一種電動牙刷伺服系統控制方法與流程
本發明屬于電動牙刷控制領域,具體涉及一種電動牙刷伺服系統控制方法。
背景技術:
1、電動牙刷按其工作原理可以分成旋轉式電動牙刷和聲波式電動牙刷:旋轉式電動牙刷是通過牙刷主體中的電機驅動圓形刷頭旋轉,就是將傳統的手動刷牙變成了電動,增強摩擦效果,以此來提升刷牙的效率,不過旋轉類電動牙刷噪音較大,牙面清洗很干凈,牙縫清洗相對較弱,且對牙齒磨損大;聲波牙刷刷頭的振動頻率與聲波頻率一致或者相近,是通過其內部聲波電機驅動刷頭產生垂直于刷柄方向的高頻擺動,但擺動的幅度很小,通過不停的上下刷動和引起的水流沖擊完成對口腔的清潔,對牙齒的磨損較小,但清潔效果相對較弱。
2、要實現電動牙刷伺服電機的精確控制,需要實時檢測轉子磁極位置。常見的位置傳感器主要分為3大類:開關霍爾傳感器、線性霍爾傳感器及光電位置傳感器。其中,開關霍爾傳感器價格最便宜,但角度分辨率較差,需要計算霍爾邊沿跳變的間隔時間去計算轉子平均速度,以及根據不同相邊沿確定當前時刻的位置。但是,霍爾安裝偏差,位置和速度計算誤差較大,需要引入較為復雜的補償算法。光電位置傳感器價格高,角度分辨率高,且通過正交譯碼計數器和零位脈沖信號可直接獲取轉子位置和速度。但是光電位置傳感器環境適應性差,易受振動、粉塵等影響,可靠性一般。線性霍爾傳感器輸出一對正交的正、余弦模擬信號,角度分辨率較高,且價格與開關型霍爾傳感器相當。因此,電動牙刷采用線性霍爾傳感器獲得轉子位置,控制精度高,性價比高。文獻《application?ofhall?effect?sensor:a?study?on?the?influences?of?sensor?placement》(w.sriratana,r.murayama.ieeetransactions?on?industrial?electronics,2013,1-5)指出,由于元器件安裝誤差、磁場強度、轉子偏心、電磁干擾等原因,會干擾線性霍爾輸出的正弦和余弦模擬量,從而降低位置解碼精度。因此,如何處理線性霍爾輸出的信號,并精確解析出相應的角度成為當下研究熱點。常見對于線性霍爾軟件解碼有單霍爾和雙霍爾解碼,其中單霍爾是讀取線性霍爾輸出的正弦信號,再將讀到的正弦信號做反函數換算即可得到實際的電機角度。該方法優點在于運算量小,但由于只采用一路線性霍爾,這樣將會導致信號一旦受到干擾,得到的角度誤差會明顯增大,尤其是在過零點和極值點附近。雙霍爾解碼用到了正弦和余弦信號,文獻《low?costposition?sensor?for?permanent?magnet?linear?drive》(wegener?r,senicarf,junge?c,et?al.peds'07.7th?international?conference?on.ieee,2007:1367-1371.)提出了利用正余切和正余弦之間的三角函數關系,將正余弦信號經過簡單的反正切計算得到當前的角度,這種方法估計動態響應快,但是易受測量噪聲影響。
技術實現思路
1、本發明的目的在于針對解決背景技術中提出的問題,提出一種電動牙刷伺服系統控制方法。
2、為實現上述目的,本發明所采取的技術方案為:
3、本發明提出的一種電動牙刷伺服系統控制方法,應用于電動牙刷伺服系統,且電動牙刷伺服系統中電動牙刷的電機的內底部安裝有相互垂直的兩個線性霍爾傳感器,所述電動牙刷伺服系統控制方法包括:
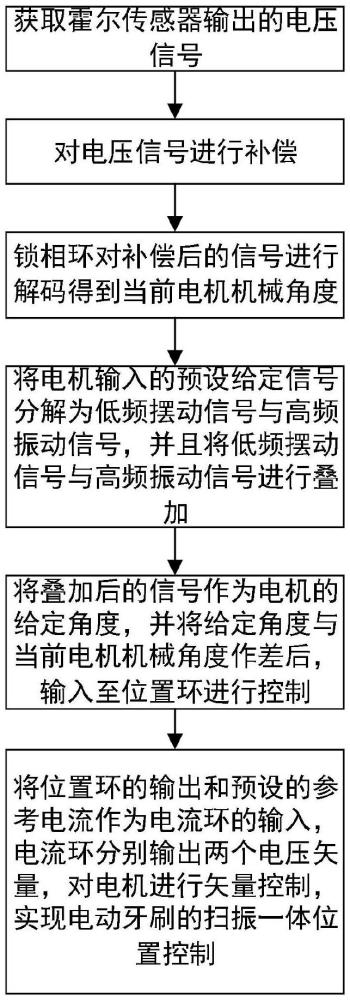
4、獲取電機轉動后線性霍爾傳感器輸出的電壓信號,且電壓信號為一對正交的正弦信號和余弦信號;
5、對正弦信號進行直流偏置補償,以及對余弦信號進行直流偏置和幅值補償;
6、通過鎖相環對補償后的信號進行解碼得到當前霍爾角度,即當前電機機械角度,通過當前電機機械角度和電機極對數相乘得到當前電機電氣角度;
7、將電機輸入的給定位置信號分解為低頻擺動信號與高頻振動信號,并且將低頻擺動信號與高頻振動信號進行疊加;
8、將疊加后的信號作為電機的給定角度,并將給定角度與當前電機機械角度作差后,輸入至位置環進行控制;
9、將位置環的輸出和預設的參考電流作為d、q軸電流環的輸入,電流環分別輸出兩個電壓矢量,然后將兩個電壓矢量結合當前電機電氣角度進行坐標變換以及空間矢量脈沖寬度調制,對電機進行矢量控制,實現電動牙刷的掃振一體位置控制。
