一種基于時間分離法預報騎浪/橫甩概率的方法
本發明屬于船舶與海洋工程領域,涉及一種基于時間分離法預報騎浪橫甩概率的方法。
背景技術:
1、騎浪/橫甩現象具有強非線性和稀有性,目前工程上普遍使用直接計數法預報騎浪/橫甩概率,但是需要樣本數量必須足夠多,且一個樣本必須包含若干騎浪/橫甩事件,因此需要大量的水動力數值仿真。時間分離法是一種可以預報騎浪/橫甩概率的方法,高效準確,不需要大量的水動力數值仿真。
2、目前已經有學者用時間分離法進行預報騎浪概率的研究。比如“楊晨.隨機波中船舶純穩性喪失及騎浪橫甩概率研究[d].大連理工大學,2021.”中使用了時間分離法進行預報騎浪概率,但是其在計算騎浪概率時,如果船舶超越中間閾值時的加速度達到了臨界加速度,就認為整個大概率事件的時間區間內都發生騎浪現象,計算得到的騎浪概率偏大。目前沒有學者用時間分離法進行預報橫甩概率的研究。
技術實現思路
1、針對現有技術存在的問題,本發明提供一種采用時間分離法預報數值模擬船舶騎浪/橫甩的概率,避免直接技術法中水動力數值仿真消耗大量的時間和計算資源,得到較為準確的概率結果。本發明所采用的時間分離法通過將極端、罕見的事件劃分為兩個易于處理的事件,即大概率事件和小概率事件,降低概率求解的難度。在本發明中:大概率事件是(即樣本超越了中間閾值)作為概率問題的中間隨機事件,其統計量可以通過數值仿真獲取足夠多的樣本來獲得;小概率事件是在中間隨機事件發生時進行計算,它負責表征概率問題中的實際物理含義,度量極端、罕見事件的發生概率。
2、為了實現上述目的,本發明采用如下技術方案:
3、一種基于時間分離法預報騎浪橫甩概率的方法,該方法首先,采用時間分離法計算騎浪概率;其次,采用時間分離法計算橫甩概率;最后,計算騎浪/橫甩概率。具體包括以下內容:
4、定義各參數:船舶相對速度u=v-c,其中,v為瞬時船速,c為瞬時波速;u0為船舶與波浪相對速度的中間閾值;為導致發生騎浪現象的最小相對加速度;γ為船舶艏搖角度;γ0為船舶艏搖角速度的中間閾值;為導致發生橫甩現象的確定最小艏搖角速度。
5、第一部分:計算騎浪概率
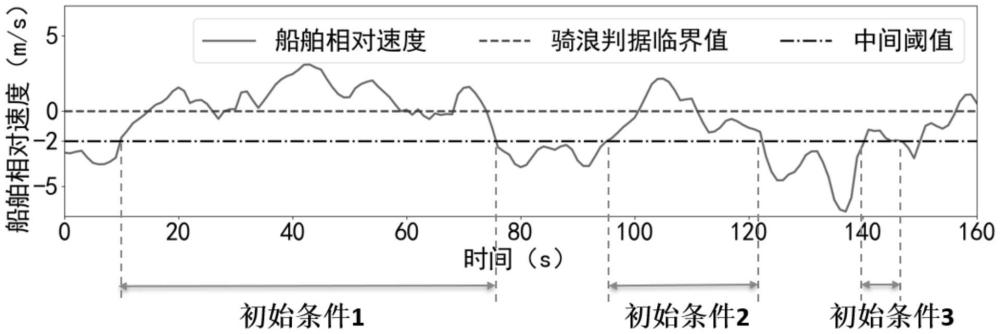
6、第一步:求解船舶相對速度u超越中間閾值u0的概率
7、所述的中間閾值u0為接近0的負值,通過時域數值仿真樣本進行直接計數獲得,如公式(1)所示:
8、
9、其中,nu為船舶相對速度時域樣本數據中超過中間閾值u0的觀測點的數量;nt為每組樣本中時域樣本數據中觀測點的數量,共得到n組樣本。所述的船舶相對速度時域樣本數據包括船舶速度時程、波浪速度時程、艏搖角時程、波浪信息、船舶位置時程等。
10、第二步:確定上跨中間閾值u0時刻,可能導致發生騎浪現象的最小相對加速度根據不同加速度初始條件的模擬的結果,可以找到發生騎浪現象的最小相對加速度。
11、2.1)針對每一個樣本時程中,截取所有船舶相對速度u超越中間閾值u0的時間段,得到小概率事件模擬的初始條件,包括船舶速度、波浪速度、艏搖角、波浪信息,船舶位置。對所有樣本作相同處理,分別得到m組初始條件(即每個第n組樣本都有m個初始條件)。
12、2.2)針對一組初始條件,控制時間、船舶當前位置、船舶當前速度、船舶六自由度搖蕩位移、波浪相位、隨機波的子波頻率和幅值不變,在[0,5]m/s2范圍內改變初始相對加速度,進行一系列模擬,找到導致騎浪的最小相對加速度
13、第三步:求解騎浪小概率事件概率prare。
14、針對第二步中每個樣本的每一組初始條件,都選取導致發生騎浪現象的確定最小相對加速度進行小概率事件模擬。由于這些初始條件將導致船舶很容易出現騎浪現象,小概率事件模擬時間較少。小概率事件模擬不需要特別多的樣本,可以節約計算成本和時間成本。計算各個導致發生騎浪現象的確定最小相對加速度作為初始條件時小概率事件模擬中發生騎浪的概率以及小概率事件模擬中出現不同加速度的概率則騎浪小概率事件概率prare可以表示為:
15、
16、其中,prare表示騎浪小概率事件概率;為出現不同加速度的概率;為各個相對加速度作為初始條件時發生騎浪的概率;i表示小概率事件模擬中統計的第i個加速度,n表示小概率事件模擬中選用的加速度的個數。
