山地森林冠層高度精準估測方法及系統
本發明涉及山地森林冠層高度估測,尤其涉及到一種山地森林冠層高度精準估測方法及系統。
背景技術:
1、熱地森林是陸地生態系統的核心部分,在減緩全球/區域氣候變化和調節全球碳平衡方面發揮著不可替代的作用,而跨越廣闊地域的山地森林是碳封存的關鍵。森林冠層高度作為重要的森林垂直結構參數之一,是反映森林生物量、碳儲量、森林健康狀況的重要指標。因此,準確估計大面積森林高度至關重要,尤其是在復雜的山區地形下,準確量化森林冠層高度一直是國家森林資源清查任務的一項重要任務。
2、然而,在野外測量森林高度是耗時、低效率的,依靠人工野外測量來生成大尺度下的森林冠層高度是不可能的。遙感技術已被證明是大尺度森林高度反演的有效方法。光學遙感圖像已被用于實地測量,以獲得全面的森林冠高產品,不幸的是被動光學傳感器在茂密的森林中具有很強的飽和效應,另外在復雜地形條件下山體的遮擋也會導致光譜信息的丟失,導致森林高度的估計精度較低。與光學遙感圖像相比,微波遙感具有部分穿透森林冠層的能力;因此,它也被成功地用于森林高度估計;微波數據類型可以分為polsar、insar、polinsar,polsar能夠獲得植被散射特征,insar可以獲得散射體的高度,polinsar具備polsar和insar的共同特點,能夠反映地表植被散射體高度和散射特征,在區域尺度森林冠層高度反演中有著巨大潛力,然而,微波信號通常會面臨不同程度的飽和問題,這與電磁波的波長有關,有研究表明在森林中l波段sar后向散射信號在樹高為10m是接近飽和,polinsar和insar則對空間基線有嚴格的要求,在星載sar數據中這一條件通常難以完全滿足要求,比如alos/saocom衛星。最重要的一點是由于sar數據是側視成像,在山體的遮擋下會造成信號丟失,這是sar數據在山地中的最重要制約因素。
3、相比之下,激光雷達(lidar)能夠穿透森林樹冠獲取垂直結構信息。根據平臺,激光雷達系統可以分為地面激光雷達、機載激光雷達和星載激光雷達。機載激光雷達(lidar)能夠快速獲得林分冠層以及內部三維結構信息,且不受天氣條件限制,但由于采集成本高,很難應用于大面積區域。星載激光雷達更適合區域或全球尺度的森林高度反演。然而,這些星載激光雷達系統有一個共同的問題,即具有離散的地面采樣足跡,但它們仍然不能直接提供面尺度的森林冠層高度觀測。因此,多源遙感數據的結合是提升森林參數估計精度的有效途徑,多數據源的結合可以充分考慮了植被的高度、散射特征和光譜特征能夠更準確的估計森林參數。
