一種DOS攻擊下的周期分段系統的事件觸發控制方法
本發明涉及網絡化控制領域,更具體地,涉及一種dos攻擊下的周期分段系統的事件觸發控制方法。
背景技術:
1、周期性,作為一種客觀規律,廣泛存在于自然界與工程實踐中。周期分段系統,作為一種控制系統,可以在連續時間內近似周期性這一客觀規律,進而使得周期性的規律可以被應用于工程應用中。周期分段系統由若干個子系統組成,每個子系統的駐留時間和切換順序固定,可視為一種切換率固定的特殊切換系統。
2、隨著網絡技術的發展,為了降低布線的復雜度、提升系統的可靠性,工業界的控制系統漸漸向網絡化方向發展。在網絡化的過程中,由于周期分段系統具有切換特性,網絡中常見的dos攻擊會造成系統狀態測量信號、切換信號以及控制信號的傳輸失敗,從而破壞正常控制邏輯的實現和產生異步控制問題,導致系統性能下降,甚至不穩定。
3、現有技術公開了一種步進電機位置閉環控制系統及方法,該方法使用梯形分段控制和分段位置式pid控制;針對不同情況下運動的特點,通過動態參數來修改控制策略。該方法通過目標細分數的補償克服了外部原因引起的控制周期時間不確定的問題,但并未考慮到dos攻擊對于控制系統的影響。
技術實現思路
1、本發明針對現有技術的周期分段系統無法應對dos攻擊的缺陷,提供了一種dos攻擊下的周期分段系統的事件觸發控制方法。
2、本發明的首要目的是為解決上述技術問題,本發明的技術方案如下:
3、一種dos攻擊下的周期分段系統的事件觸發控制方法,包括:
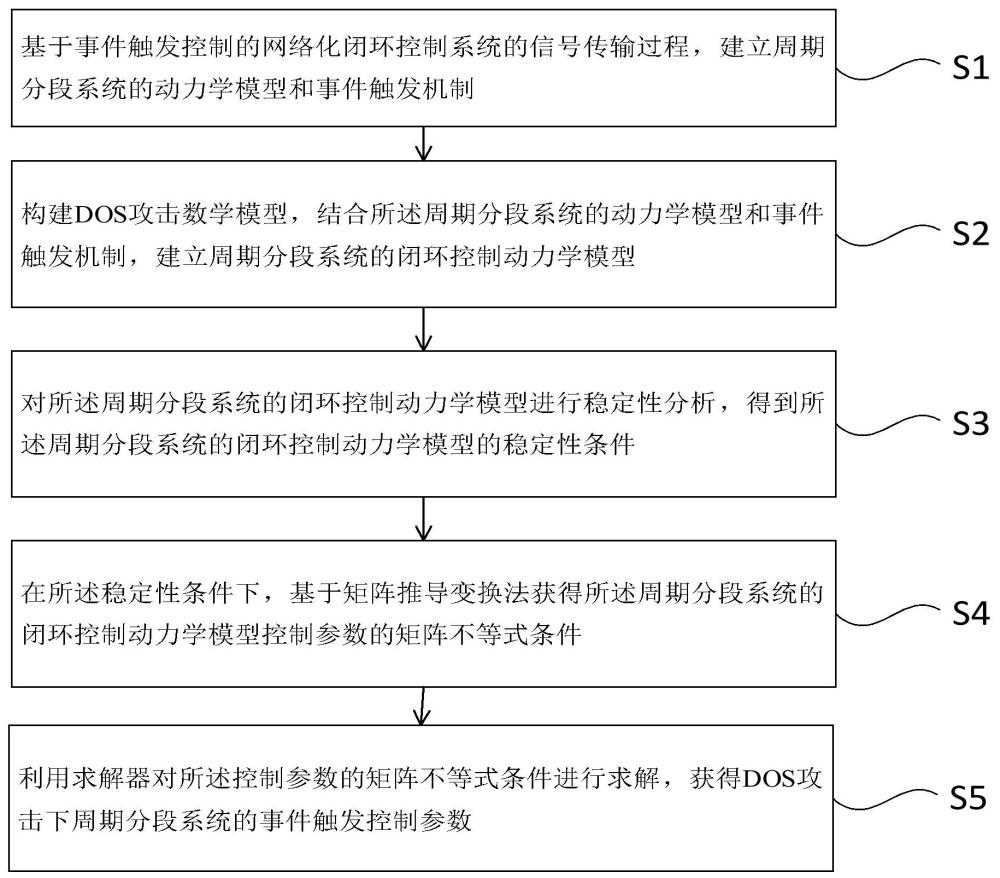
4、s1:基于事件觸發控制的網絡化閉環控制系統的信號傳輸過程,建立周期分段系統的動力學模型和事件觸發機制;
5、s2:構建dos攻擊數學模型,結合所述周期分段系統的動力學模型和事件觸發機制,建立周期分段系統的閉環控制動力學模型;
6、s3:對所述周期分段系統的閉環控制動力學模型進行穩定性分析,得到所述周期分段系統的閉環控制動力學模型的穩定性條件;
7、s4:在所述穩定性條件下,基于矩陣推導變換法獲得所述周期分段系統的閉環控制動力學模型控制參數的矩陣不等式條件;
8、s5:利用求解器對所述控制參數的矩陣不等式條件進行求解,獲得dos攻擊下周期分段系統的事件觸發控制參數。
9、進一步地,所述網絡化閉環控制系統包括:控制單元、傳感單元;
10、所述控制單元包括被控對象、控制器和零階保持器;所述傳感單元包括傳感器和事件觸發器;
11、所述傳感單元發送切換指令和周期分段系統狀態向量到控制單元,控制器發送控制輸入向量到被控對象。
12、進一步地,所述周期分段系統由若干個子系統組成;每個子系統分別對應一種模態;
13、所述周期分段系統動力學模型的狀態空間表達式如下:
14、
15、其中,為周期分段系統狀態向量,為控制輸入向量,為周期分段系統狀態向量導數,為周期分段系統的當前時刻,表示子系統的模態,、表示周期分段系統的第個子系統的系統參數。
16、進一步地,所述dos攻擊數學模型如下:
17、同一次dos攻擊開始和結束之間的時間記為一次dos攻擊過程;
18、時間區間中dos攻擊發生的時間集合:
19、
20、時間區間中dos攻擊不發生的時間集合:
21、
22、第n次dos攻擊過程中dos攻擊發生的時間區間:
23、
24、第n次dos攻擊過程中dos攻擊不發生的時間區間:
25、
26、其中,為第n次dos攻擊過程中dos攻擊的持續時間,為第n次dos攻擊過程中dos攻擊發生的時刻。
27、進一步地,所述事件觸發機制如下:
28、當dos攻擊不發生時,第k+1個采樣時刻如下:
29、
