模型的訓練方法、裝置、設備及計算機存儲介質與流程
本技術屬于物聯網,尤其涉及一種模型的訓練方法、裝置、設備及計算機存儲介質。
背景技術:
1、隨著現代社會的發展,電力已經成為日常生活和工業生產的核心能源。電網作為輸送和分配電能的關鍵基礎設施,其穩定、安全和高效的運行對于整個社會的穩定都至關重要。然而,由于電網的復雜性、多節點性和多參數性,它容易受到各種內部和外部因素的影響,從而產生故障。近年來,大量的傳感器和監控系統已經被部署在電網中,為電網運維提供了豐富的數據。這些數據包括電壓、電流、頻率等關鍵參數,它們為故障檢測和預測提供了可能性。通過有效地分析和處理這些數據,可以更準確地預測和防止潛在的電網故障。
2、目前,使用極限學習機分類器進行電網中故障的預測是比較常見的。傳統的極限學習機分類器,利用從傳感器或監控系統中獲取到的數據,通常基于梯度下降算法等更新內部的權重和參數,進行極限學習機分類器的訓練。
3、但是,這種訓練方式的訓練速度較慢,存在局部最優的問題,而且訓練好的極限學習機分類器還存在泛化能力較低的問題。
技術實現思路
1、本技術實施例提供一種模型的訓練方法、裝置、設備及計算機存儲介質,基于食肉植物算法模型更新極限學習機分類器的權重和偏置,不僅提高了訓練速度,還優化了極限學習機分類器的泛化能力,減少了局部最優問題的風險。
2、第一方面,本技術實施例提供一種模型的訓練方法,包括:
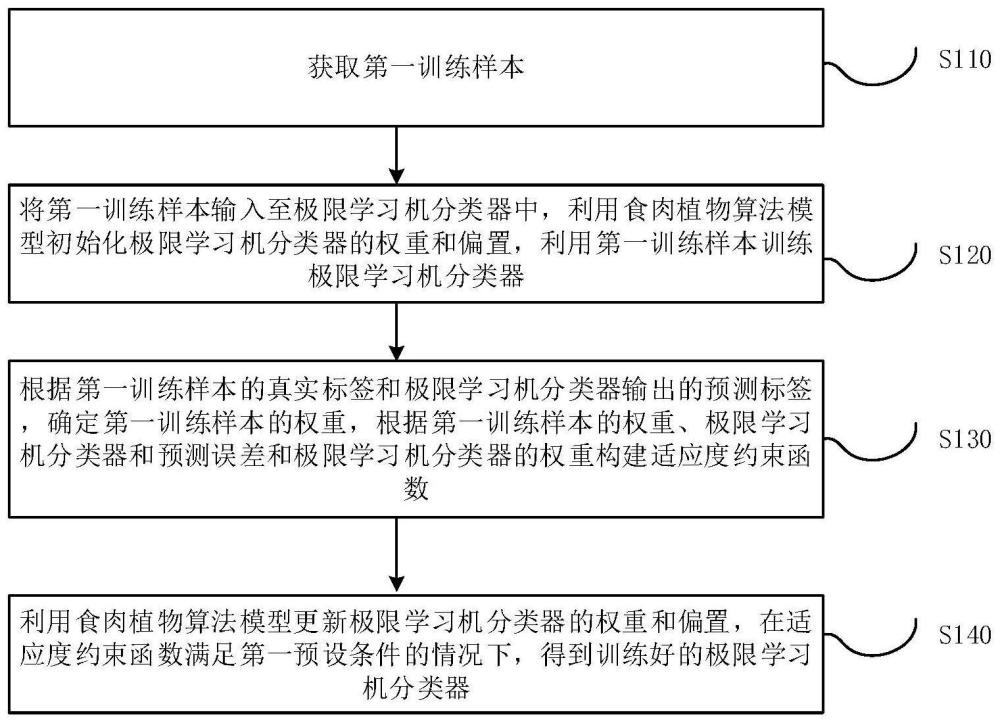
3、獲取第一訓練樣本;
4、將第一訓練樣本輸入至極限學習機分類器中,利用食肉植物算法模型初始化極限學習機分類器的權重和偏置,利用第一訓練樣本訓練極限學習機分類器;
5、根據第一訓練樣本的真實標簽和極限學習機分類器輸出的預測標簽,確定第一訓練樣本的權重,根據第一訓練樣本的權重、極限學習機分類器和預測誤差和極限學習機分類器的權重構建適應度約束函數;
6、利用食肉植物算法模型更新極限學習機分類器的權重和偏置,在適應度約束函數滿足第一預設條件的情況下,得到訓練好的極限學習機分類器。
7、在一個可能實現的實施例中,在獲取第一訓練樣本之后,方法還包括:
8、基于黎曼自編碼網絡模型,利用自編碼器對第一訓練樣本進行編碼,得到量子態訓練樣本,并利用解碼器對量子態訓練樣本進行解碼,得到第二訓練樣本;
9、將第二訓練樣本輸入至極限學習機分類器中,利用食肉植物算法模型初始化極限學習機分類器的權重和偏置,利用第二訓練樣本訓練極限學習機分類器;
10、根據第二訓練樣本的真實標簽和極限學習機分類器輸出的預測標簽,確定第二訓練樣本的權重,根據第二訓練樣本的權重、極限學習機分類器和預測誤差和極限學習機分類器的權重構建適應度約束函數;
11、利用食肉植物算法模型更新極限學習機分類器的權重和偏置,在適應度約束函數滿足預設條件的情況下,得到訓練好的目標極限學習機分類器。
12、在一個可能實現的實施例中,還包括:
