一種超燃沖壓發動機主推力閉環-進氣道不起動保護控制軟切換方法
本發明屬于航空發動機仿真與控制領域,對超燃沖壓發動機主推力閉環-進氣道不保護控制切換系統進行了研究設計,并通過仿真實驗驗證了所提出的燃油-推力進氣道不起動控制的有效性和控制系統的切換平穩性,具體為一種超燃沖壓發動機主推力閉環-進氣道不起動保護控制軟切換方法。
背景技術:
1、為了滿足空天推進系統和超聲速武器的高超聲速遠程飛行需求,吸氣式推進技術的研發愈發受到關注。超燃沖壓發動機憑借其在飛行馬赫數、比沖、耗油率以及航程上較大的優越性,可以作為單級入軌空天飛機、高超聲速導彈的發動機,已經成為世界大國研究的熱點之一,引起了國內外學者的廣泛關注。
2、在超燃沖壓發動機中,需要確保在各種工況下都能夠提供穩定的推力輸出,因此推力閉環控制至關重要,一般由控制系統根據反饋信號調整燃料供給或噴口幾何形狀等手段來實現,目前的相關研究主要集中于更為準確的動態建模與仿真、控制算法的優化等方面;另一方面,當發動機飛行狀態改變,則進氣道內激波系統亦會發生改變,導致飛行馬赫數降低、飛行器攻角過大、發動機隔離段反壓過高等問題的出現,可能造成產生的空氣流量突然降低甚至熄火,因此針對進氣道不起動及不穩定工作狀態的保護控制設計也尤為關鍵。而超燃沖壓發動機系統的復雜性使得控制系統的設計和優化變得復雜,盡管目前已經通過包括pid控制、模型預測控制(mpc)、自適應控制等在內的控制算法的優化設計及仿真,實現了更高的精度和響應速度,但在實際高速飛行中仍然存在著不確定性和風險但面臨著復雜的飛行環境和動態氣流變化的挑戰,因此需要進一步提高控制系統的魯棒性和適應性。
3、超燃沖壓發動機的控制系統在實際工作模式為:當系統在收到進氣道不起動預警信號時由主推力回路切換為進氣道不起動保護控制,并在維持一段時間穩定后逐次恢復推力,最終切換回主推力控制回路。兩種控制回路的控制器和參數均存在差異,因此引入切換控制是必要的。將推力閉環控制和進氣道不啟動保護控制有機地結合起來,通過在不同工況下實現控制系統的切換,以適應不同的飛行狀態和環境變化,實現對超燃沖壓發動機更全面、靈活和可靠的控制。
4、然而,控制器間的切換往往導致控制回路產生瞬間波動,使得輸出的控制信號不連續,這種特殊的暫態行為會嚴重影響控制系統的性能,甚至會導致系統失控。在進氣道不起動預警發生時,控制系統會由主推力閉環控制器切換到進氣道不起動保護控制,從而可能引起波動。對用于飛行器這種具有高精度、高可靠性要求的超燃沖壓發動機,這種劇烈的控制信號顛簸是要一定極力避免的。因此需要設計一種平滑切換控制方法,采取適當的控制策略防止或抑制信號的瞬時顛簸行為,避免由信號顛簸產生的系統性能損害、設備故障等負面影響,該思想可追溯至上世紀60年代,最初旨在降低執行器飽和導致的信號顛簸對控制系統的負面影響。長期以來,很多學者圍繞抑制切換擾動原理,提出了相應的切換控制策略,主要思路包括動態控制器重置、改善控制器結構和對控制信號施加限制等。
5、本發明基于抑制切換擾動原理,針對超燃沖壓發動機控制系統在實際工作中由主推力閉環控制器切換到進氣道不起動保護控制會產生的波動問題,提出了一種超燃沖壓發動機主推力閉環-進氣道不起動保護控制軟切換方法,實現了兩個控制系統之間的平滑切換,減小控制器切換帶來的控制信號抖動,以滿足控制系統可靠、穩定的控制需求。
技術實現思路
