用于檢測施工現場上的建筑部件的檢測方法和系統與流程
本發明涉及一種用于檢測施工現場上的建筑部件的方法和系統,特別是在殼體施工建造階段。此外,本發明涉及一種用于監測建筑物的施工進度的方法,特別是在殼體施工建造階段。
背景技術:
1、通過對建筑物進行技術監測,在施工階段已經可以確定是否遵守了預定的施工計劃或是否存在施工錯誤。可以通過相機或其他傳感器捕獲實際建筑物,并將其與建筑物的平面圖或模型進行比較。在此比較的基礎上,可以得出施工進度并識別可能的施工錯誤。
2、遵守施工計劃并檢測和預防施工錯誤對于建筑物的成功施工至關重要。施工錯誤會導致成本增加,因為需要糾正這些錯誤,進而導致時間延遲,這又會因為建筑物的驗收和調試延遲而對成本產生負面影響。到目前為止,施工錯誤和施工進度通常由專家在檢查和記錄中確定,這既耗時又費力。因此,許多公司需要能夠自動檢測施工錯誤和施工進度,而無需人工干預。
3、在施工期間獲取有關建筑物的信息的一種可能方法是使用無線傳感器單元,無線傳感器單元直接附接到施工現場的工作設備上。這種傳感器單元例如從wo?2020/038949a1中已知。根據設計,傳感器單元可以通過無線電系統傳輸例如工作設備的空間位置或例如溫度、濕度和壓力的測量值。不利的是,傳感器單元直接暴露在施工現場的惡劣環境條件下,這可能導致傳感器單元故障和測量數據錯誤。此外,除了穩定的無線電連接外,還必須確保對傳感器單元的可靠供電。無線傳感器單元的另一個缺點是附接、拆卸和維護傳感器單元所需的努力。此外,盜竊也是施工現場的一個問題。還有一個缺點是,具有無線傳感器單元的系統大多是為特殊應用而開發和優化的。調整傳感器單元以用于其他應用通常需要付出很大努力。
4、在記錄建筑物的施工進度方面,基于相機的系統更加靈活且更易于操縱。盡管這些系統無法提供建筑部件的諸如溫度、濕度或壓力等即時測量數據,但這些系統允許在建造階段,特別是在殼體施工建造階段全面概覽建筑物。借助圖像處理軟件,可以分析所捕獲的建筑物并將其與模型進行比較,從而確定施工進度。借助訓練數據,系統可以靈活地適應新條件和建筑物。
5、從wo?2019/137814?a1或de102018200221a1中已知一種用于監測施工現場的方法,其中通過成像傳感器視覺捕獲建筑物對象,并從所捕獲的圖像數據中識別建筑物對象的構造部分的特征。該特征可以例如是預制鋼筋混凝土墻的電氣安裝箱。成像傳感器可以布置在施工機械或起重機上。
6、從jp?2021026281?a和jp?2020181241?a中已知進一步的用于監測施工現場的方法。
7、在yang?jun等:“image-based?3d?semantic?modeling?of?building?facade(建筑立面的基于圖像的3d語義建模)”,2014年9月15日(2014-09-15),sat?2015?18thinternational?conference(sat?2015第18屆國際會議),美國德克薩斯州奧斯汀,2015年9月24-27日;[lecture?notes?in?computer?science;lect.notes?computer(計算機科學講義;計算機講義)],springer,柏林,海德堡,第661-671頁中,使用建筑立面的示例描述了一種基于3d模型的建模方法。從而從立體圖像中獲得點云。
8、借助成像傳感器監測建筑物時出現的一個典型問題是,建筑部件可能被其他建筑部件遮擋。例如,如果一堵墻壁建在另一堵墻壁或柱子后面,其對于相機可能僅部分可見,因此無法被可靠地識別。另一個問題是,由于顏色和結構相似,混凝土墻尤其難以與其他混凝土墻或天花板區分開來。如果不能正確識別各個墻壁和地板之間的過渡,就無法檢測到施工錯誤,也無法正確確定施工進度。