17、第四步:求解騎浪大概率事件概率。
18、將大概率事件設置為船舶與波浪的相對速度上穿中間閾值u0時,且上穿時刻相對加速度超過可能導致發生騎浪現象的閾值大概率事件可以直接通過時域數值仿真樣本進行直接計數獲得。船舶騎浪現象的大概率事件的概率pnan-rare通過公式(3)求得:
19、
20、其中,表示船舶相對速度超越中間閾值的概率;表示在u>u0的前提下,相對加速度超過可能導致發生騎浪現象的相對加速度的概率,二者都可以通過對數值仿真樣本進行直接計數獲得。
21、第五步:計算騎浪概率p。騎浪概率計算見式(4)。
22、
23、其中,為船舶騎浪現象的大概率事件的概率,通過公式(3)求得;為騎浪小概率事件概率,通過公式(2)求得。
24、第二部分:計算橫甩概率
25、該部分定義:γ為船舶艏搖角度;γ0為船舶艏搖角度的中間閾值;為導致發生橫甩現象的最小艏搖角速度。
26、第一步:求解船舶艏搖角度超越中間閾值γ0的概率
27、所述的中間閾值γ0為小于7.5°的值,通過時域數值仿真樣本進行直接計數獲得,如公式(5)所示:
28、
29、其中,nu為船舶艏搖角度時域樣本數據中超過中間閾值γ0的觀測點的數量;nt為每組樣本中時域樣本數據中觀測點的數量,共得到n組樣本。所述的船舶艏搖角度時域樣本數據包括船舶速度時程、波浪速度時程、艏搖角時程、波浪信息、船舶位置時程等。
30、第二步:確定上跨中間閾值γ0時刻,可能導致發生橫甩現象的最小艏搖角速度根據不同艏搖角加速度初始條件的模擬的結果,可以找到發生橫甩現象的最小艏搖角速度
31、2.1)針對每一個樣本時程中,截取所有船舶艏搖角速度γ超越中間閾值γ0的時間段,得到小概率事件模擬的初始條件,包括船舶速度、波浪速度、艏搖角、波浪信息,船舶位置。對所有樣本作相同處理,得到m組初始條件。
32、2.2)針對一組初始條件,控制時間、船舶當前位置、船舶當前速度、船舶六自由度搖蕩位移、波浪相位、隨機波的子波頻率和幅值不變,在[0,3]rad/s范圍內改變初始船舶艏搖角速度,進行一系列模擬,找到導致橫甩的最小船舶艏搖角速度
33、第三步:求解橫甩小概率事件概率prare。
34、針對第二步中每個樣本的每一組初始條件,都選取導致發生橫甩現象的確定最小舶艏搖角速度進行小概率事件模擬。由于這些初始條件將導致船舶很容易出現橫甩現象,小概率事件模擬時間較少。小概率事件模擬不需要特別多的樣本,可以節約計算成本和時間成本。計算各個導致發生橫甩現象的舶艏搖角速度作為初始條件時小概率事件模擬中發生橫甩的概率以及大概率事件模擬中出現不同艏搖角速度的概率則橫甩小概率事件概率prare可以表示為:
35、
36、其中,prare表示橫甩小概率事件概率;為出現不同角速度的概率;為各個角速度作為初始條件時發生橫甩的概率;i表示小概率事件模擬中統計的第i個角速度,m表示小概率事件模擬中選用的角速度的個數。
37、第四步:求解橫甩大概率事件概率。
38、將大概率事件設置為船舶艏搖角度上穿中間閾值γ0時,且上穿時刻相對加速度超過可能導致發生橫甩現象的閾值大概率事件可以直接通過時域數值仿真樣本進行直接計數獲得。船舶橫甩現象的大概率事件的概率pnan-rare通過公式(7)求得:
39、
40、其中,表示船舶艏搖角度超越中間閾值的概率;表示在γ>γ0的前提下,船舶艏搖角速度超過可能導致發生橫甩現象的艏搖角速度的概率,二者都可以通過對數值仿真樣本進行直接計數獲得。
41、第五步:計算橫甩概率p。橫甩概率計算見式(8)。
42、
43、其中,為船舶橫甩現象的大概率事件的概率,通過公式(7)求得;
44、為橫甩小概率事件概率,通過公式(6)求得。
45、第三部分:通過第一部分騎浪概率和第二部分橫甩概率的計算過程所示,本發明可以使用時間分離法,通過某個海況下的若干時域數值仿真樣本分別計算船舶在某個海況下發生騎浪和橫甩的概率。
46、本發明與現有技術相比具有以下有益效果:
47、(1)本發明與直接計數法相比可以減少需要計算的樣本,節約大量計算資源。
48、(2)采用本發明的方案可以有效預報某一隨機波海況下的騎浪橫甩概率,為船舶航行提供參考。
- 還沒有人留言評論。精彩留言會獲得點贊!