一種自動化移動裝置、方法、設備及存儲介質與流程
本技術涉及計算機,尤其涉及車輛測試和標定,具體涉及一種自動化移動裝置、方法、設備及存儲介質。
背景技術:
1、在車輛測試、標定過程中,有許多需要移動障礙物位置的場景,例如:超聲波雷達的性能測試、標定,車輛攝像頭環視和周視的標定,激光雷達的標定等。在這些測試和標定過程中,需要對障礙物的位置進行多次變動。例如:在超聲波雷達的性能測試中需要移動障礙物幾百上千次。傳統的車輛測試過程中,人工移動障礙物進行性能測試,但是,人工移動障礙物的位置,無法控制障礙物的擺放精度,并且浪費人力資源,效率較低。因此,如何提高車輛測試過程中障礙物的移動效率和精度是目前亟待解決的技術問題。
技術實現思路
1、本技術提供一種自動化移動裝置、方法、設備及存儲介質,以至少解決相關技術中車輛測試過程中障礙物的移動效率和精度較低的技術問題。本技術的技術方案如下:
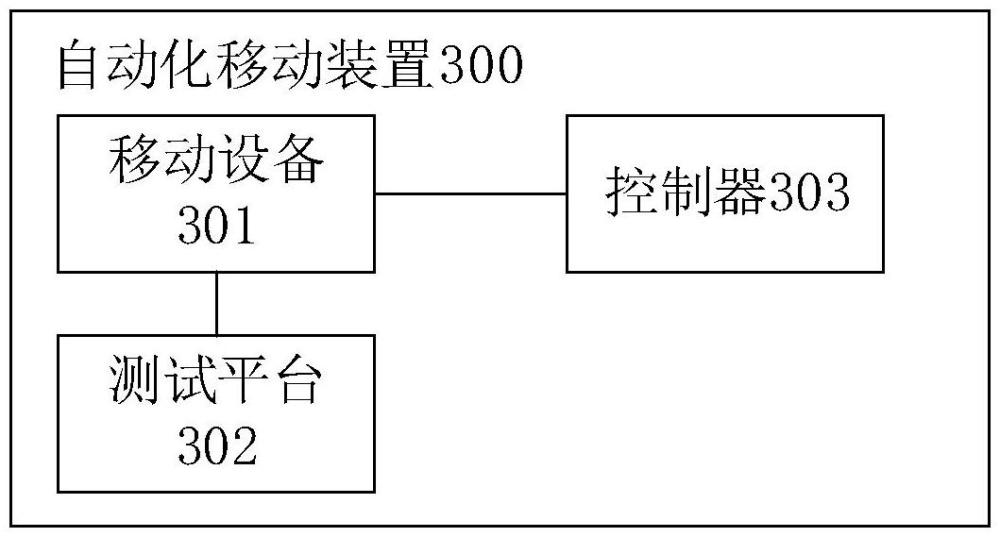
2、根據本技術涉及的第一方面,提供一種自動化移動裝置,該自動化移動裝置包括:移動設備、測試平臺和控制器;移動設備用于承載目標物體并在測試平臺上移動;測試平臺用于承載移動設備;控制器用于向移動設備發送控制指令;控制指令用于指示移動設備在測試平臺上移動;測試平臺包括多條滑軌;移動設備包括驅動輪;驅動輪用于基于控制指令驅動移動設備在多條滑軌上移動。
3、根據上述技術手段,自動化移動裝置可以通過控制器控制移動設備攜帶目標物體在測試平臺上運動,并且控制器還可以接收遠程控制指令,控制移動設備攜帶目標物體在測試平臺上運行,從而實現了遠程操控目標物體在測試平臺上運動,以便在將目標物體作為障礙物,對車輛進行性能測試和標定時,通過控制器控制目標物體的移動,提高了目標物體的擺放精度,并且,與傳統的目標物體的移動方式相比,降低了車輛測試和標定的時間成本和人力資源成本,提高車輛測試和標定的工作效率。
4、在一種可能的實施方式中,多條滑軌在測試平臺上呈網格狀分布。
5、根據上述技術手段,測試平臺上網格狀分布的滑軌,使得移動設備可以在測試平臺上進行多方向的移動和調整,從而移動設備可以在測試平臺上移動至任意位置,提高了移動設備和目標物體移動的靈活性。
6、在另一種可能的實施方式中,測試平臺還包括多個圓柱形凹槽;多個圓柱形凹槽設置于多條滑軌的交叉處;圓柱形凹槽用于定位和固定移動設備。
7、根據上述技術手段,測試平臺上的圓柱形凹槽可以為移動設備提供精確的定位點,確保移動設備和目標物體在測試平臺的滑軌上移動的準確性,并且,在移動設備移動至目標位置后,圓柱形凹槽還可以固定移動設備在目標位置上,避免了移動設備和目標物體發生滑動或者偏移,提高了移動設備和目標物體移動的準確性。
8、在又一種可能的實施方式中,圓柱形凹槽內部包括一個升降平臺;升降平臺用于固定移動設備;升降平臺包括:彈簧、第一步進電機、第一驅動桿、支撐板、承載平臺;彈簧分別與圓柱形凹槽的內部下壁和支撐板的底部連接;第一步進電機位于圓柱形凹槽的下方,用于控制第一驅動桿上下移動;圓柱形凹槽的底部中心包括一個通孔;第一驅動桿的一端通過通孔與第一步進電機連接,第一驅動桿的另一端與支撐板的底部連接;承載平臺位于支撐板上部;承載平臺用于承載移動設備。
