一種整車垂向控制模型快速轉化方法
本發明涉及汽車,具體來說,是一種整車垂向控制模型快速轉化方法。
背景技術:
1、隨著汽車技術的進行和發展,乘坐舒適性對用戶體驗至關重要。由于用戶對乘坐舒適性的要求越來越高,提高車輛乘坐舒適性面臨更加嚴峻的挑戰。廣義乘坐舒適性包括乘員的觸覺、視覺和聽覺輸入的主觀感知。其中,行駛的車輛在道路激勵或車輛內部激勵下引起的,從人-車接觸面傳遞到乘員的振動輸入定義為行駛平順性,主要集中在低頻和中頻的評價和調教。
2、車輛系統具有復雜動態特性,許多設計參數都會對車輛行駛平順性產生影響。在車輛底盤開發流程中,使用微分代數方程(dae),建立精確車輛多體動力學模型,包括輪胎、懸架機構、轉向系統、車體等,精確模擬給定輸入下車輛動態響應,并通過正向設計,優化車輛設計參數,提高車輛行駛平順性。
3、為了提高車輛行駛平順性,主動/半主動懸架廣泛應用于整車系統中。在控制算法開發流程中,車輛dae模型無法滿足實時性要求。因此,在控制算法模型中,利用懸架垂向等效剛度和阻尼特性連接簧下質量和簧上質量,構建簡化的車輛垂向模型,采用微分方程(ode),滿足實時性要求。
4、公告號為cn106644519a的發明專利提供了一種車輛垂向動力學模型參數辨識的方法及裝置,該車輛垂向動力學模型參數辨識的方法包括:獲取車輛進行四立柱試驗后的試驗結果數據,試驗結果數據包含:垂向加速度信息、垂向速度信息和垂向位移信息;利用垂向加速度信息、垂向速度信息和垂向位移信息,結合解耦的半車振動模型,通過線性估計方法獲得半車振動模型的待辨識參數的初始解;將垂向加速度信息、垂向速度信息、垂向位移信息變換到頻域,結合待辨識參數的初始解,進行非線性最小二乘擬合,辨識得到半車振動模型的待辨識參數的最終解。
5、公告號為cn116820108a的發明專利公開了用于路徑跟蹤任務的車輛模型在線辨識方法及裝置,該方法包括:構建車輛運動過程中的多種基本模型;根據多種基本模型和輸入矩陣以及系統矩陣構建車輛軌跡跟蹤模型;基于車輛運行數據計算中間矩陣得到第一計算結果,并根據第一計算結果和預設精度閾值的比較結果求解待辨識的輸入矩陣得到第二計算結果;基于第二計算結果計算臨時矩陣得到的第三計算結果計算待辨識的系統矩陣,以根據計算的第四計算結果完成車輛軌跡跟蹤模型的車輛參數在線辨識。
6、公告號為cn115782888a的發明專利提供了一種考慮測量誤差和軸距誤差的車輛參數辨識方法及系統,包括基于目標車輛的數學模型,考慮測量誤差和軸距誤差,構造目標函數;獲取目標車輛的機械信息,并設置標定參數;根據所述標定參數,實時采集目標車輛的運動信息;基于所述機械信息和所述運動信息對所述目標函數進行優化,得到優化結果;利用所述優化結果對目標車輛參數進行更新;重復步驟對目標車輛參數進行滾動更新。該發明根據實時測量的數據,構建出包含傳感器測量誤差與車輛參數誤差的殘差方程,利用非線性最小二乘法優化的方法求解得到傳感器測量誤差與車輛參數的誤差。
7、以上現有的專利均基于車輛動態數據,利用參數辨識方法,獲取車輛模型參數。該方法需要通過實車實驗或車輛仿真測試,采集大量的數據,無法快速構建車輛ode模型。同時,其模型參數只針對特定工況,并且忽略懸架的k&c特性、轉向系統等,不具有普遍性。
技術實現思路
1、本發明的目的是提供一種整車垂向控制模型快速轉化方法,以解決現有技術中存在的問題。
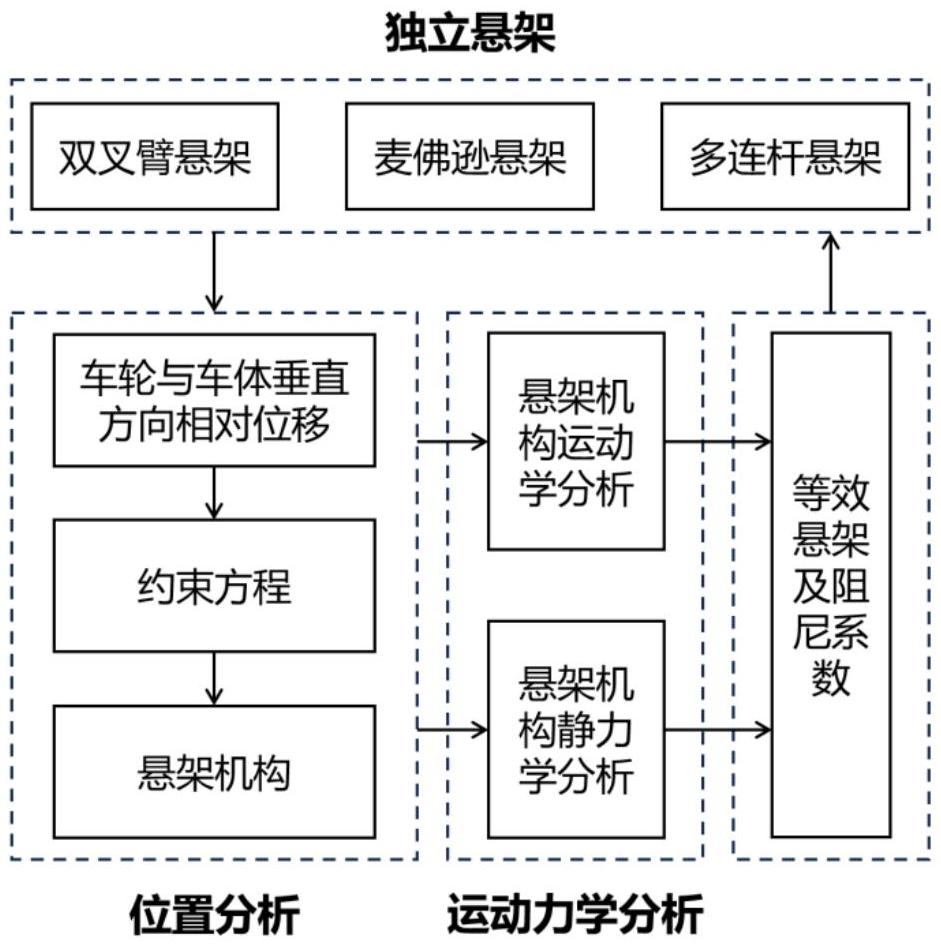
