基于動態軟擬合信號匹配算法的工部件輪廓標定方法與流程
本發明涉及缺陷檢測的,尤其是一種基于動態軟擬合信號匹配算法的工部件輪廓標定方法。
背景技術:
1、在現有的工業質檢技術當中,物料的輪廓提取方法通常是將物料固定在檢驗機臺上,由工業相機在不同尺寸視野下,按照特定軌跡進行掃描識別采集圖片,并對掃描出的物料圖像進行物料輪廓提取。部分物料輪廓較為清晰、平整,但由于物料的現有工藝及設備的限制,不同物料的生產流程可能會產生物料不同形態的缺陷,比如物料歪斜、翻折或缺料等缺陷。這些缺陷發生的情況常常會使物料輪廓標注定位出現提取失敗或不準確的現象。且相同環境下拍攝到不同材質的物料圖像差異較大。部分物料背景清晰簡潔的圖像可通過機臺設備準確提取物料邊緣,但背景復雜的物料圖像提取時可能會產生誤差。現有的解決方案是采用人工核對的方法將掃描提取出的物料輪廓逐個進行復查,人為校正物料輪廓,這種方法耗費大量人力,增加項目成本,同時效率也很難提高。
技術實現思路
1、本發明旨在至少解決現有技術中存在的技術問題之一。
2、為此,本發明提出一種基于動態軟擬合信號匹配算法的工部件輪廓標定方法,即為基于輪廓的一維信號相似度匹配的方法,提高輪廓的匹配效果,進而提高輪廓標定的準確率,從而提高設備模型精確度,減少現場工作難度。
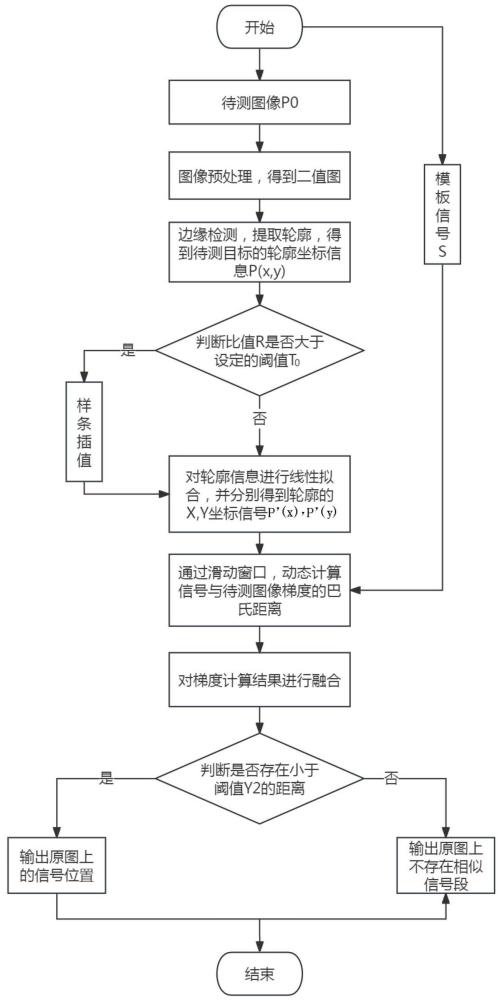
3、根據本發明實施例的基于動態軟擬合信號匹配算法的工部件輪廓標定方法,包括以下步驟:
4、第1步驟、獲取數據:獲取待匹配信號的待測圖像;獲取模板信號,模板信號的長度為;從模板信號中截取長度為的局部模板信號,其中,,為橫坐標局部模板信號,為縱坐標局部模板信號;
5、第2步驟、圖像預處理,得到二值圖:對待匹配信號的待測圖像進行圖像預處理,灰度化,采用傅里葉低通濾波器,得到平滑后的待測圖像;
6、第3步驟、邊緣檢測:采用canny算子對待測圖像進行邊緣檢測,并提取待測目標的輪廓特征,得到待測目標的輪廓坐標信息,即,對進行線性擬合,根據擬合后的直線的水平夾角對輪廓進行旋轉,最后得到旋轉后的輪廓坐標信息;
7、第4步驟、數據增廣:計算的長度與模板信號的長度的輪廓長度差,并將輪廓長度差除以和中最小的那個值,得到比值;
8、判斷比值是否大于設定的閾值:
9、當判斷比值大于設定的閾值時,則樣條插值,隨即進入第5步驟;
10、當判斷比值小于等于設定的閾值時,則直接進入第5步驟;
11、第5步驟、計算信號梯度:提取的x坐標與y坐標得到信號,并對其進行周期延拓;計算周期延拓后的一階導數,得到,?同時計算模板信號的一階導數,得到;
12、第6步驟、信號匹配:對進行滑動窗口,其中滑動窗口的大小為局部模板信號的長度,滑動步長為1個單位長度;依次計算每個滑動窗口內的信號與局部模板信號之間的巴氏距離,最終得到關于x坐標信號與y坐標信號兩組巴氏距離列表,;
13、第7步驟、自適應加權融合,:自適應加權融合算法得到融合后的距離列表,選擇列表中的最小值作為相似度最高的信號段。
14、本發明的有益效果是,采用基于輪廓的一維信號相似度匹配的方法,提高輪廓的匹配效果,進而提高輪廓標定的準確率,從而提高設備模型精確度,減少現場工作難度。
15、根據本發明一個實施例,在所述第2步驟中,傅里葉低通濾波的公式是:
16、(1)
17、(2)
18、其中,公式(1)和公式(2)中的符號所表達的含義具體如下:
19、表示待匹配信號的待測圖像的傅里葉變換形式;
