一種人工林生態系統恢復效果評估系統的制作方法
本發明涉及生態學,尤其涉及一種人工林生態系統恢復效果評估系統。
背景技術:
1、隨著生態環境問題的日益嚴重,生態恢復工程成為解決環境退化問題的重要手段。人工林作為生態恢復的一種重要形式,在改善生態環境和恢復生物多樣性方面發揮著重要作用。生態系統的退化和環境惡化問題已經引起了廣泛關注。
2、如中國專利cn111310639b公開的常綠人工林遙感識別方法及常綠人工林長勢遙感監測方法,雖然通過時間序列遙感影像對人工林的長勢進行監測,但是缺乏對生態效果的恢復效果進行細致的評估,同時缺乏評估手段,導致交互舒適性差和勞動強度低的缺陷。
3、同時,現有技術中還存在以下的幾個問題:
4、1.現有的生態評估方法和工具大多單一,無法全面、準確地評估人工林的生態系統生產狀態和生態恢復效果。傳統的評估方法往往僅考慮單一指標,缺乏對生態系統整體功能的綜合評估。
5、2.生態恢復是一個長期過程,期間可能會出現病蟲害、火災等突發問題。現有的監測手段難以實現實時監控和快速響應,導致問題發現不及時,影響恢復效果。
6、3.生態恢復效果需要通過長期的時空變化進行評估,而現有技術在對生態恢復前后的時空變化分析上存在不足,難以直觀展示生態恢復的進展和成效。
7、4.現有的評估系統在提供詳細分析報告和決策支持方面能力有限,無法為管理者提供全面、科學的參考數據。
8、為了解決本領域普遍存在缺乏評估手段、評估精度差、實時監測能力不足、時空分析融合手段缺乏、評估過程勞動強度高、評估滯后凸出和智能程度低等問題,作出了本發明。
技術實現思路
1、本發明的目的在于,針對目前所存在的不足,提出了一種人工林生態系統恢復效果評估系統。
2、為了克服現有技術的不足,本發明采用如下技術方案:
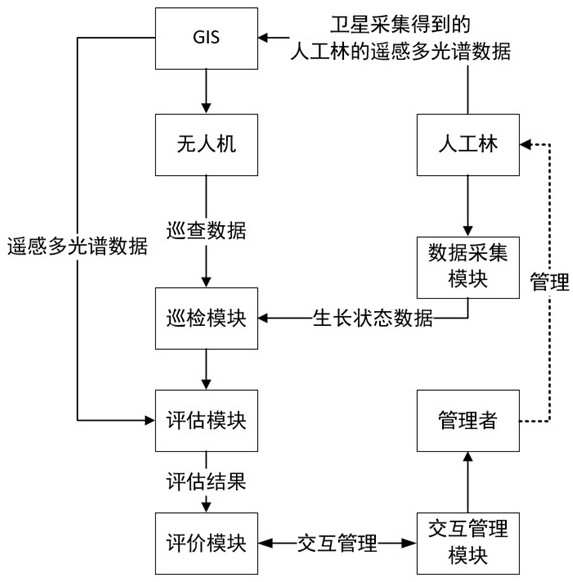
3、一種人工林生態系統恢復效果評估系統,所述效果評估系統包括服務器、以及無人機,所述效果評估系統還包括數據采集模塊、巡檢模塊評估模塊、評價模塊和交互管理模塊,所述服務器分別與所述數據采集模塊、巡檢模塊、評估模塊、評價模塊和交互管理模塊連接;
4、所述數據采集模塊對人工林區域的生長狀態數據、以及人工林種植區域的遙感多光譜影像數據,所述巡檢模塊裝載在所述無人機上,并對所述人工林巡檢以采集所述數據采集模塊采集得到的人工林區域的生長狀態數據,所述評估模塊根據所述數據采集模塊根據生長狀態數據、以及多光譜影像數據對人工林的實時生產力指數pi進行評估,所述評價模塊根據實時所述生產力指數pi、以及上一檢測周期的生產力指數pihistory進行評價,根據生態恢復評分確定生態恢復效果,所述交互管理模塊根據評價結果向管理者進行交互提示,并制定對應的管理策略;
5、所述數據采集模塊包括植物狀態采集單元和數據請求單元,所述植物狀態采集單元對所述人工林植株的生長狀態進行采集,所述數據請求單元向衛星發送數據請求,并獲取所述人工林種植區域的遙感多光譜影像數據;
6、其中,所述無人機裝載所述巡檢模塊并對所述人工林種植區域進行巡檢,并獲取所述植物狀態采集單元采集得到的人工林植株的生長狀態數據。
7、可選的,所述植物狀態采集單元包括扎土構件、抬升構件、采集構件和轉動構件,所述采集構件采集所述人工林植株的生長狀態數據,所述轉動構件對所述抬升構件的進行轉換,所述抬升構件對所述采集構件的采集位置進行調整,所述扎土構件將所述采集構件和轉動構件插入所述植株的生長土壤中;
8、其中,所述植物狀態采集單元沿著所述植株的根部的延伸范圍等間距插入植株的生長土壤中。
9、可選的,所述數據請求單元包括接收器、請求發送器和通信器,所述請求器向所述衛星發送數據請求,以使得所述衛星響應所述數據請求反饋對遙感多光譜影像數據,所述通信器將所述數據請求傳輸至所述衛星,所述接收器用于接收衛星反饋的遙感多光譜影像數據。
10、可選的,所述巡檢模塊包括數據接收單元和激活單元,所述激活單元用于激活對應的位置的所述植物狀態采集單元,以使得所述植物狀態采集單元將采集得到的所述人工林植株的生長狀態數據傳輸至所述數據接收單元中,所述數據接收單元用于接收所述植物狀態生長單元傳輸的所述人工林植株的生長狀態;
