一種模擬真實地形的無人機集群半實物仿真控制系統
本發明主要涉及到無人機仿真控制,特指一種模擬真實地形的無人機集群半實物仿真控制系統。
背景技術:
1、隨著無人機技術的迅猛發展,其在多個領域的應用日益廣泛,包括但不限于偵查搜索、航拍攝影、農林監測及物流配送。特別是無人機集群編隊協同技術的興起,為提升作業效率、擴大任務覆蓋范圍以及優化資源利用提供了前所未有的機遇。該技術通過多架無人機的智能協同,實現了超越單一無人機性能總和的作業能力,展現出1+1>2的顯著優勢。然而,在實際部署前,確保這些集群系統的穩定性和高效性,依賴于精確且貼近實際應用的仿真驗證。
2、當前,無人機集群協同控制系統的研發主要依托兩類仿真手段:一是基于純軟件的仿真環境,二是結合硬件的半實物仿真系統。前者利用高級物理引擎實現較為真實的動態模擬,而后者則側重于通過實體硬件與虛擬環境的結合,驗證飛行動力學算法的實際表現。盡管這些方法在一定程度上促進了算法的迭代優化,但仍存在若干關鍵限制:
3、1、場景真實性不足:多數仿真驗證局限于軟件層面,即便采用含真實物理引擎的環境,也難以全面反映復雜地形對無人機集群飛行的影響。對于半實物仿真,普遍采用的地面站監控或二維示景評估,無法充分展現三維空間中的無人機集群動態,導致仿真相對于實景的還原度不高。
4、2、觀察與評估局限性:在三維無人機集群任務仿真中,二維示景模塊的使用限制了對無人機飛行姿態的全面觀察,難以精確評估編隊飛行的精確度與協同效果,影響了對算法性能的準確判斷。
5、3、從仿真到實物的過渡障礙:由于仿真環境與實際地理環境之間的差異,現有仿真技術在驗證過程中可能忽視了特定地形對集群協同任務的約束條件,導致算法在實物驗證階段面臨未預見的問題,增加了從仿真到實際應用的難度。
技術實現思路
1、本發明要解決的技術問題就在于:針對現有技術存在的技術問題,本發明提供一種仿真準確率高、可視化效果好、適用范圍廣的模擬真實地形的無人機集群半實物仿真控制系統。
2、為解決上述技術問題,本發明提出的技術方案為:
3、一種模擬真實地形的無人機集群半實物仿真控制系統,其包括:
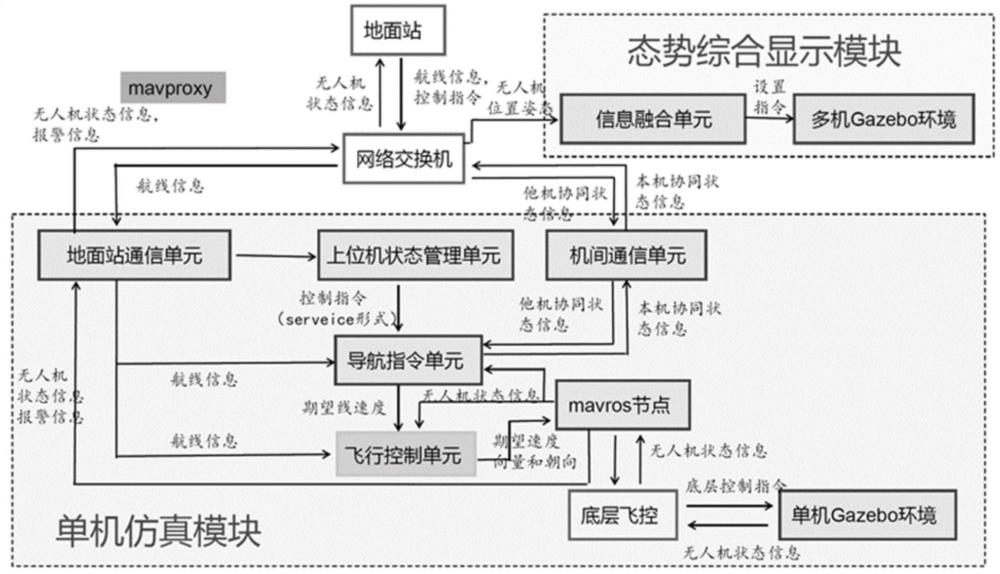
4、單機仿真模塊,包括多架仿真無人機以及與所述多架仿真無人機一一對應的多個機載上位機和多個機載自駕儀,所述機載自駕儀用于接收所述底層控制指令、無人機狀態信息,并發送無人機基本信息;
5、網絡交換機,用來接收來自所述仿真無人機的狀態信息、報警信息和協同狀態信息,并將獲得的信息分別發送給地面站和態勢綜合顯示模塊;
6、地面站,用于接收并顯示無人機的狀態信息,并且根據任務執行態勢接收航線信息和控制指令;
7、態勢綜合顯示模塊,包含信息融合單元和多機gazebo環境單元,所述信息融合單元用于集成所有在單機仿真模塊中運行的無人機信息,用以實現仿真環境動畫演示,所述多機gazebo環境單元作為可視化示景單元嵌入高保真任務執行環境用于直觀顯示所述仿真無人機集群的整體態勢。
8、作為本發明的進一步優化,所述機載上位機包括地面站通信單元、機間通信單元、飛行控制單元、導航指令單元和上位機狀態管理單元;
9、所述地面站用于實現上位機與外部設備的交互;所述地面站包括地面通信單元,所述地面站通信單元用來讀取外部設備傳遞的協議信號,轉化為ros的話題形式,供其他節點訂閱;或者訂閱其他節點的消息,發送給外部設備;
10、所述機間通信單元用于處理無人機機間交互信息,完成無人機的機間通信;
11、所述飛行控制單元用來從所述導航指令單元節點接收到上層導航信息后,計算出前往該導航目標點的具體速度矢量和朝向控制量,提供仿真底層控制指令;
12、所述導航指令單元基于航線、自身位置、以及機間信息,根據所述飛行控制單元的指令,計算出導航信息;
13、所述上位機狀態管理單元用來從所述地面站通信單元接收地面站指令,改變所述導航指令單元的任務狀態。
14、作為本發明的進一步優化,所述多機gazebo環境單元中利用衛星地圖構建高保真地形的模型,其步驟包括:
