一種機器人運動路徑協同規劃方法及系統、存儲介質與流程
本發明涉及機器人運動路徑規劃技術,尤其涉及一種通過調度系統與機器人之間協同規劃運動路徑的方法及系統、存儲介質。
背景技術:
1、在傳統的無人貨運機器人調度系統下,前提假設都是機器人會嚴格依照規劃的路徑導航運行,比如基于解沖突的?cbs、基于優先級的pbs,或者基于深度學習的調度系統。但是如果機器人不按照調度下發的路徑去運行,則易導致機器人之間出現異常阻擋,甚至兩車相撞的安全事故。
2、以貨運機器人為例,如果當前機器人的目標點是通過自身傳感器識別獲得,并且機器人以自主規劃路徑方式去取貨,此時若目標點相鄰位置處有其他機器人時,傳統的調度系統不會考慮機器人取貨偏離線路時,會被附近其他機器人阻擋報錯的問題,而這種情況會影響多車調度效率,更嚴重的是,當機器人取貨時,由于傳感器的盲區,還可能會導致機器人之間的碰撞,從而引發安全事故。
3、另外在某些場景下,當機器人為了規避障礙行駛在調度線路之外時,在回到設定線路上的過程中,也會需要自主規劃一條回歸路徑。而傳統調度系統的方案,也無法考慮自主規劃的路徑,和其他機器人是否存在相撞的問題。
技術實現思路
1、為此,本發明的主要目的在于提供一種機器人運動路徑協同規劃方法及系統、存儲介質,以使機器人與調度系統間能夠協同規劃出路徑安全區域,解決機器人間出現異常阻擋、碰撞問題。
2、為了實現上述目的,根據本發明的一個方面,提供了一種機器人運動路徑協同規劃方法,步驟包括:
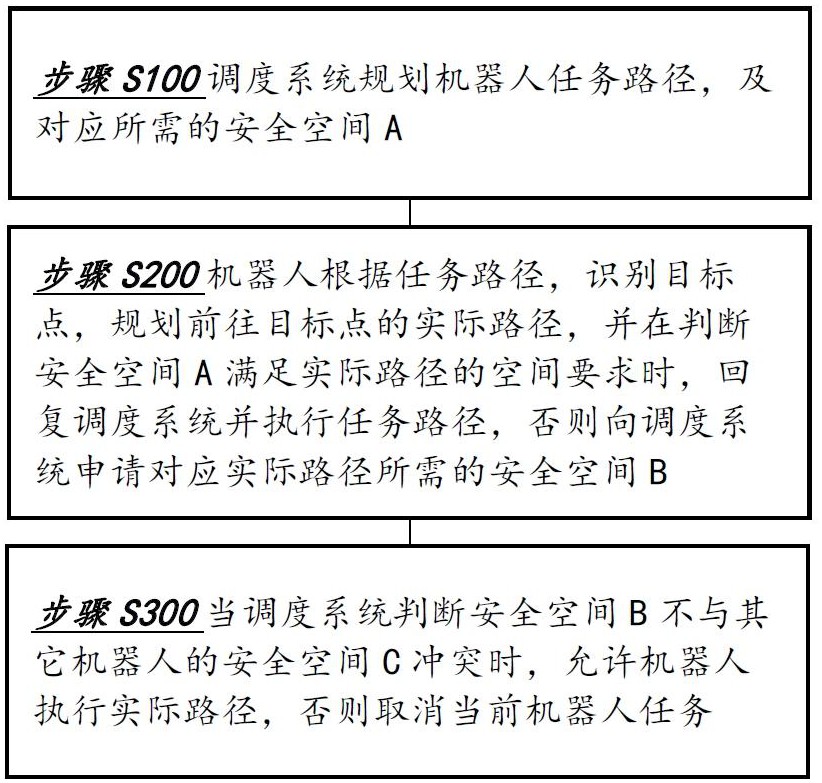
3、調度系統規劃機器人任務路徑,及對應所需的安全空間a;
4、機器人根據任務路徑,識別目標點,規劃前往目標點的實際路徑,并在判斷安全空間a滿足實際路徑的空間要求時,回復調度系統并執行任務路徑,否則向調度系統提案對應實際路徑所需的安全空間b;
5、當調度系統判斷安全空間b不與其它機器人的安全空間c沖突時,允許機器人執行實際路徑,否則取消當前機器人任務。
6、在可能的優選實施方式中,其中安全空間a的規劃步驟包括:
7、根據機器人放量車體尺寸建立包圍盒a;將任務路徑按預設間隔離散成多個點;計算包圍盒a定位中心在每個離散點上時的輪廓多邊形,并將各多邊形集合作為安全空間a。
8、在可能的優選實施方式中,其中安全空間a的規劃步驟包括:
9、根據機器人放量車體尺寸建立包圍盒a;將任務路徑按預設間隔離散成多個點;計算包圍盒a定位中心在每個離散點上時的輪廓多邊形;掃描所有多邊形取最小凸包作為安全空間a。
10、在可能的優選實施方式中,其中判斷安全空間a是否滿足實際路徑的空間要求的步驟包括:
11、根據機器人參考車體尺寸建立包圍盒b;將實際路徑按與任務路徑相同的預設間隔離散成多個點;計算包圍盒b定位中心在每個離散點上時的輪廓多邊形,并將各多邊形集合作為安全空間b;
12、按實際路徑及任務路徑上各離散點順序,依次判斷安全空間b中各多邊形皆處于安全空間a的各多邊形包圍之內時,認為安全空間a滿足實際路徑的空間要求。
13、在可能的優選實施方式中,其中判斷安全空間a是否滿足實際路徑的空間要求的步驟包括:
14、根據機器人參考車體尺寸建立包圍盒b;將實際路徑按預設間隔離散成多個點;計算包圍盒b定位中心在每個離散點上時的輪廓多邊形,掃描所有多邊形取最小凸包作為安全空間b,其中參考車體尺寸小于放量車體尺寸;
15、判斷安全空間b中各個頂點皆在安全空間a內時,認為安全空間a滿足實際路徑的空間要求。