2、本專利的目的是這樣實現的:一種整車垂向控制模型快速轉化方法,包括獨立懸架機構運動力學分析步驟、懸架垂向等效剛度和阻尼特性辨識步驟、模型快速轉化應用程序開發步驟:
3、其中,在所述獨立懸架機構運動力學分析步驟中,針對雙叉臂、麥佛遜、多連桿三種獨立懸架機構,以車輪與車體間相對垂向位移為輸入,進行懸架機構的位移狀態分析,確定懸架機構的位置變化關系,利用瞬時旋量對空間懸架機構靜力學和運動學特征進行精確表征。
4、進一步地,在所述懸架垂向等效剛度和阻尼特性辨識步驟中,考慮懸架機構的非線性靜力學和運動學特征,根據懸架機構的運動力學關系,確定懸架機構的垂向等效剛度和阻尼特性,應用于整車垂向模型的動力學分析。
5、進一步地,在模型快速轉化應用程序開發步驟中,利用matlab?app設計工具創建程序,完成圖形用戶界面的可視化組件設計和app行為編程,生成面向對象的應用程序。
6、進一步地,所述模型快速轉化應用程序開發步驟包括如下子步驟:
7、其一,在圖形用戶界面中,包括懸架機構設計參數輸入窗口、懸架垂向等效剛度和阻尼特性可視化窗口以及參數導出窗口;
8、其二,使用集成的matlab編輯器,定義app的行為,精確計算懸架垂向等效剛度和阻尼特性;
9、其三,通過matlab?compiler生成相應應用程序,快速完成車輛底盤開發和控制算法開發模型間轉化。
10、進一步地,在所述獨立懸架機構運動力學分析步驟中,確定懸架機構的位置變化關系時,根據懸架轉動連接點的位置坐標變化以及相應連桿的長度,建立分段函數。
11、進一步地,在所述獨立懸架機構運動力學分析步驟中,在獨立懸架運動學分析環節中,建立車輪垂直方向速度的函數,相應參數包括:懸架機構的單位瞬時旋量、減震器力單位瞬時旋量、車輪垂直力單位瞬時旋量和減震器瞬時平移速度。
12、進一步地,在所述獨立懸架機構運動力學分析步驟中,在獨立懸架靜力學分析環節中,建立由彈簧引起的車輪垂直受力函數,相應參數包括:懸架機構的單位瞬時旋量、減震器力單位瞬時旋量、車輪垂直力單位瞬時旋量、減震器的彈性系數、減震器長度變化。
13、進一步地,在獨立懸架靜力學分析環節中,建立由阻尼引起車輪垂直受力函數,相應參數包括:懸架機構的單位瞬時旋量、減震器力單位瞬時旋量、車輪垂直力單位瞬時旋量、減震器的阻尼系數、減震器瞬時平移速度。
14、進一步地,在所述懸架垂向等效剛度和阻尼特性辨識步驟中,確定懸架機構的垂向等效剛度和阻尼特性時,建立懸架垂向等效剛度函數和懸架垂向等效阻尼函數。
15、進一步地,所述懸架垂向等效剛度函數的相應參數包括:懸架機構的單位瞬時旋量、減震器力單位瞬時旋量、車輪垂直力單位瞬時旋量、減震器的彈性系數、減震器長度變化、車輪與車體間垂直相對位移;
16、所述懸架垂向等效阻尼函數的相應參數包括:懸架機構的單位瞬時旋量、減震器力單位瞬時旋量、車輪垂直力單位瞬時旋量、減震器的阻尼系數。
17、相比于現有技術,本專利的有益效果如下:
18、1、該方法可以在“零原型”的前提下,通過理論分析,確定空間懸架的垂向等效剛度和阻尼特性,實現從精準的車輛多體動力學設計模型(dae)向整車垂向控制模型(ode)快速轉化;
19、2、該方法在空間懸架的垂向等效剛度和阻尼特性中,考慮了高度非線性懸架靜力學和運動學特征,提高整車垂向控制模型的精準度,為整車垂向控制系統開發提供模型基礎;
20、3、該方法具有高度的普遍性,可以對雙叉臂懸架、麥佛遜懸架以及多連桿懸架進行等效剛度和阻尼特性辨識,直接建立懸架機構與整車垂向控制模型間參數映射關系,提高車輛結構設計與控制系統開發間模型一致性。
- 還沒有人留言評論。精彩留言會獲得點贊!