9、根據上述技術手段,在移動設備需要在圓柱形凹槽內固定時,通過第一驅動桿和第一步進電機將承載平臺下降至最低點,使得移動設備和攜帶的目標物體固定在圓柱形凹槽內,避免移動設備和攜帶的目標物體發生滑動或者偏移。并且,在移動設備需要進行移動時,將承載平臺上升至最高點,使得移動設備可以在測試平臺的多條滑軌上移動。
10、在又一種可能的實施方式中,驅動輪為麥克納姆輪;驅動輪均勻分布在移動設備的底座;麥克納姆輪包括第二步進電機;第二步進電機用于驅動麥克納姆輪帶動移動設備在測試平臺上移動。
11、根據上述技術手段,通過多個麥克納姆輪,移動設備可以在測試平臺上進行360度全方位的移動,例如:前進、后退、橫向移動和原地旋轉等,提高了移動設備的靈活性。
12、在又一種可能的實施方式中,移動設備還包括:穩定設備;穩定設備設置于移動設備的底座的上面;穩定設備包括:第三步進電機、多個第二驅動桿以及與多個緩沖層;多個緩沖層分別設置于多個第二驅動桿的桿端;第三步進電機用于控制多個第二驅動桿伸縮;穩定設備用于將移動設備固定在圓柱形凹槽中。
13、根據上述技術手段,穩定設備可以通過伸縮多個第二驅動桿和緩沖層,調整移動設備與圓柱形凹槽的接觸,將移動設備固定在測試平臺的圓柱形凹槽內,從而提高了移動設備的穩定性。
14、在又一種可能的實施方式中,移動設備還包括:支持桿和支持板;支持桿與支持板連接;支持桿設置于穩定設備上部;支持板用于承載目標物體。
15、根據上述技術手段,通過支持桿和支撐板,移動設備可以承載目標物體在測試平臺上移動,從而可以實現目標物體在測試平臺上的移動,以便將目標物體作為障礙物,對車輛的性能進行測試和標定,提高工作效率。
16、根據本技術提供的第二方面,提供一種自動化移動方法,應用于自動化移動裝置;自動化移動裝置包括:移動設備和測試平臺;移動設備用于承載目標物體并在測試平臺上移動;測試平臺用于承載移動設備。該方法包括:接收控制終端的控制指令;控制指令用于指示將移動設備移動至測試平臺的目標位置;向移動設備發送控制指令。
17、在一種可能的實施方式中,測試平臺包括多個圓柱形凹槽;目標位置為測試平臺上的目標圓柱形凹槽;圓柱形凹槽包括升降平臺;移動設備包括穩定設備;穩定設備包括多個第二驅動桿。上述方法還包括:在移動設備位于測試平臺的目標圓柱形凹槽內的情況下,向測試平臺發送第一控制信號;第一控制信號用于指示下降目標圓柱形凹槽的升降平臺;接受測試平臺發送的第一反饋信號;第一反饋信號用于指示目標圓柱形凹槽的升降平臺已下降;向移動設備發送第二控制信號;第二控制信號用于指示控制穩定設備的多個第二驅動桿向外伸長,將移動設備固定在目標圓柱形凹槽內;接收移動設備發送的第二反饋信號;第二反饋信號用于指示移動設備已被固定在目標圓柱形凹槽內。