技術實現思路
1、根據這些解釋,本發明的目的是減輕或者甚至完全消除現有技術的缺點。優選地,本發明的目的是提供一種方法和系統,利用該方法和系統可以可靠地識別諸如墻壁或地板之類的建筑部件。此外,本發明的目的是提供一種方法,利用該方法可以可靠地監測施工進度。
2、這些目的通過根據權利要求1的用于檢測建筑部件的檢測方法、根據權利要求12的用于監測施工進度的方法和根據權利要求13的用于檢測建筑部件的系統來實現。從屬權利要求中給出了優選實施例。
3、根據本發明,根據權利要求1的檢測方法包括以下步驟:
4、i)在采集位置使用至少一個、優選至少兩個彼此間隔開的數碼相機采集施工現場的一個或多個相機圖像;
5、ii)在三維坐標系中生成數據點,優選地以點云的形式,這些數據點代表施工現場;
6、iii)識別三維坐標系中屬于在施工現場上的布置在成型位置的模板元件的數據點;
7、iv)根據當前施工進度在存儲的建筑模型中確定待建造的建筑部件(例如墻壁或天花板元件)的從采集位置可見的可見區域;
8、v)當模板元件布置在施工現場上的用于建造建筑部件的成型位置時,將屬于模板元件的數據點分配給待建造的建筑部件的可見區域;以及
9、vi)當指定數量的屬于模板元件的數據點被分配給待建造的建筑部件的可見區域時,檢測到施工現場上的建筑部件。
10、本發明基于這樣的發現:在許多情況下,施工現場上的模板元件比混凝土墻或混凝土天花板更顯眼,并且更容易被捕獲,混凝土墻或混凝土天花板在顏色和結構上相互融合,并且在某些情況下彼此很難區分。模板元件,特別是框架模板元件,由于其尺寸、顏色、結構和形狀,在建筑物中格外顯眼,因此可以通過圖像處理軟件更容易被識別和區分于其他物體。特別是,框架模板通常在背面具有易于識別的結構,例如橫撐,并在正面具有特征顏色和框架輪廓,具體取決于制造商。在用于墻壁的框架模板的情況下,還提供了用于錨桿的特征孔。如果模板元件現在在建筑工地上處于成型位置,則可以假定存在要用模板元件建造的建筑部件,即使澆注的混凝土可能尚未完全固化。本發明的一個優點是,還可以識別被其他建筑部件部分覆蓋的建筑部件,因為在分配屬于模板元件的數據點時,只考慮待建造的建筑部件的從采集位置可見的區域。為此,使用存儲的建筑物3d模型。該模型可以作為bim模型(bim=建筑信息建模)存在,或者可以從此類模型導出。該模型可以存儲在存儲器中。在步驟i)中,捕獲施工現場的一個或多個相機圖像。因此,施工現場包括待建造的結構,例如建筑物、橋梁或隧道,以及任何施工現場設備,特別是工作設備。至少一個數碼相機所在的采集位置優選為至少一個數碼相機可以從視角視覺捕獲整個待建造的建筑物的位置。顯然,也可以提供多個數碼相機,每個數碼相機捕獲建筑物的一部分,其中可以合并它們的相機圖像以描繪整個建筑物。優選地,采集位置基本上是靜態的,即不變的。然而,也可以規定采集位置隨時間變化。如果采集位置發生變化,則(再次)確定其位置。這可以例如手動完成或通過gnss單元(全球導航衛星系統)完成。然而,優選地通過施工現場上的控制點確定采集位置。控制點可以是例如(參考)標記,其布置在施工現場上并且其位置已知或已經測量。例如,可以使用帶有黑色符號的白板作為標記。控制點也可以是施工現場上的獨特點,例如,已經存在的建筑物的建造邊緣。獨特點的位置也是已知的,例如通過測量。控制點的優點在于,起重機因風或負載上升而產生的運動以及相機位置的變化都得到補償。如果提供多個數碼相機,則每個數碼相機都布置在其自己的采集位置。