10、優選地,所述一對正交的正弦信號和余弦信號的表達式分別為:
11、正弦信號f(θhall)sin:
12、f(θhall)sin=asinsin(θhall)+osin
13、余弦信號f(θhall)cos:
14、f(θhall)cos=acoscos(θhall)+ocos
15、其中,
16、
17、其中,θhall表示當前霍爾角度,asin和osin依次表示正弦信號的幅值和直流偏置,acos和ocos依次表示余弦信號的幅值和直流偏置,f(θhall)sinmax和f(θhall)sinmin依次表示正弦信號的最大值和最小值,f(θhall)cosmax和f(θhall)cosmin依次表示余弦信號的最大值和最小值,sin(θhall)和cos(θhall)依次表示當前霍爾角度對應的正弦值和余弦值。
18、優選地,所述對正弦信號進行直流偏置補償,以及對余弦信號進行直流偏置和幅值補償,包括:
19、以正弦信號為基準,進行補償,且補償后的正弦信號f(θhall)'sin的表達式為:
20、
21、補償后的余弦信號f(θhall)'cos的表達式為:
22、
23、優選地,所述通過鎖相環對補償后的信號進行解碼得到當前霍爾角度,即當前電機機械角度,包括:
24、將補償后的正弦信號和余弦信號作為鎖相環的輸入,鎖相環輸出估計霍爾角度,即估計電機機械角度,將估計霍爾角度作為當前霍爾角度,則估計電機機械角度作為當前電機機械角度,其中:
25、鎖相環控制過程中,補償后的正弦信號和余弦信號,以及反饋的估計霍爾角度經過鎖相環的鑒相器轉化為電信號e(θhall),且計算公式如下:
26、
27、將電信號依次通過鎖相環的環路濾波器和壓控振蕩器得到估計霍爾角度且計算公式如下:
28、
29、其中,表示積分環節,kp表示待調節的比例系數,ki表示待調節的積分系數。
30、優選地,所述通過當前電機機械角度和電機極對數相乘得到當前電機電氣角度,計算公式如下:
31、
32、其中,pn表示電機極對數,表示估計電機電氣角度,表示估計電機機械角度,θe表示當前電機電氣角度,θm表示當前電機機械角度。
33、優選地,所述將電機輸入的給定位置信號分解為低頻擺動信號與高頻振動信號,其中所述低頻擺動信號與高頻振動信號的表達式如下:
34、低頻擺動信號θ(t)l:
35、θ(t)l=asin(ωlt),t>0
36、高頻振動信號θ(t)h:
37、
38、其中,a表示低頻擺動信號的幅度,ωl表示低頻擺動信號的頻率,t表示時間,θh表示高頻振動信號的幅度,th表示高頻振動信號的周期。
39、優選地,所述位置環采用比例微分控制,且公式如下:
40、
41、其中,iq*表示位置環的輸出,θerr表示給定角度與當前電機機械角度作差后的值,kp表示待調節的比例系數,kd表示待調節的微分系數。
42、優選地,所述將位置環的輸出和預設的參考電流作為d、q軸電流環的輸入,電流環分別輸出兩個電壓矢量,然后將兩個電壓矢量結合當前電機電氣角度進行坐標變換以及空間矢量脈沖寬度調制,對電機進行矢量控制,實現電動牙刷的掃振一體位置控制,包括:
43、對電機進行矢量控制過程中,將兩個電壓矢量結合當前電機電氣角度進行park逆變換得到兩個交流電壓,然后再將該兩個交流電壓通過空間矢量脈沖寬度調制算法得到數字驅動信號,將數字驅動信號輸入至三相逆變器,產生頻率與幅值均不斷變化的三相正弦交流電,輸入到電機定子端,驅動電機轉動,同時三相正弦交流電依次經過clark變換和park變換得到實際反饋電流,將實際反饋電流分別與位置環的輸出和預設的參考電流作差作為電流環的輸入進行循環控制,然后繼續對電機進行循環矢量控制,不斷更新三相正弦交流電,驅動電機轉動,實現電動牙刷的掃振一體位置控制。
44、與現有技術相比,本發明的有益效果為:
45、本電動牙刷伺服系統控制方法首先對線性霍爾傳感器輸出正余弦信號進行直流偏置以及幅值補償,補償后采用鎖相環解碼得到當前霍爾角度,即當前電機機械角度,減小霍爾安裝、元器件精度、磁場強度等造成的霍爾信號誤差,提高解碼速度和精度;并通過將電機的給定位置信號分解為低頻擺動信號和高頻振動信號,將低頻擺動信號和高頻振動信號疊加后,采用位置環比例微分控制加電流環的雙閉環方法實現電動牙刷高頻疊加低頻位置控制,提高電機對高頻位置指令的響應,在保證清潔力度的同時能讓用戶擁有良好的刷牙體驗。
- 還沒有人留言評論。精彩留言會獲得點贊!