手車斷路器狀態在線監測方法及裝置與流程
本發明涉及手車斷路器,更具體地說,本發明涉及手車斷路器狀態在線監測方法及裝置。
背景技術:
1、各個斷路器位置狀態可能會發生不同的故障或異常;在開路位置,故障可能包括手車無法完全打開或卡住,導致刀閘無法分開,電路無法斷開;在閉路位置,可能出現手車無法完全閉合或閉合時異常,導致電接觸不良或無法有效導通電流;而在未知位置,則可能是由于傳感器故障、監控系統錯誤或操作誤判,導致無法準確判斷刀閘的具體位置狀態,增加了操作風險和安全隱患;因此,及時的故障診斷和修復對于確保斷路器安全、可靠運行至關重要。
2、例如公告號為:cn114089175a的發明專利公告的一種手車斷路器機械特性在線監測裝置,通過裝置本體,所述本體上設有顯示裝置、傳感器、固定板和傳感控制器;所述傳感器包括分閘時間傳感器、合閘時間傳感器、操作信號發生傳感器,所述分閘時間傳感器、合閘時間傳感器、操作信號發生傳感器分別安裝于相應的二次回路線上;所述傳感控制器分別與所述傳感器和所述顯示裝置電性連接。本發明相比現有技術,可直接測量運行設備數據,操作簡便快捷,只需安裝停電一次,后續監測時無需停電,大大提高了設備可靠性。
3、例如公告號為:cn107179424b的發明專利公告的一種手車斷路器機械特征性試驗的連線方法,通過選擇一個手車斷路器插件,一個航空插件;所述手車斷路器插件包括多個觸角,所述航空插件包括出線板進線板,以及位于觸角上方的空心柱,一個觸角上方設置一個空心柱,所述進線板與空心柱開口端連接,進線板設置與空心柱開口相匹配的進線口;步驟2:確定待測觸角數量,選擇相對應的連接線,所述連接線一側為探頭結構,所述探頭在空心柱內可上下滑動;步驟3:在出線板上設置與待測觸角數量相同的出線口,所述出線口通過接線件與連接線另一側固定連接;步驟4:讓連接線的探頭通過空心柱下滑,使得探頭與觸角接觸,接著用萬用表通斷檔測試連接線是否通電。
4、上述公開的技術方案中,至少存在如下技術問題:
5、現有的狀態監測只有外在的狀態監測或者通過人工巡檢進行,對手車斷路器不同位置下的實際狀態并沒有很好的監測。
6、針對上述問題,本發明提出一種解決方案。
技術實現思路
1、為了克服現有技術的上述缺陷,本發明的實施例提供手車斷路器狀態在線監測方法及裝置,通過手車斷路器狀態在線監測,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:
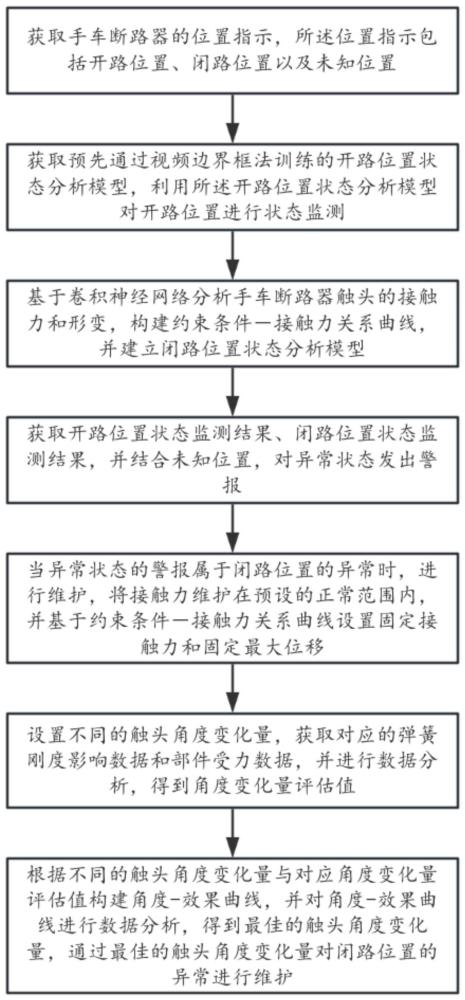
3、手車斷路器狀態在線監測方法及裝置,包括如下步驟:獲取手車斷路器的位置信息,所述位置信息包括開路位置、閉路位置以及未知位置;獲取預先通過視頻邊界框法訓練的開路位置狀態分析模型,利用所述開路位置狀態分析模型對開路位置進行狀態監測;獲取預先通過仿真建模接觸力分析訓練的閉路位置狀態分析模型,利用所述閉路位置狀態分析模型對閉路位置進行狀態監測;獲取開路位置狀態監測結果、閉路位置狀態監測結果,并結合未知位置,對異常狀態發出警報。
4、在一個優選的實施方式中,所述開路位置狀態分析模型的具體構建方法如下:首先獲取手車斷路器的原始圖像;然后使用邊界框或框架對檢測圖像中狀態分析的區域進行限定和后處理;接著基于光學字符識別技術對限定區域進行特征字符提取和識別監測;最后通過決策算法根據特征字符的差異對手車斷路器開路位置狀態進行判斷。
5、在一個優選的實施方式中,所述使用邊界框或框架對檢測圖像中狀態分析的區域進行限定和后處理的具體方法如下:首先,范圍確定:基于預處理后的圖像,在圖像中選擇四個坐標,將待分析范圍確定為四個坐標相連內的區域;接著對坐標的連線作為警戒線,將圖像區域進行限定,最后對限定區進行監測,剔除限定區外的圖像數據。
6、在一個優選的實施方式中,所述基于光學字符識別技術對限定區域進行特征字符提取和識別監測,具體為:從限定區域提取特征圖,并通過relu激活函數激活特征圖;將多個特征圖建立序列,并依次通過循環層,進行捕捉序列中的特征字符信息;結合預設的ctc損失函數進行訓練,得到所有特征字符差異的集合。
