路徑規劃的方法、系統、設備和DSA系統與流程
本發明涉及機器人路徑規劃,尤其涉及一種路徑規劃的方法、系統、設備和dsa系統。
背景技術:
1、針對移動機器人從起始點到目標點進行路徑規劃時,可以采用優化算法、圖搜索算法和采樣算法進行路徑規劃。優化算法包括遺傳算法、蟻群算法、粒子群算法和人工勢場法;圖搜索算法包括dijkstra算法;采用算法包括rrt算法和rrt*-connect算法。
2、但是,優化算法容易陷入局部最優,規劃效果差。蟻群算法在高維度下計算量大,且不適用于復雜環境的路徑規劃。rrt算法規劃時間長,且路徑規劃難以重復,位于狹窄區域附近路徑和碰撞區域附近路徑的規劃質量差,路徑規劃結果不符合醫生的預期。因此,現有的路徑規劃算法耗時長,效果差。
技術實現思路
1、本發明要解決的技術問題是為了克服現有技術中針對機械臂的現有的路徑規劃算法耗時長,效果差的缺陷,提供一種路徑規劃的方法、系統、設備和dsa系統。
2、本發明是通過下述技術方案來解決上述技術問題:
3、第一方面,本發明提供一種路徑規劃的方法,應用于醫療設備,所述醫療設備包括機械臂,所述方法包括:
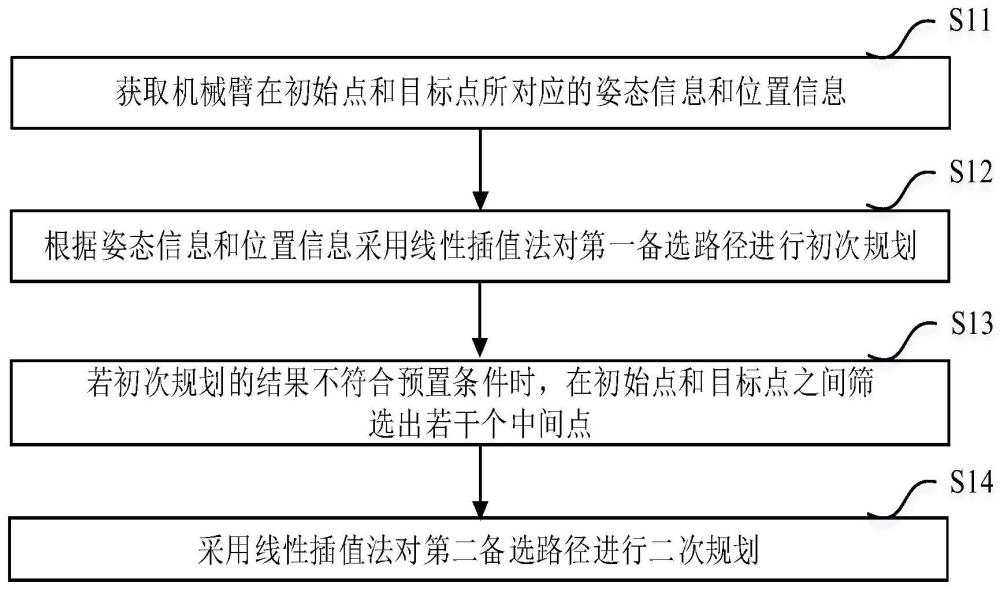
4、獲取所述機械臂在初始點和目標點所對應的姿態信息和位置信息;所述初始點和所述目標點構成第一備選路徑;
5、根據所述姿態信息和所述位置信息采用線性插值法對所述第一備選路徑進行初次規劃;
6、若所述初次規劃的結果不符合預置條件時,在所述初始點和所述目標點之間篩選出若干個中間點;所述若干個中間點與所述初始點、所述目標點共同構成若干個第二備選路徑,所述預置條件用于實現所述機械臂的無碰撞路徑規劃;
7、采用所述線性插值法對所述第二備選路徑進行二次規劃。
8、較佳地,所述方法還包括:
9、若所述二次規劃的結果不符合所述預置條件時,采用分步規劃法對所述第一備選路徑和/或所述第二備選路徑進行三次規劃;所述分步規劃法用于表征當所述機械臂沿著規劃路徑進行模擬運動時,保持所述機械臂的所述姿態信息與預設目標姿態相一致的條件下進行路徑規劃,或者,保持所述機械臂的所述姿態信息與預設原始姿態相一致的條件下進行路徑規劃。
10、較佳地,在進行所述初次規劃、所述二次規劃和/或所述三次規劃的過程中,使用迭代脫離碰撞法進行規劃優化;
11、所述使用迭代脫離碰撞法進行規劃優化的步驟,包括:
12、當所述機械臂沿著每個所述第一備選路徑和/或所述第二備選路徑進行模擬運動時,獲取首次碰撞點的第一碰撞位置信息和末位碰撞點的第二碰撞位置信息;
13、根據所述第一碰撞位置信息和所述第二碰撞位置信息,采用脫離碰撞函數獲取預設數量的調整后的首位碰撞點和末位碰撞點;
14、對所述調整后的首位碰撞點和末端碰撞點構成的調整后的調整備選路徑重新進行路徑規劃。
15、較佳地,當所述機械臂沿著每個所述第一備選路徑和/或所述第二備選路徑進行模擬運動之前,所述方法還包括:
16、檢測所述機械臂在相鄰所述第一備選路徑和/或所述第二備選路徑開始進行模擬運動所對應的時間截點的差值是否大于預設時間閾值;
17、若是,所述初次規劃或者所述二次規劃的結果不符合預置條件,則路徑規劃失敗。
18、較佳地,所述根據所述姿態信息和所述位置信息采用線性插值法對所述第一備選路徑進行初次規劃的步驟,包括:
19、獲取設定的旋轉矩陣;