至少一個數碼相機可以設計為立體相機。然而,也可以提供兩個彼此間隔開的數碼相機來形成立體相機。在這種情況下,兩個數碼相機可以布置在例如公共支撐框架上。在步驟ii)中,生成在三維坐標系中表示施工現場的數據點。數據點優選采用點云的形式。數據點可以從先前記錄的、特別是二維的相機圖像中生成。但是,也可以通過距離測量裝置、特別是激光雷達系統(光成像、檢測和測距)生成數據點。每個數據點可以分配給三維空間中的一個位置。該位置由坐標確定。在步驟iii)中,識別屬于施工現場上的布置在成型位置的模板元件的那些數據點。模板的成型位置是這樣的位置:在該位置,可以將混凝土澆注到模板元件之間的接收空間中以制造建筑部件。例如,在待建造的垂直墻壁的情況下,可以通過模板元件垂直取向的事實來識別成型位置。可以通過分類和相關聯的分割來識別屬于模板元件的數據點。分類算法是現有技術中已知的。可以使用圖像分析庫和/或用訓練實例訓練的分類器(例如神經網絡)對單個像素進行分類。現有技術中已知用于對圖像中的對象進行分割和分類的算法。訓練數據可用于對模板元件進行分類。分類或分割可以在記錄的相機圖像中或在三維空間中生成的數據點中進行。如果在各個相機圖像中進行分割和分類,則三維坐標系中的數據點與相機圖像的像素相關聯,以確定屬于模板元件的那些數據點。如果數據點是從相機圖像的像素生成的,則已經給出了此關聯。還可以提供,在步驟iii)中還識別未處于成型位置的其他模板元件。然而,在檢測建筑部件時不考慮這些模板元件。在步驟iv)中,根據當前施工進度在存儲的建筑模型中確定待建造的建筑部件的從采集位置可見的可見區域。建筑部件的可見區域可以理解為包括例如從采集位置觀看時不會被其他(待建造的)建筑部件遮擋的那些區域。考慮當前的施工進度。施工進度指示哪些建筑部件已經建造,哪些尚未建造。可以通過確定建筑部件的哪些區域受到來自數碼相機所在采集位置的視覺光束的照射來確定可見區域。還考慮了數碼相機的取向(即對準)和固有相機參數。待建造的建筑部件可以是例如墻壁、地板或天花板。在步驟v)中,如果模板元件布置在施工現場上的用于建造建筑部件的成型位置,則將屬于模板元件的數據點分配給待建造的建筑部件的可見區域。模板元件被布置為特別用于在處于成型位置時建造建筑部件,并且模板元件與待建造的建筑部件的位置相鄰,并且優選地平行于其表面取向。最后,在步驟vi)中,當指定數量的屬于模板元件的數據點被分配給待建造的建筑部件的可見區域時,檢測到施工現場上的建筑部件。只要模板元件存在,建筑部件就可以被分類為“正在進行中”。有利的是,僅考慮待建造的建筑部件的可見區域,從而可以降低分配中的錯誤率。總之,如果模板元件可以分配給待建造的建筑部件,并且該建筑部件根據施工進度從采集位置至少部分地可見,則根據本發明的方法可以通過模板元件檢測到建筑部件(例如墻壁、天花板或地板)處于成型位置。步驟i)-vi)可以(但不必)按指定的順序執行。例如,步驟iv)也可以在步驟i)之前執行。如果技術上可行,單個步驟也可以在時間上至少部分重疊地執行。
11、根據優選實施例,規定將待建造的建筑部件的可見區域細分為虛擬單元,并且根據屬于模板元件的數據點在三維坐標系中的位置將屬于模板元件的數據點分配給建筑部件的單元,當至少一個數據點分別分配給建筑部件的指定數量的單元時,在施工現場檢測到建筑部件。可以通過將建筑模型中的所有建筑部件細分為單元并考慮那些受到來自數碼相機的采集位置的可見光束照射的單元來確定可見區域。優選地,如果數據點位于單元內,則將數據點分配給單元。單元可以是例如球形、圓柱形、長方體或立方體形狀。在一個實施例中,將待建造的建筑物細分為長方體形狀的單元,立方體的邊緣長5厘米至20厘米,特別是大約10厘米。單元可以突出到待建造的建筑部件的邊界之外。這樣,布置在待建造的建筑部件上的模板元件的數據點可以位于單元內。還可以在待建造的建筑部件9外部提供附加單元。