7、在一個優選的實施方式中,所述通過決策算法根據特征字符的差異對手車斷路器開路位置狀態進行判斷,具體為:計算特征字符差異的集合內的兩個特征字符的歐式距離;將所述歐式距離與預設的狀態評估閾值作比較,將歐式距離小于預設狀態評估閾值的狀態設為同一狀態,否則為不同狀態;根據已知特征字符的狀態,確定手車斷路器開路位置狀態。
8、在一個優選的實施方式中,所述通過仿真建模接觸力分析訓練的閉路位置狀態分析模型的具體為:首先通過虛擬樣機技術基于相關建模軟件聯合對手車斷路器進行三維建模;然后對模型不影響仿真效果的部分進行簡化;接著對簡化后模型建立材料和單位部分的網格,得到仿真模型;并創建約束條件,通過調節約束條件的參數,對手車斷路器閉路位置下的梅花觸頭工作狀態進行模擬;最后通過仿真模型基于卷積神經網絡分析手車斷路器觸頭的接觸力和形變建立閉路位置狀態分析模型。
9、在一個優選的實施方式中,所述對模型不影響仿真效果的部分進行簡化,具體為:將同一組內的觸片簡化為一個觸指單元;去除觸指上存在用于安裝彈簧的凹槽,采用簡化的直線模型來替代;使用與實際對應的彈簧單元模型,選擇彈簧的連接位置、設定剛度系數和預緊力,模擬彈簧對梅花觸頭的徑向作用;對于相鄰的彈簧,將其簡化為一組進行等效加載。
10、在一個優選的實施方式中,所述創建約束條件,通過調節約束條件的參數,對手車斷路器閉路位置下的梅花觸頭工作狀態進行模擬,具體為:所述梅花觸頭工作狀態,包括正常狀態、橫向偏移異常狀態、縱向偏移異常狀態、角度偏移異常狀態;在仿真軟件中創建合適的約束條件,所述約束條件包括靜觸頭的位置和觸頭姿態以及彈簧的剛度系數;所述觸頭姿態包括在y軸方向的位移、x軸方向的位移、繞x軸的角度以及繞y軸的角度;對每個約束條件的參數基于進行單獨設置和調整,得到其他約束條件參數的變化量,并結合梅花觸頭工作狀態建立對應約束條件-接觸力關系曲線。
11、在一個優選的實施方式中,所述仿真模型基于卷積神經網絡分析手車斷路器觸頭的接觸力和形變建立閉路位置狀態分析模型,具體為:獲取歷史的手車斷路器閉路位置下觸頭的數據,將數據通過模型仿真得到約束條件-接觸力關系數據集;所述卷積神經網絡包括第一卷積層、第二卷積層、第三卷積層;將約束條件-接觸力關系數據集添加噪聲進行數據增強;
12、通過第一卷積層對增強的約束條件-接觸力關系數據集進行降維;
13、通過第二卷積層降低增強的約束條件-接觸力關系數據集的復雜度;
14、通過第三卷積層基于處理后的約束條件-接觸力關系數據集激活和構建閉路位置狀態分析模型。
15、手車斷路器狀態在線監測裝置,包括位置監測模塊、閉路監測模塊、開路監測模塊、報警模塊;位置監測模塊,用于獲取手車斷路器的位置信息,所述位置信息包括開路位置、閉路位置以及未知位置;開路監測模塊,用于獲取預先通過視頻邊界框法訓練的開路位置狀態分析模型,利用所述開路位置狀態分析模型對開路位置進行狀態監測;閉路監測模塊,用于獲取預先通過仿真建模接觸力分析訓練的閉路位置狀態分析模型,利用所述閉路位置狀態分析模型對閉路位置進行狀態監測;報警模塊,用于獲取開路位置狀態監測結果、閉路位置狀態監測結果,并結合未知位置,對異常狀態發出警報。
16、本發明手車斷路器狀態在線監測方法及裝置的技術效果和優點:
17、1.本發明通過視頻邊界框法訓練開路位置狀態分析模型,能夠有效地從原始圖像中提取關鍵信息,實現對手車斷路器開路位置狀態的精確監測;這種方法不僅提高了監測的準確性和效率,還能夠有效地應對復雜場景和多變的操作環境,為工業設備的安全運行和維護提供了有力支持。
18、2.本發明通過利用仿真建模技術和卷積神經網絡分析手車斷路器閉路位置下梅花觸頭的工作狀態。通過建立精確的三維模型并簡化不影響仿真效果的部分,包括觸指單元的簡化和凹槽采用直線模型替代。約束條件的設置通過調節參數模擬觸頭在正常和異常工作狀態下的行為,這些狀態包括正常、橫向偏移、縱向偏移和角度偏移。利用卷積神經網絡分析觸頭的接觸力和形變,建立閉路位置狀態分析模型,這一技術能夠準確評估和預測斷路器的安全性和性能,對電力設備的長期可靠性和安全性提供了重要的技術支持和保障。
- 還沒有人留言評論。精彩留言會獲得點贊!