30、當dos攻擊發生時,第k+1個采樣時刻如下:
31、
32、其中,為周期分段系統的當前時刻;為采樣誤差,為第個子系統的事件觸發標量常數,、為第個子系統的事件觸發矩陣,為常數,為dos攻擊下的采樣間隔。
33、進一步地,所述控制輸入向量表達式如下:
34、
35、其中,為周期分段系統采樣的狀態向量,為第k個采樣時刻,為周期序號,為一個周期的總駐留時間,為第個周期到第個周期中dos攻擊不發生的時間集合,為第個周期到第個周期中dos攻擊發生的時間集合,為時變控制增益,為切換指令。
36、進一步地,所述周期分段系統的閉環控制動力學模型分為三種狀態;
37、所述周期分段系統的閉環控制動力學模型如下:
38、同步控制狀態下的周期分段系統的閉環控制動力學模型:
39、
40、異步控制狀態下的周期分段系統的閉環控制動力學模型:
41、
42、dos攻擊狀態下的周期分段系統的閉環控制動力學模型:
43、
44、其中,為采樣誤差,為周期分段系統狀態向量,為周期分段系統狀態向量導數,、表示周期分段系統的第個子系統的系統參數,為同步控制矩陣,;為異步控制矩陣,;為第i個子系統的控制增益。
45、進一步地,所述周期分段系統的閉環控制動力學模型的穩定性條件為:
46、
47、
48、
49、
50、
51、
52、
53、
54、其中,,,分別表示第i個子系統的同步控制狀態、異步控制狀態、dos攻擊狀態的衰減率;,,分別為第i個子系統的同步控制狀態、異步控制狀態、dos攻擊狀態的衰減率的最小值;、為dos攻擊參數,為dos攻擊下的采樣間隔,為切換指令的傳輸間隔,為正的常數,為第i個子系統的李雅普諾夫時變矩陣,、表示周期分段系統的第個子系統的系統參數,為第i個子系統的控制增益,為同步控制矩陣,,為異步控制矩陣,,為一個周期的總駐留時間,為第i個子系統的駐留時間,為第個子系統的事件觸發標量常數,、為第個子系統的事件觸發矩陣。
55、進一步地,所述周期分段系統的事件觸發控制參數包括:控制增益;
56、所述第i個子系統的控制增益如下:
57、
58、
59、
60、其中,、為第i個子系統的時變矩陣多項式,、分別為、的線性插值后表達式,為周期分段系統的當前時刻,為周期序號,為第i個子系統的駐留時間,為一個周期的總駐留時間。
61、進一步地,所述周期分段系統的閉環控制動力學模型控制參數的矩陣不等式條件如下:
62、
63、
64、
65、
66、
67、
68、
69、
70、其中,,,分別表示第i個子系統的同步控制狀態、異步控制狀態、dos攻擊狀態的衰減率;,,分別為第i個子系統的同步控制狀態、異步控制狀態、dos攻擊狀態的衰減率的最小值;、為dos攻擊參數,為dos攻擊下的采樣間隔,為切換指令的傳輸間隔,為正的常數,、表示周期分段系統的第個子系統的系統參數,為第i個子系統的控制增益,為一個周期的總駐留時間,為第i個子系統的駐留時間,為第個子系統的事件觸發標量常數,、為第個子系統的事件觸發矩陣,、為事件觸發代數矩陣,,,、為第i個子系統的時變矩陣多項式,為的線性插值后表達式。
71、與現有技術相比,本發明的有益效果是:
72、本發明通過建立周期分段系統的動力學模型,使得周期分段系統的分析更方便;通過構建dos攻擊數學模型,將dos攻擊量化,從而便于分析dos攻擊強度;通過建立事件觸發機制,減少了不必要的采樣,節約網絡資源;通過構建周期分段系統的閉環控制動力學模型,進而實現動態描述閉環控制系統,從而便于求解器求解控制參數。最終求得的控制參數應用于周期分段系統,使得周期分段系統可以抵御一定強度的dos攻擊。
- 還沒有人留言評論。精彩留言會獲得點贊!