18、根據本技術提供的第三方面,提供一種電子設備,包括:處理器;用于存儲處理器可執行指令的存儲器;其中,處理器被配置為執行指令,以實現上述第二方面及其任一種可能的實施方式的方法。
19、根據本技術提供的第四方面,提供一種計算機可讀存儲介質,當計算機可讀存儲介質中的指令由電子設備的處理器執行時,使得電子設備能夠執行上述第二方面中及其任一種可能的實施方式的方法。
20、根據本技術提供的第五方面,提供一種計算機程序產品,計算機程序產品包括計算機指令,當計算機指令在電子設備上運行時,使得電子設備執行上述第二方面及其任一種可能的實施方式的方法。
21、由此,本技術的上述技術特征具有以下有益效果:
22、(1)自動化移動裝置可以通過控制器控制移動設備攜帶目標物體在測試平臺上運動,并且控制器還可以接收遠程控制指令,控制移動設備攜帶目標物體在測試平臺上運行,從而實現了遠程操控目標物體在測試平臺上運動,以便在將目標物體作為障礙物,對車輛進行性能測試和標定時,通過控制器控制目標物體的移動,提高了目標物體的擺放精度,并且,與傳統的目標物體的移動方式相比,降低了車輛測試和標定的時間成本和人力資源成本,提高車輛測試和標定的工作效率。
23、(2)測試平臺上網格狀分布的滑軌,使得移動設備可以在測試平臺上進行多方向的移動和調整,從而移動設備可以在測試平臺上移動至任意位置,提高了移動設備和目標物體移動的靈活性。
24、(3)測試平臺上的圓柱形凹槽可以為移動設備提供精確的定位點,確保移動設備和目標物體在測試平臺的滑軌上移動的準確性,并且,在移動設備移動至目標位置后,圓柱形凹槽還可以固定移動設備在目標位置上,避免了移動設備和目標物體發生滑動或者偏移,提高了移動設備和目標物體移動的準確性。
25、(4)在移動設備需要在圓柱形凹槽內固定時,通過第一驅動桿和第一步進電機將承載平臺下降至最低點,使得移動設備和攜帶的目標物體固定在圓柱形凹槽內,避免移動設備和攜帶的目標物體發生滑動或者偏移。并且,在移動設備需要進行移動時,將承載平臺上升至最高點,使得移動設備可以在測試平臺的多條滑軌上移動。
26、(5)通過多個麥克納姆輪,移動設備可以在測試平臺上進行360度全方位的移動,例如:前進、后退、橫向移動和原地旋轉等,提高了移動設備的靈活性。
27、(6)穩定設備可以通過伸縮多個第二驅動桿和緩沖層,調整移動設備與圓柱形凹槽的接觸,將移動設備固定在測試平臺的圓柱形凹槽內,從而提高了移動設備的穩定性。
28、(7)通過支持桿和支撐板,移動設備可以承載目標物體在測試平臺上移動,從而可以實現目標物體在測試平臺上的移動,以便將目標物體作為障礙物,對車輛的性能進行測試和標定,提高工作效率。
29、需要說明的是,第二方面至第五方面中的任一種實現方式所帶來的技術效果可參見第一方面中對應實現方式所帶來的技術效果,此處不再贅述。
30、應當理解的是,以上的一般描述和后文的細節描述僅是示例性和解釋性的,并不能限制本技術。
- 還沒有人留言評論。精彩留言會獲得點贊!