12、在步驟iii)中,可以基于對一個相機圖像或多個相機圖像的分割部分的分割和分類來執行對三維坐標系中屬于模板元件的數據點的識別。分割和分類方法從現有技術中已知。例如,可以使用專門調整的圖像處理算法或訓練的網絡。特別是,可以使用數據庫中的圖像分析庫和/或用訓練實例訓練的模型(例如神經網絡)進行分割。可以在相機圖像中通過分割和分類來識別模板元件。通過將三維空間中的數據點分配給相機圖像中的像素,可以識別屬于模板元件的那些數據點。特別是可以通過從相機圖像生成數據點來執行數據點到像素的分配。
13、在一個實施例中,可以規定,基于模板元件的取向和模板類型來區分模板元件是布置在成型位置還是存放位置,并且僅當模板元件布置在成型位置時才在步驟iii)中考慮模板元件。這意味著當模板元件處于存放位置時,不再考慮模板元件。模板元件是處于成型位置還是存放位置取決于模板類型及其取向。如果模板元件是用于垂直墻壁的模板元件,則當模板元件與墻壁垂直對齊且相鄰時,模板元件處于成型位置。如果模板元件布置為彼此平行且相對,從而在它們之間形成接收空間,則也可以假定它們處于成型位置。另一方面,如果模板元件靠在已經建造的墻壁上、布置在建筑物外或躺在地面上,則模板元件處于存放位置。如果模板元件是用于天花板的模板元件,當模板元件與待建造的天花板水平對齊且相鄰時,模板元件處于成型位置。另一方面,如果用于天花板的模板元件靠在墻壁上,則模板元件處于存放位置。
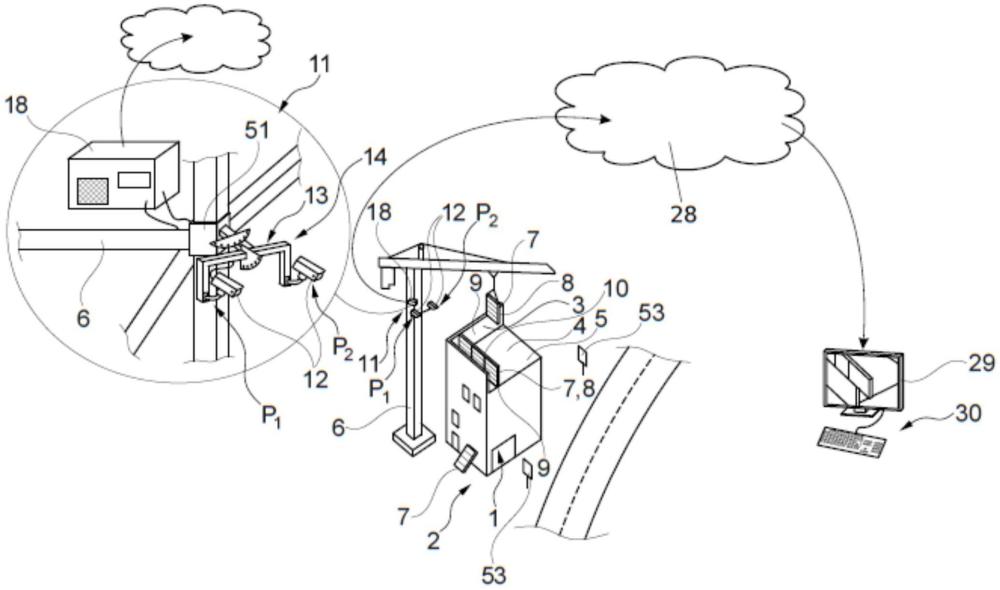
14、優選地,至少兩個數碼相機設置在各自的采集位置處,其中,至少兩個數碼相機形成立體相機,并且每個數碼相機基本同時記錄相機圖像。至少兩個數碼相機可以固定在支撐框架上,并通過連接元件(例如桿)相互連接。支撐框架可以包括鉸鏈,以使數碼相機在垂直和/或水平方向上對齊。此外,支撐框架可以包括緊固元件,特別是保持夾,用于將支撐框架緊固到物體(例如起重機)上。關于要捕獲的建筑物的大小,有利的是,至少兩個數碼相機彼此之間的距離至少為50cm,優選地至少為80cm或至少100cm。優選地,兩個數碼相機之間的距離基本上為120cm。每個數碼相機僅記錄二維相機圖像。
15、因此,在步驟ii)中,可以從至少兩個數碼相機的兩個同時捕獲的相機圖像生成三維坐標系中的數據點。數據點在三維空間中的位置可以從數碼相機的幾何特性和數碼相機之間的距離導出。
16、對于施工現場的視覺采集,如果采集位置設置在施工現場設備上,特別是起重機或柱子上,或者其他建筑物上,則是有利的。如果設置了多個數碼相機,則這些數碼相機的采集位置也可以設置在施工現場設備上或其他建筑物上。在特別優選的實施例中,設置了形成立體相機的兩個數碼相機,并且這些數碼相機的采集位置設置在施工現場設備上,特別是起重機上,或者其他建筑物上。有利的是,如果將至少一個數碼相機設置在高處,例如起重機或柱子上,則可以防止其損壞和被盜。
17、為了能夠更好地將數據點與建筑物的模型進行比較,如果在施工現場上設置一個或多個控制點,特別是一個或多個標記,并且根據一個或多個控制點對步驟ii)中的數據點進行定向和/或縮放,則是有利的。控制點可以特別通過標志或海報形成。替代地,控制點可以通過施工現場上的有特性的特征形成。控制點具有易于識別的圖案。借助至少一個控制點,簡化了三維坐標系中數據點的定向(即,對齊)和縮放。