1、為了滿足超燃沖壓發動機控制系統穩定性和準確性的性能需求,本發明首先構建了穩態模型及控制用實時模型,然后設計了其主推力閉環控制及進氣道不起動保護控制系統,并提出了控制軟切換方法,減小控制器切換帶來的控制信號抖動,以滿足控制系統切換的穩定性需求。
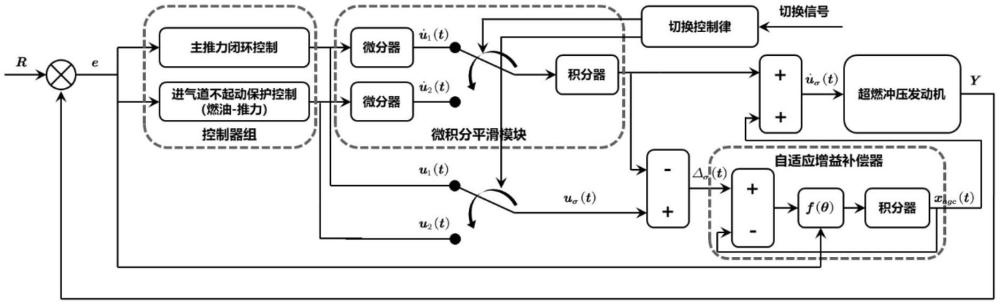
2、本發明的基本思想為:通過微積分平滑模塊,對各個控制器的輸出進行微分,然后通過時間驅動切換策略切換到另一個控制器,得到激活控制器的微分項,最后對各個控制器積分后通過共同積分器來保證切換的平滑過渡;并設計自適應增益補償器,形成主推力閉環控制器和進氣道不起動保護燃油-推力控制器的控制軟切換方法,平滑控制信號,消除控制器切換引起的抖動,以消除控制器切換帶來的瞬間突變、甚至不穩定的不良影響。
3、本發明的技術方案如下:
4、一種超燃沖壓發動機主推力閉環-進氣道不起動保護控制軟切換方法,包括如下步驟:
5、s1:超燃沖壓發動機準一維穩態模型及控制用實時模型的建模
6、超燃沖壓發動機由前體、進氣道、隔離段、燃燒室和尾噴管組成,其準一維穩態模型包括了前體、進氣道、隔離段和尾噴管的零維模型和燃燒室一維模型。考慮到部件零維模型已相對成熟,屬于公知技術,不再贅述。因此,重點介紹燃燒室準一維常微分方程模型建立方法,以及基于集中參數的思想進行超燃沖壓發動機小偏離動態建模,推導超燃沖壓發動機主推力模型、進氣道不起動保護模型。
7、s1.1:發動機準一維穩態模型建立
8、發動機準一維穩態模型包括前體、進氣道、隔離段和尾噴管的零維模型以及燃燒室準一維模型。
9、其中,對于燃燒室,綜合考慮燃燒效率、壁面摩擦和變比熱等影響因素,構建燃燒室一維常微分方程組模型。假設燃燒室截面變化緩慢,其平均參數僅取決于空間坐標x和時間t,視為準一維流動,燃燒室的控制方程的基本形式如(1)所示,其中,表示時間項,u代表守恒量,表示通量項,f代表守恒量的通量,s表示連續項的其他源項:
10、
11、推導得超聲速燃燒室的非定常準一維控制方程如(2)所示,即發動機準一維穩態模型,其中,ρ表示氣流密度,u表示氣流速度,p表示氣流靜壓力,a表示燃燒室截面積,e表示總內能,h表示氣流總焓,f表示壁面摩擦系數,de表示水力直徑,hi表示燃燒焓,i代表能量方程中的索引,用以區分不同的能量項,qj表示噴射點燃油流量,ηj表示噴嘴處燃燒效率,j表征燃燒能量傳導方向(j=1,2,3):
12、
13、壁面摩擦系數計算如公式(3)所示,其中(φ·η)表示當量比φ和燃燒效率η相關的系數參數:
14、/=0.0018+0.001958(φ·η)+0.00927(φ·η)2-0.0088525(φ·η)3??(3)
15、仿真計算采用碳氫燃料,雙模態超燃沖壓發動機碳氫燃料燃燒效率η的計算如公式(4)所示,其中,x,y,z均為計算中間參量,δx表示網格點與噴嘴間的軸向距離,ninj表示噴嘴的個數,<f>表示軸向平均截面面積,表示當量面積系數,表示理想當量比系數,φv表示實際燃油當量比,φ0表示理想燃油當量比,l0表示理想化合系數,ma為相對流量,表示理想化合系數相關的函數。
16、
17、s1.2:控制用實時模型建模
18、在建立動態模型時,采用壓力為被控量表征發動機的推力,通過控制燃氣或燃油流量來控制壓力。對流場變量依照集中參數處理的方法,建立超燃沖壓發動機的小偏離動態模型,并推導得到超燃沖壓發動機主推力的動態模型如公式(5)所示,模型考慮了來流馬赫數高度的擾動壓力響應對燃氣流量的延遲。