20、表示選取的一個濾波器變換函數,以原點為圓心,d為半徑的圓內,無衰減地通過所有頻率,再圓外截斷所有頻率;
21、表示通過減少的高頻部分來得到的結果,即運用傅里葉逆變換得到平滑后的圖像;
22、表示低通濾波器的截至頻率。
23、根據本發明一個實施例,在所述第3步驟中,擬合后的直線的水平夾角的取值范圍是:
24、當擬合后的直線的水平夾角大于零時,則對輪廓進行順時針旋轉;
25、當擬合后的直線的水平夾角小于零時,則對輪廓進行逆時針旋轉;
26、當擬合后的直線的水平夾角等于零時,則不對輪廓做旋轉操作。
27、根據本發明一個實施例,在所述第3步驟中,canny邊緣檢測算法中使用sobel算子計算圖像梯度幅值和方向,為水平方向的卷積模板,為垂直方向的卷積模板,,;
28、梯度幅值的計算公式是:
29、(3)
30、其中,公式(3)中的符號所表達的含義具體如下:
31、表示梯度幅值;
32、表示使用水平模板卷積后得到的水平方向梯度幅值;
33、表示使用垂直模板卷積后得到的垂直方向梯度幅值;
34、梯度方向的計算公式是:
35、(4)
36、其中,公式(4)中的符號所表達的含義具體如下:
37、表示梯度方向。
38、根據本發明一個實施例,在所述第3步驟中,
39、順時針旋轉的公式是:
40、(5)
41、(6)
42、逆時針旋轉的公式是:
43、(7)
44、(8)
45、其中,公式(5)、公式(6)、公式(7)和公式(8)中的符號所表達的含義具體如下:
46、表示旋轉前的坐標;
47、表示旋轉后的坐標;
48、表示擬合后的直線的水平夾角。
49、根據本發明一個實施例,在所述第4步驟中,當判斷比值大于設定的閾值時,其中,閾值的取值為0.3,則對旋轉后的輪廓坐標信息進行三次樣條插值,三次樣條插值的公式是:
50、(9)
51、根據本發明一個實施例,在所述第4步驟中,當的長度偏小時,則進行上采樣;反之則進行下采樣,即當的長度偏大時,則進行輪廓點集的下采樣。
52、根據本發明一個實施例,在所述第5步驟中,一階導數的計算公式是:
53、(10)
54、(11)
55、其中,公式(10)和公式(11)中的符號所表達的含義具體如下:
56、x表示待測信號的x坐標信號;
57、y表示待測信號的y坐標信號;
58、表示x坐標信號的索引值。
59、根據本發明一個實施例,在所述第6步驟中,巴氏距離的計算公式是:
60、(12)
61、其中,公式(12)中的符號所表達的含義具體如下:
62、表示待測信號的梯度;
63、表示模板信號的梯度;
64、表示滑動窗口與局部模板信號的長度;
65、i表示1到ls之間的值,i=1,2,3…,ls;
66、表示巴氏距離,取值范圍為0到1,該距離越接近1,則信號匹配越相似;反之,該距離越接近0,則差異越大。
67、根據本發明一個實施例,在所述第7步驟中,判斷此時融合的巴氏距離是否小于閾值,其中,閾值是描述待測信號與模板信號差異的經驗值,閾值取值為0.05;若相似度最高的信號段的巴氏距離小于閾值,則判斷并輸出此信號段為匹配到的相似信號;若相似度最高的信號段的巴氏距離大于閾值,則判斷匹配失敗并輸出此信號段。
68、本發明的其他特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點在說明書以及附圖中所特別指出的結構來實現和獲得。
69、為使本發明的上述目的、特征和優點能更明顯易懂,下文特舉較佳實施例,并配合所附附圖,作詳細說明如下。
- 還沒有人留言評論。精彩留言會獲得點贊!