13、在得到多個訓練好的目標極限學習機分類器的情況下,分別比較多個訓練好的目標極限學習機分類器輸出的預測標簽和第二訓練樣本的真實標簽,得到多個訓練好的目標極限學習機分類器的準確率;
14、根據準確率與分數的關系信息和多個訓練好的目標極限學習機分類器的準確率,確定多個訓練好的目標極限學習機分類器的分數;
15、對分數進行歸一化,得到多個訓練好的目標極限學習機分類器的目標分數,并將目標分數分別作為多個訓練好的目標極限學習機分類器的預測權重;
16、根據多個訓練好的目標極限學習機分類器的預測權重和預測標簽,確定電網故障預測模型。
17、在一個可能實現的實施例中,在基于黎曼自編碼網絡模型,利用自編碼器對第一訓練樣本進行編碼,得到量子態訓練樣本,并利用解碼器對量子態訓練樣本進行解碼,得到第二訓練樣本之前,方法還包括:
18、獲取初始黎曼自編碼網絡模型和初始正定矩陣;
19、基于初始黎曼自編碼網絡模型,利用自編碼器將第一訓練樣本映射到量子態,得到初始量子態訓練樣本;
20、根據初始量子態訓練樣本的參數,確定第一損失函數;
21、根據初始正定矩陣和任意兩個第二訓練樣本之差,確定第二損失函數;
22、基于初始黎曼自編碼網絡模型,利用解碼器對初始量子態訓練樣本進行解碼,得到初始第二訓練樣本;
23、根據第一訓練樣本和初始第二訓練樣本的距離,確定第三損失函數;
24、根據第一損失函數、第二損失函數和第三損失函數,確定初始黎曼自編碼網絡模型的編碼損失函數;
25、基于編碼損失函數更新初始黎曼自編碼網絡模型,并更新初始正定矩陣,在編碼損失函數滿足第二預設條件的情況下,得到黎曼自編碼網絡模型。
26、在一個可能實現的實施例中,在獲取第一訓練樣本之前,方法還包括:
27、獲取目標原始樣本;
28、利用訓練好的生成對抗網絡生成目標原始樣本對應的目標擴充樣本;
29、利用目標原始樣本和目標擴充樣本構建第一訓練樣本。
30、在一個可能實現的實施例中,在獲取目標原始樣本之前,方法還包括:
31、獲取第一原始樣本;
32、對第一原始樣本進行歸一化,得到第二原始樣本;
33、對第二原始樣本中的缺失值進行補充,得到第三原始樣本;
34、利用滑動窗口,對第三原始樣本去噪聲,得到目標原始樣本。
35、在一個可能實現的實施例中,在利用訓練好的生成對抗網絡生成目標原始樣本對應的目標擴充樣本之前,方法還包括:
36、獲取生成對抗網絡;
37、利用生成對抗網絡的生成器,按照隨機噪聲、目標原始樣本和第k個擴充樣本生成第k+1個擴充樣本,并構建生成對抗網絡的迭代損失函數,迭代損失函數包括損失值、目標原始樣本、第k+1個擴充樣本、動態上下文向量、和第k+1個擴充樣本的熵的關系信息,其中,k正整數;
38、基于迭代損失函數,利用生成對抗網絡的判別器將第k+1個擴充樣本與目標原始樣本進行對抗學習,迭代訓練生成對抗網絡;
39、獲取生成對抗網絡的第一模型參數,將第一模型參數輸入至火蟻算法模型,利用火蟻算法模型更新第一模型參數;