20、在設定的角度變化速率的條件下,基于所述旋轉矩陣和所述位置信息對所述第一備選路徑進行球面線性插值,以得多個初始路徑點。
21、較佳地,所述在設定的角度變化速率的條件下,基于所述旋轉矩陣和所述位置信息對所述第一備選路徑進行球面線性插值,以得多個初始路徑點的步驟之后,還包括:
22、當所述機械臂沿著每個所述初始路徑點進行模擬運動時,根據所述機械臂的所述姿態信息進行初次規劃。
23、較佳地,所述根據所述機械臂的所述姿態信息進行初次規劃的步驟,包括:
24、根據所述姿態信息計算所述機械臂位于每個所述初始路徑點時,所述機械臂的各關節角度;
25、檢測所述各關節角度是否滿足關節閾值角度,若滿足,則路徑規劃成功。
26、第二方面,本發明提供一種路徑規劃的系統,應用于醫療設備,所述醫療設備包括機械臂,所述系統包括:
27、獲取模塊,用于獲取所述機械臂在初始點和目標點所對應的姿態信息和位置信息;所述初始點和所述目標點構成第一備選路徑;
28、初次規劃模塊,用于根據所述姿態信息和所述位置信息采用線性插值法對所述第一備選路徑進行初次規劃;
29、篩選模塊,用于若所述初次規劃的結果不符合預置條件時,在所述初始點和所述目標點之間篩選出若干個中間點;所述若干個中間點與所述初始點、所述目標點共同構成若干個第二備選路徑,所述預置條件用于實現所述機械臂的無碰撞路徑規劃;
30、二次規劃模塊,用于采用所述線性插值法對所述第二備選路徑進行二次規劃。
31、第三方面,本發明提供一種電子設備,包括處理器、存儲器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序被所述處理器執行時實現如上所述的路徑規劃的方法。
32、第四方面,本發明提供一種dsa系統,包括:
33、檢查床;
34、固定機架;
35、機械臂,設置在所述固定機架上且可轉動,所述機械臂的兩端分別設置x光發射器和x光探測器;
36、處理器,用于獲取所述機械臂在初始點和目標點所對應的姿態信息和位置信息;所述初始點和所述目標點構成第一備選路徑;
37、根據所述姿態信息和所述位置信息對所述第一備選路徑進行初次規劃;
38、若所述初次規劃的結果不符合預置條件時,在所述初始點和所述目標點之間篩選出若干個中間點;所述若干個中間點與所述初始點、所述目標點共同構成若干個第二備選路徑,所述預置條件用于實現所述機械臂的無碰撞路徑規劃;
39、對所述第二備選路徑進行二次規劃,得到目標路徑。
40、第五方面,本發明提供一種計算機可讀存儲介質,所述計算可讀存儲介質上存儲的計算機程序,所述計算機程序被處理器執行時實現如上所述的路徑規劃的方法。
41、本發明的積極進步效果在于:獲取機械臂在初始點和目標點所對應的姿態信息和位置信息;根據姿態信息和位置信息采用線性插值法對第一備選路徑進行初次規劃;若初次規劃的結果不符合預置條件時,在初始點和目標點之間篩選出若干個中間點;采用線性插值法對第二備選路徑進行二次規劃。本發明采用線性插值法對由初始點和目標點構成的第一備選路徑進行初次規劃不成功的條件下,再采用線性插值法對由初始點、中間點和目標點構成的第二備選路徑進行二次規劃,提高了規劃速度,縮短了規劃時間;多層策略進行路徑規劃的方式優化了無碰撞、平滑且滿足機械臂性能要求路徑的規劃結果。
- 還沒有人留言評論。精彩留言會獲得點贊!