16、在可能的優選實施方式中,其中判斷安全空間b是否與其它機器人的安全空間c沖突的步驟包括:
17、通過分離軸定理,依次判斷安全空間b中各多邊形與各安全空間c中的各多邊形是否存在重疊,若為是則認為沖突。
18、在可能的優選實施方式中,其中判斷安全空間b是否與其它機器人的安全空間c沖突的步驟包括:
19、通過分離軸定理檢測安全空間b與各安全空間c凸包對應的凸多邊形之間,是否重疊,若為是則認為沖突。
20、在可能的優選實施方式中,所述的機器人運動路徑協同規劃方法,其中步驟還包括:
21、當調度系統規劃機器人原地旋轉任務時,根據機器人放量車體尺寸建立包圍盒d,依據轉向及旋轉角度,取包圍盒d旋轉側最遠頂點的旋轉軌跡,以包圍盒d定位中心為圓心,建立扇形多邊形的安全空間d;
22、機器人根據原地旋轉任務,在當前位置以參考車體尺寸建立包圍盒d1,依據轉向及旋轉角度,取包圍盒d1旋轉側最遠頂點的旋轉軌跡,以包圍盒d1定位中心為圓心,建立扇形多邊形的安全空間d1;
23、當機器人判斷安全空間d1處于安全空間d之內時,認為安全空間d滿足原地旋轉的空間要求,回復調度系統并執行,否則向調度系統提案安全空間d1;
24、當判斷安全空間d1圓心到其它機器人的安全空間c的最短距離,小于安全空間d1扇形半徑時,認為存在沖突,否則允許機器人執行。
25、在可能的優選實施方式中,所述的機器人運動路徑協同規劃方法,其中步驟還包括:
26、機器人根據調度系統下達的原地旋轉任務,在當前位置以參考車體尺寸建立包圍盒d1,依據轉向及旋轉角度,取包圍盒d1旋轉側最遠頂點的旋轉軌跡,以包圍盒d1定位中心為圓心,建立扇形多邊形的安全空間d1,并向調度系統提案;
27、當調度系統檢測安全空間d1圓心到其它機器人的安全空間c的最短距離,小于安全空間d1扇形半徑時,認為存在沖突,否則允許機器人執行。
28、在可能的優選實施方式中,所述的機器人運動路徑協同規劃方法,其中步驟還包括:
29、機器人避障時,自主規劃回歸路徑后,向調度系統提案對應回歸路徑所需的安全空間e,當調度系統判斷安全空間e不與其它機器人的安全空間c沖突時,允許機器人執行回歸路徑,否則令當前機器人停止。
30、為了實現上述目的,對應上述方法示例,根據本發明的另一方面,還提供了一種機器人運動路徑協同規劃系統,其包括:存儲器、處理器以及存儲在所述存儲器中并可在所述處理器上運行的計算機程序,其中所述處理器執行所述計算機程序時,所述系統實現如上任一項所述機器人運動路徑協同規劃方法的步驟。
31、為了實現上述目的,對應上述方法示例,根據本發明的另一方面,還提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有計算機程序,其中所述計算機程序被執行時,實現如上任一項所述機器人運動路徑協同規劃方法的步驟。
32、通過本發明提供的該機器人運動路徑協同規劃方法及系統、存儲介質,巧妙的利用了代表機器人自身尺寸的包圍盒來建立安全空間,?以將傳統的規劃路線轉換為機器人實際行駛時所需的運動空間,從而為機器人與調度系統之間精確協同復驗調度任務的可行性打下了基礎。同時本方案還設計允許機器人在聽從調度系統調度的同時,能夠單機自主規劃路徑及安全空間,并在復驗調度任務不可行時,向調度系統自主提案,從而保證了機器人與調度系統之間,能夠相互協同驗證規劃路徑的可靠性,確保規劃路徑更符合現場狀況,從而保障機器人執行任務時的安全性及可靠性,以解決傳動調度系統與機器人間因無協同,而易出現的異常阻擋、碰撞等安全問題。
- 還沒有人留言評論。精彩留言會獲得點贊!