19、
20、其中,k1,k2,k3為經驗系數,α表示燃氣流量的延遲參數,τ表示馬赫數和高度的延遲參數;τ1,τ2,τ3,τ4,τ5表示馬赫數和高度的延遲參數,為b、c、d、σm的函數,其選取依賴于不同發動機模型。b、c為與具體模型相關的經驗參數,可以通過對s1.1中建立的穩態模型的仿真結果擬合確定,d、σm均為與激波有關的時間常數;將集中參數化的壓力對燃油流量的動態響應簡化為一階滯后環節,如公式(6)所示,即為簡化后的超燃沖壓發動機不起動保護回路模型:
21、
22、s2:主推力-進氣道不起動保護控制系統設計
23、根據設計的超燃沖壓發動機穩態及動態模型,由超燃沖壓發動機工作原理可知,可用于超燃沖壓發動機推力控制的部件僅有幾何可調進氣道和燃油輸入。選取燃油-推力設計主推力閉環控制回路,并利用魯棒h∞控制器設計理論,設計燃油-推力進氣道不起動保護控制和燃油-激波串進氣道不起動保護控制,控制策略是通過使干擾信號到期望輸出之間的增益最小,以參數確定的控制器保證不確定系統的穩定性和魯棒性。對主推力閉環控制和燃油-推力進氣道不保護控制進行切換系統設計。由于超燃沖壓發動機實際飛行過程中的推力不可測,選取燃燒室內壁面壓力積分δp作為推力的表征量,用以進行控制設計。
24、s2.1:主推力閉環控制
25、由于超燃沖壓發動機具有強非線性、工作范圍寬廣、工作條件惡劣的特點,在其高速飛行的過程中,執行機構很微小的動作偏差都會導致很大的飛行誤差,所以要求控制器響應快速準確,且必須具備較強的魯棒性和抗擾性。利用魯棒h∞控制器設計主推力回路控制器,根據s1.2中公式(5),在一定工作條件下,即馬赫數、飛行高度一定時,推導得超燃沖壓發動機主推力的控制系統響應對燃氣流量的傳遞函數如(7)所示:
26、
27、主推力閉環控制器設計中,定義的權函數為w1(s)、w2(s)、w3(s),其中w1(s)應具有低通特性,w3(s)應偏向高通特性,增廣后的受控對象傳遞函數矩陣為:
28、
29、其中,i為單位矩陣。
30、令s為靈敏度函數、t為互補靈敏度函數、r為控制信號靈敏度函數,分別定義如下:
31、
32、其中,基于混合靈敏度的h∞控制設計問題可表述為:對增廣受控對象p(s),設計控制器k(s),使得閉環傳遞函數內部穩定,且使得閉環傳遞函數
33、
34、s2.2:進氣道不起動保護控制
35、同樣基于混合靈敏度h∞控制算法設計進氣道不起動保護燃油-推力控制器,根據s1.2中公式(6),在一定工作條件下,即馬赫數、飛行高度一定時,推導得超燃沖壓發動機不起動保護回路系統對燃氣流量的傳遞函數如式(10)所示:
36、
37、由于不起動保護回路模型的控制目標是在檢測到進氣道不起動時,能夠迅速采取控制保護措施,使超燃沖壓發動機避免啟動,以防止潛在的損壞或危險情況。因此,其控制對象的響應速度需求較之s2.1有明顯提升。故而在權函數w1(s)、w2(s)、w3(s)的選擇上,也應使w1(s)更偏向低通特性,w3(s)偏向高通特性,并降低w2(s)的整體增益,盡可能減少響應調節時間。
38、控制器求解過程和方法與s2.1類似,先根據公式(8)得到增廣后的受控對象傳遞函數矩陣,再根據公式(9)定義靈敏度函數s、互補靈敏度函數t、控制信號靈敏度函數r,求解控制器k(s),使得閉環傳遞函數內部穩定,且使得閉環傳遞函數
39、s3:控制軟切換系統設計