15、步驟s01:構建無人機集群控制算法的任務想定,確定真實飛行場景的地理位置,準備仿真飛行場景所需的衛星地圖、地形紋理數據;
16、步驟s02:將所述矢量數據導入blender三維建模軟件,為所述矢量數據賦予特定信息,在blender中構建出地理模型,并將構建出地理模型導出為dae模型文件;
17、步驟s03:根據所述dae模型文件創建gazebo模型文件,以得到高保真地形模型。
18、作為本發明的進一步優化,所述步驟s01中,通過qgis開源的地理信息系統獲取地形的影像、紋理、模型、衛星地圖數據集,并將獲得的數據集轉化為矢量數據。
19、作為本發明的進一步優化,所述步驟s01中,所述衛星地圖為地形灰度圖,所述地形灰度圖為柵格化圖像,包含地標高程信息,用來創建高保真的地形模型。
20、作為本發明的進一步優化,所述步驟s02中,包括對所述灰度圖進行預處理,包括:
21、調整所述灰度圖的圖像高度和寬度,以使圖像高度和寬度相等;
22、調整所述灰度圖的圖像像素為(2n+1)*?(2n+1),n=1,2,3,…;
23、調整所述灰度圖的圖像為8位圖像(uint8)。
24、作為本發明的進一步優化,所述步驟s02包括:
25、步驟s201:在blender軟件中創建平面,對平面創建細分修改器和替代修改器,并綁定灰度數據,生成地形曲面;
26、步驟s202:修改材質屬性為基于顏色后,導入衛星地圖等紋理數據;
27、步驟s203:渲染得到高保真的地形環境,以得到地理模型。
28、作為本發明的進一步優化,所述步驟s03中,創建gazebo模型文件,在gazebo的現有模型中復制地面ground_plane模型進行修改,所述修改包括修改模型描述文件model.config,將模型元信息修改為適合自定義模型的信息;修改模型定義文件model.sdf,添加灰度圖的<url>和<size>;調節模型最高點處的海拔高度;指定模型渲染材質的<url>,調整渲染高度范圍,得到最終的期望地形模型。
29、作為本發明的進一步優化,所述步驟s03包括:
30、步驟s301:獲取合適的dae模型文件后,在gazebo中導入并構建模型,修改模型描述文件model.config,將模型元信息修改為適合自定義模型的信息;
31、步驟s302:修改模型定義文件model.sdf,改為按照dae自帶材質著色,重新在gazebo中打開模型,以得到渲染后的高保真地形環境。
32、作為本發明的進一步優化,在構建的高保真模型文件嵌入多機gazebo示景模塊,用來實現在半實物仿真的過程中實時顯示任務環境以及執行進度,進行可視化調試。
33、與現有技術相比,本發明的優點在于:
34、1、本發明的模擬真實地形的無人機集群半實物仿真控制系統,仿真準確率高、可視化效果好、適用范圍廣,本發明所創建的無人機仿真飛行場景與實際飛行場景基本一致,且可以添加任意的衛星地圖數據,解決了常規半實物無人機集群仿真系統可視化效果差、二維任務示景界面難以真實有效反應無人機姿態和任務執行情況的問題。
35、2、本發明模擬真實地形的無人機集群半實物仿真控制系統,充分利用開源的地理數據信息生產對應的地形網格文件,通過對gazebo模型參數的合理配置,生產與實際飛行場景基本一致且加載時間較快的超大地形場景。
36、3、本發明的模擬真實地形的無人機集群半實物仿真控制系統,充分利用了開源的地理數據信息生產對應的地形網格文件,通過對gazebo模型參數的合理配置,生產與實際飛行場景基本一致且加載時間較快的超大地形場景。根據實際地形環境數據生成高保真的仿真地形場景,其不僅可以使無人機的飛行的物理效果更加真實,而且還可以根據實際任務需要將地形導入仿真環境中,直觀顯示所述仿真無人機集群的整體態勢,后續基于復雜任務環境優化的算法能夠更加貼合實機飛行需要,從而更全面的評估半實物仿真任務的執行效果。
- 還沒有人留言評論。精彩留言會獲得點贊!