4、常用的森林冠層高度遙感估計可以通過建立回歸模型得出面尺度的森林冠高產品。回歸模型方法可分為參數模型和非參數模型。常見的參數模型有多元逐步回歸、地理加權回歸、偏最小二乘回歸等。傳統的非參數模型主要是機器學習,但這些將現場測量數據升級為區域地圖的傳統方法無法完全捕捉山區地形的遙感信息。容易忽略了相鄰像素的信息,包括對描述空間變化至關重要的紋理圖案。隨著深度學習的進步,深度學習算法已經被用于各種遙感應用中,如時間序列分析、圖像分類等。這些方法在克服各種地理空間挑戰方面表現出了希望,正如眾多研究人員所證明的那樣,例如遞歸神經網絡(rnn),盡管標準的rnn在捕捉長時間依賴關系方面存在一定的挑戰,但其變體(如lstm和gru)解決了這一問題,使得模型可以捕捉更長時間的依賴關系。與傳統的方法不同,深度學習方法可以充分的挖掘遙感變量信息,從而提供更復雜的森林冠層高度分布表示。將深度學習與多源遙感數據相結合,可以深入了解森林結構特點,有可能大大改善區域森林高度的制圖工作。
5、綜上所述,在熱帶山地森林中,使用遙感數據進行森林冠層高度估計的挑戰主要有3點,第一是不同類型的遙感數據存在局限性。第二是復雜的地形條件放大了遙感數據的誤差。第三是森林參數的估計模型存在不確定性。
技術實現思路
1、本發明的主要目的在于提供一種山地森林冠層高度精準估測方法及系統,旨在實現區域尺度山地森林冠層高度精準估計。
2、為實現上述目的,本發明提供一種山地森林冠層高度精準估測方法包括以下步驟:
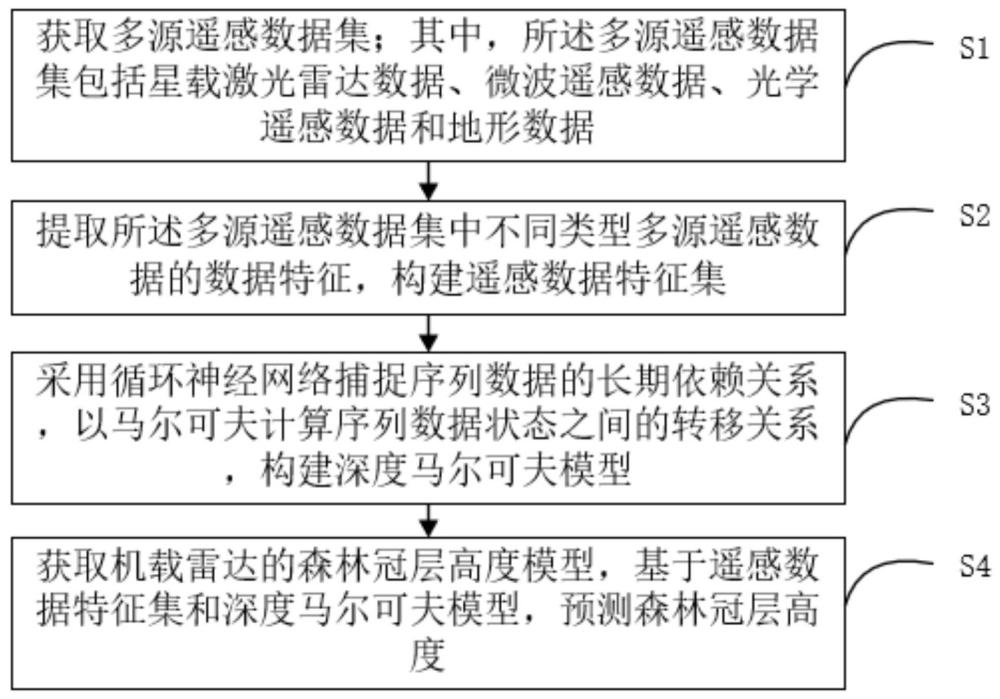
3、s1:獲取多源遙感數據集;其中,所述多源遙感數據集包括星載激光雷達數據、微波遙感數據、光學遙感數據和地形數據;
4、s2:提取所述多源遙感數據集中不同類型多源遙感數據的數據特征,構建遙感數據特征集;
5、s3:采用循環神經網絡捕捉序列數據的長期依賴關系,以馬爾可夫計算序列數據狀態之間的轉移關系,構建深度馬爾可夫模型;
6、s4:獲取機載雷達的森林冠層高度模型,基于遙感數據特征集和深度馬爾可夫模型,預測森林冠層高度。
7、可選的,所述步驟s2中,提取星載激光雷達數據中的數據特征,具體包括:
8、s21:提取星載激光雷達數據中的冠層高度、總冠層覆蓋率、植物面積指數和葉高多樣性指數;
9、s22:采用地統計學中的克里金插值法將冠層高度、總冠層覆蓋率、植物面積指數和葉高多樣性指數的光斑點數據插值為面數據作為數據特征。
10、可選的,所述步驟s2中,提取微波遙感數據中的數據特征,具體包括:
11、s23:基于全極化微波遙感數據計算后向散射系數、極化比、雷達植被指數和極化分解參數作為數據特征。
12、可選的,所述步驟s2中,提取光學遙感數據中的數據特征,具體包括:
13、s24:提取光學遙感數據中的原始單波段變量、波段組合變量、植被指數等參數作為數據特征。
14、可選的,所述步驟s2中,提取地形數據中的數據特征,具體包括:
15、s25:基于數字高程模型數據,計算地形坡度,根據地形坡度計算結果,將坡度劃分為6個坡度等級;
16、s26:將坡度等級轉換為啞變量。
17、可選的,所述步驟s3中,采用循環神經網絡捕捉序列數據的長期依賴關系,具體包括:
18、s31:采用處理序列數據的神經網絡架構捕捉輸入序列數據每個時間步的長期依賴關系,輸出隱藏狀態作為下一個時間步的輸入,構建循環神經網絡;