40、超燃沖壓發動機的控制系統在收到進氣道不起動預警信號時由主推力回路切換為進氣道不起動保護控制,并在維持一段時間穩定后逐次恢復推力,最終切換回主推力控制回路。由于s2.1和s2.2中針對兩種工作狀態的控制需求不同,且分別設計的兩種控制回路的控制器和參數均存在差異,因此有必要引入切換控制。
41、然而,控制器間的切換往往導致控制回路產生瞬間波動,會嚴重影響控制系統的性能,甚至會導致系統失控。因此,本步驟在s2完成的控制器設計基礎上,設計了軟切換系統,保證切換過程平穩可控。軟切換系統主要包含微積分平滑模塊和自適應增益補償器兩部分。
42、s3.1:微積分平滑模塊
43、首先對s2.1與s2.2所設計的主推力閉環控制器與進氣道不起動保護控制器的輸出進行微分,然后通過時間驅動切換策略切換到另一個控制器,得到激活控制器的微分項,最后對各個控制器先積分,再通過共同積分器來保證切換的平滑過渡,從而消除控制器切換帶來的瞬間突變、甚至不穩定的不良影響。
44、控制量u的微分項表示為為控制器切換選擇函數,表示當前所處的激活狀態為第i個控制器,則在第k個運行周期的控制器輸出量uk表示為:
45、
46、其中,tk-1與tk分別表示第k-1與k個運行周期相應時刻,uk-1為第k-1運行周期的控制器輸出量,表示控制器從第k-1到第k周期的控制增量。
47、由公式(11)可知,當前控制量uk是在上一時刻的控制量uk-1的基礎上增加了當前閉環回路控制器的控制增量因此不同控制器切換時不會導致控制量u發生突變,實現了不同控制器切換瞬間的平滑過渡。
48、s3.2:自適應增益補償器
49、考慮以下切換系統:
50、
51、輸入信號為經典反饋控制,因此可得:
52、uσ(t)=kσ(t)x(t)??(13)
53、其中,x(t)∈rn為狀態向量,為狀態向量的時間變化率,aσ(t)為切換系統的狀態矩陣,bσ(t)為切換系統的輸入矩陣;uσ(t)∈rm為控制輸入信號,切換信號σ(t):為右連續的常值分段函數,其意義為每次在m個子系統中選擇其中一個子系統,對任意的切換序列:t0<…tk…tn,t∈[tk,tk+1)時,σ(t)=i表示第i個子系統將處于激活狀態,kσ(t)為控制器的增益矩陣;對于任意的i∈i,系統矩陣、控制矩陣、輸出矩陣ai,bi,ci都為常數矩陣;把式(13)帶入式(12),并記則狀態方程寫為:
54、
55、自適應增益補償器的狀態變量和輸出變量分別定義為xagc(t)和uagc(t),因此:
56、
57、uagc(t)=xagc(t)??(16)
58、其中,為初始控制器的增益矩陣,且自適應增益補償器的初始狀態變量xagc(t0)=0;另外,增益參數kagc的表達式如公式(17)所示:
59、
60、其中e為誤差信號,a為0-1之間的常數,δ為影響濾波效果的常數。
61、另外,軟切換的控制器表達式如下:
62、
63、則補償器輸入為:
64、
65、其中,δσ(t)(x(t))為初值為0的分段常量矩陣函數。把公式(19)帶入(18),可得:
66、
67、推導得系統的閉環狀態空間方程如下:
68、
69、記且即:
70、
71、本發明的有益效果:相比于直接切換系統,具備軟切換的控制系統在切換時平穩無跳變,證明本發明設計的軟切換可有效抑制切換過程帶來的控制顛簸,保證了發動機控制效果和運行的安全性。所提出的主推力閉環-進氣道不起動保護控制回路切換系統具有控制平穩無跳變的優點。
- 還沒有人留言評論。精彩留言會獲得點贊!