40、利用更新后的第一模型參數更新生成對抗網絡,在迭代損失函數滿足第三預設條件的情況下,得到訓練好的生成對抗網絡。
41、在一個可能實現的實施例中,在構建生成對抗網絡的迭代損失函數之前,方法還包括:
42、從目標原始樣本中,選取間隔預設時長的多個樣本點,作為間隔時序樣本;
43、將間隔時序樣本輸入至循環神經網絡中,利用循環神經網絡,確定動態上下文向量;
44、獲取第k+1個擴充樣本和目標原始樣本屬于同一分布的概率;
45、根據概率,確定第k+1個擴充樣本的熵。
46、在一個可能實現的實施例中,生成對抗網絡包括學習率,方法還包括:
47、根據第i輪更新的生成對抗網絡和第i+1輪更新的生成對抗網絡的迭代損失函數中損失值的變化量和第i輪更新的生成對抗網絡的學習率,確定第i+1輪的生成對抗網絡的學習率。
48、第二方面,本技術實施例提供了一種模型的訓練裝置,包括:
49、獲取模塊,用于獲取第一訓練樣本;
50、訓練模塊,用于將第一訓練樣本輸入至極限學習機分類器中,利用食肉植物算法模型初始化極限學習機分類器的權重和偏置,利用第一訓練樣本訓練極限學習機分類器;
51、構建模塊,用于根據第一訓練樣本的真實標簽和極限學習機分類器輸出的預測標簽,確定第一訓練樣本的權重,根據第一訓練樣本的權重、極限學習機分類器和預測誤差和極限學習機分類器的權重構建適應度約束函數;
52、確定模塊,用于利用食肉植物算法模型更新極限學習機分類器的權重和偏置,在適應度約束函數滿足第一預設條件的情況下,得到訓練好的極限學習機分類器。
53、第三方面,本技術實施例提供了一種電子設備,設備包括:
54、處理器以及存儲有計算機程序指令的存儲器;
55、處理器執行計算機程序指令時實現上述任意一項的在模型的訓練方法。
56、第四方面,本技術實施例提供了一種計算機存儲介質,計算機可讀存儲介質上存儲有計算機程序指令,計算機程序指令被處理器執行時實現上述任意一項的模型的訓練方法。
57、第五方面,本技術實施例提供了一種計算機程序產品,其特征在于,計算機程序產品中的指令由電子設備的處理器執行時,使得電子設備能夠執行上述任意一項的模型的訓練方法。
58、本技術實施例的模型的訓練方法、裝置、設備及計算機存儲介質,該方法包括:獲取第一訓練樣本;將第一訓練樣本輸入至極限學習機分類器中,利用食肉植物算法模型初始化極限學習機分類器的權重和偏置,利用第一訓練樣本訓練極限學習機分類器;根據第一訓練樣本的真實標簽和極限學習機分類器輸出的預測標簽,確定第一訓練樣本的權重,根據第一訓練樣本的權重、極限學習機分類器和預測誤差和極限學習機分類器的權重構建適應度約束函數;利用食肉植物算法模型更新極限學習機分類器的權重和偏置,在適應度約束函數滿足第一預設條件的情況下,得到訓練好的極限學習機分類器。如此,基于食肉植物算法模型更新極限學習機分類器的權重和偏置,不僅提高了訓練速度,還優化了極限學習機分類器的泛化能力,減少了局部最優問題的風險。
- 還沒有人留言評論。精彩留言會獲得點贊!