19、其中,所述循環神經網絡的隱藏狀態更新的表達式,具體為:
20、、
21、其中,是時間步t的輸入數據,h是時間t的隱藏狀態,f是循環神經網絡的轉移函數。
22、可選的,所述步驟s3中,以馬爾可夫計算序列數據狀態之間的轉移關系,具體包括:
23、s32:利用馬爾可夫模型中前一個狀態對應的轉換概率分布控制下一個狀態的狀態轉換;
24、其中,馬爾可夫模型中,當前狀態的概率分布的表達式,具體為:
25、、
26、其中,和分別表示當前狀態的均值和方差,由轉移函數f計算得到。
27、可選的,所述步驟s3中,構建深度馬爾可夫模型,具體包括:
28、s33:將循環神經網絡的輸出驅動計算馬爾可夫模型的每個時間的狀態轉移參數,同時考慮到序列中的長期依賴關系和狀態之間的轉移關系,構建獲得深度馬爾可夫模型;
29、其中,深度馬爾可夫模型的表達式,具體為:
30、、
31、其中,是循環神經網絡在時間步t的輸出,和分別表示當前狀態的均值和方差,由循環神經網絡的輸出和轉移函數f計算得到。
32、可選的,所述步驟s4中,獲取機載雷達的森林冠層高度模型,基于遙感數據特征集和深度馬爾可夫模型,預測森林冠層高度,具體包括:
33、s41:以機載雷達的森林冠層高度模型為因變量,以遙感數據特征集中的遙感數據特征為自變量,利用深度馬爾可夫模型進行森林冠層高度預測。
34、此外,為了實現上述目的,本發明還提供了一種山地森林冠層高度精準估測系統,包括:
35、獲取模塊,用于獲取多源遙感數據集;其中,所述多源遙感數據集包括星載激光雷達數據、微波遙感數據、光學遙感數據和地形數據;
36、提取模塊,用于提取所述多源遙感數據集中不同類型多源遙感數據的數據特征,構建遙感數據特征集;
37、構建模塊,用于采用循環神經網絡捕捉序列數據的長期依賴關系,以馬爾可夫計算序列數據狀態之間的轉移關系,構建深度馬爾可夫模型;
38、預測模塊,用于獲取機載雷達的森林冠層高度模型,基于遙感數據特征集和深度馬爾可夫模型,預測森林冠層高度。
39、本發明的有益效果在于:提出了一種山地森林冠層高度精準估測方法及系統,該方法包括:獲取多源遙感數據集;其中,所述多源遙感數據集包括星載激光雷達數據、微波遙感數據、光學遙感數據和地形數據;提取所述多源遙感數據集中不同類型多源遙感數據的數據特征,構建遙感數據特征集;采用循環神經網絡捕捉序列數據的長期依賴關系,以馬爾可夫計算序列數據狀態之間的轉移關系,構建深度馬爾可夫模型;獲取機載雷達的森林冠層高度模型,基于遙感數據特征集和深度馬爾可夫模型,預測森林冠層高度。本發明基于landsat8光學遙感數據、alos-2極化sar數據、星載激光雷達gedi數據,以地形坡度為啞變量,采用深度學習的馬爾可夫回歸dmr進行森林冠層高度估計,能有效提高山地條件下森林冠層高度估計精度。
- 還沒有人留言評論。精彩留言會獲得點贊!