11、其中,所述激活單元包括無線發射器、天線和激活請求器,所述激活請求器獲取所述無人機的實時位置數據,并根據所述無人機的實時位置數據生成激活請求,所述無線發射器將所述激活請求發送至所述植物狀態采集單元中,以使得所述植物狀態采集單元響應所述激活請求將對應位置的植株的生長狀態數據傳輸至所述數據接收單元中。
12、可選的,所述評估模塊包括數據處理單元和評估單元,所述數據處理單元對所述生長狀態數據、以及多光譜影像數據進行處理,所述評估單元根據所述數據處理單元處理后的生長狀態數據、以及多光譜影像數據對人工林的生產力指數pi進行評估:
13、其中,所述生產力指數pi根據下式進行計算:
14、;
15、式中,h為濕度對生產力的影響系數,t為溫度對生產力的影響系數,n為營養物質對生產力的影響系數,i為綜合影響系數。
16、可選的,所述評價模塊獲取預處理后的評估結果,并根據下式計算生態恢復效果評分score:
17、;
18、式中,s碳匯為碳匯評分,s水源涵養為水源涵養評分,s土壤保持為土壤保持評分,s生物多樣性為生物多樣性評分,△pi為上一個周期生產力指數pihistory和實時生產力指數pi的差值;
19、若所述生態恢復效果評分score高于系統設定的高閾值h,則說明生態恢復良好。
20、可選的,所述交互管理模塊包括提示預警單元和策略制定單元,所述提示預警單元根據所述評價結果向管理者進行提示,所述策略指定單元將所述評價結果制定對應的管理策略;
21、其中,所述提示預警單元包括比較器、通信器和顯示管理器,所述比較器用于將所述生態恢復效果評分與設定評分等級進行比較,以觸發不同等級的預警提示,所述通信器將預警提示向所述顯示管理器傳輸,所述顯示管理器將預警提示向所述管理者進行提示。
22、可選的,所述扎土構件包括扎土桿、以及設置在扎土桿桿體上的至少一個檢測窗,所述扎土桿的桿體設有中空的放置腔,至少一個檢測窗沿著所述扎土桿的長度方向等間距的分布,并與所述放置腔貫通連接。
23、可選的,所述轉動構件包括支撐座、轉向座、轉向齒輪、轉向驅動機構、識別探頭、以及至少兩個定位標記件,所述支撐座設置在所述扎土桿的放置腔中,所述轉向座的一側外壁與所述支撐座鉸接形成鉸接部,所述轉向齒輪嵌套在所述轉向座上,所述轉向驅動機構與所述轉向齒輪嚙合,并驅動所述轉向座沿著鉸接部的軸線進行轉動,至少兩個定位標記件設置在所述轉向座轉動路徑上,所述識別探頭設置在所述轉向座上,并朝向至少兩個所述定位標記件的一側伸出。
24、可選的,所述抬升構件包括抬升桿、抬升驅動機構、本地控制器、以及高度檢測件,所述抬升桿的一端與所述抬升驅動機構驅動連接形成抬升部,所述抬升部設置在所述放置腔的內壁上,所述抬升桿的另一端朝向遠離抬升部的一側伸出,且其端部與所述轉向座連接,所述高度檢測件采集所述抬升桿的伸縮量,并反饋至所述本地控制器中,并通過所述本地控制器對所述抬升驅動機構進行控制,以精準控制所述抬升桿的抬升高度。
25、本發明所取得的有益效果是:
26、1.通過評估模塊和數據采集模塊之間的配合,使得人工林區域中的生長狀態能夠得到采集和評估,保證整個系統具有數據融合能力強、評估可靠性佳、智能程度高、評估及時性佳和實時監控能力強的優點;
27、2.通過巡檢模塊和數據采集模塊之間的相互配合,使得人工林的數據采集更加高效,保證整個系統具有數據采集便捷性高、勞動強度低、采集可靠性高、數據采集協同能力佳和智能程度高的優點;
28、3.通過評價模塊和評估模塊的相互配合,使得人工林的狀態前后得到評價,保證了人工林區域的恢復狀態的動態監控,使得整個系統具有動態監控能力強、恢復評估水平高、評估迅速和智能程度高的優點;
29、4.通過交互管理模塊和評價模塊之間的相互配合,使得人工林的恢復狀態能夠得到評估,保證整個系統具有精細化管理能力強、評估迅速、監測水平高、評估過程可靠性強和智能程度高的優點。
- 還沒有人留言評論。精彩留言會獲得點贊!