18、就高效的數據處理而言,如果丟棄不屬于模板元件的數據點,則是有利的。換句話說,在步驟v)中僅使用屬于模板元件的數據點。
19、為了保護數據,如果在相機圖像和/或三維坐標系中的數據點中檢測到人,并且人的至少臉部被匿名化,例如通過像素化,則是有利的。可以通過分割相機圖像并對分割的圖像部分進行分類來檢測人和臉部。分割和分類方法是從現有技術中已知的。例如,可以使用特別調整的圖像處理算法或經訓練的網絡。特別是,數據庫中的圖像分析庫和/或用訓練實例訓練的模型,例如神經網絡,可用于分割。神經網絡優選用于分割。還可以通過在識別的臉部上放置區域來實現匿名化。重要的是,人對于人類觀察者不再是可清楚識別的。
20、如果模板元件是框架模板元件或天花板模板元件,則是有利的。這些類型的模板元件由于其形狀、結構和顏色而特別容易識別。框架模板由框架(特別是鋼框架)組成,其中插入并固定有模板面板。由于此特性,框架模板特別容易識別。天花板模板元件由模板支架支撐,并且通常具有前模板或邊緣模板,以防止混凝土泄漏。因此,天花板模板元件也容易識別。
21、根據本發明,還提供了一種用于監測建筑物的施工進度的方法,特別是在殼體施工建造階段。該方法包括以下步驟:
22、a)重復執行用于檢測上述類型的施工現場上的建筑部件的檢測方法;
23、b)如果已根據檢測方法的步驟vi)檢測到建筑部件,并且當在步驟v)中再次執行檢測方法時,屬于被布置在施工現場上用于建造建筑部件的模板元件的數據點不再被分配給建筑部件的可見區域,則將該建筑部件標記為已完成。
24、如果模板元件已從建筑部件中移除,并且因此在檢測方法的步驟v)中,屬于模板元件的數據點不再被分配給建筑部件,則可以假定澆注的混凝土已固化,因此建筑部件已完成。只要模板元件的數據點被分配給建筑部件,建筑部件就可以標記為“正在進行中”。因此,當建筑部件完成時,也可以更新施工進度。
25、本發明還涉及一種用于檢測施工現場上的建筑部件的系統,特別是在殼體施工建造階段。該系統從而包括:
26、至少一個、優選兩個數碼相機,用于從施工現場采集相機圖像,其中,至少一個數碼相機可以布置在采集位置;以及
27、處理單元,其被配置為執行以下步驟:
28、i)控制至少一個數碼相機從施工現場捕獲一個或多個相機圖像;
29、ii)在三維坐標系中生成數據點,優選以點云的形式,數據點表示施工現場;
30、iii)識別三維坐標系中屬于施工現場上的模板元件的數據點;
31、iv)根據當前建筑進度在存儲的建筑模型中確定例如墻壁或天花板元件的待建造的建筑部件的從采集位置可見的可見區域,其中,建筑模型存儲在存儲器中;
32、v)當模板元件布置在施工現場上的用于建造建筑部件的成型位置時,將屬于模板元件的數據點分配給待建造的建筑部件的可見區域;以及
33、vi)當指定數量的屬于模板元件的數據點被分配給待建造的建筑部件的可見區域時,檢測到施工現場上的建筑部件。
34、該系統因此被配置為執行上述方法。因此,該方法的所有優點、發展和特征都可以轉移到系統中。處理單元可以但不必由單個單元形成。處理單元還可以被提供作為由空間上彼此分離的多個(子)單元或模塊形成的分布式處理單元。步驟i)-vi)可以但不必按指定的順序執行。例如,步驟iv)也可以在步驟i)之前執行。這些步驟也可以在時間上重疊地執行。
35、在優選實施例中,提供至少兩個數碼相機,它們布置在支撐框架上,數碼相機彼此間隔至少50厘米,優選地間隔至少100厘米。支撐框架可以包括連接至少兩個數碼相機的桿。兩個數碼相機組成立體相機,用于生成三維圖像。
- 還沒有人留言評論。精彩留言會獲得點贊!