儲有計算機程序,該計算機程序被處理器執行時實現如上述任一種基于圖像識別的零件檢查方法。
47、本發明還提供一種計算機程序產品,包括計算機程序,所述計算機程序被處理器執行時實現如上述任一種基于圖像識別的零件檢查方法。
48、本發明提供的基于圖像識別的零件檢查方法、裝置及其電子設備,結合像素點坐標轉換技術通過在3d模型中快速定位出待測零件的相關目標檢查元素的坐標位置,以確定需要針對性檢測的檢查區域,再利用圖元識別算法獲取到檢查區域內圖元的零件特征參數,有效解決了圖元識別速度慢的問題,從而能迅速、精確地實現零件檢查。
- 還沒有人留言評論。精彩留言會獲得點贊!