一種基于航空測繪技術的地形測繪方法及系統與流程
本發明涉及數據處理,特別是指一種基于航空測繪技術的地形測繪方法及系統。
背景技術:
1、傳統的地形測繪方法主要包括人工實地測量和衛星遙感測繪等。這些方法在過去的地形測繪工作中發揮了重要作用,但隨著技術的不斷進步和應用需求的提升,它們逐漸暴露出一些固有的缺陷和不足。
2、例如,人工實地測量雖然能夠提供較為準確的數據,但測量過程耗時耗力,效率低下,且對于復雜地形和惡劣環境的適應性較差。此外,人工測量還存在一定的安全隱患,特別是在高山、峽谷等危險區域進行測量時,人員的安全難以得到充分保障。
3、其次,衛星遙感測繪雖然具有覆蓋范圍廣、數據獲取周期短等優勢,但其分辨率和精度往往受到衛星軌道高度、傳感器性能以及大氣條件等多種因素的限制。因此,在需要高精度地形數據的場景中,衛星遙感測繪可能無法滿足需求。
技術實現思路
1、本發明要解決的技術問題是提供一種基于航空測繪技術的地形測繪方法及系統,可以快速捕獲目標區域的地形數據,不僅提高了地形測繪的效率和精度,還降低了測繪成本和安全風險。
2、為解決上述技術問題,本發明的技術方案如下:
3、第一方面,一種基于航空測繪技術的地形測繪方法,所述方法包括:
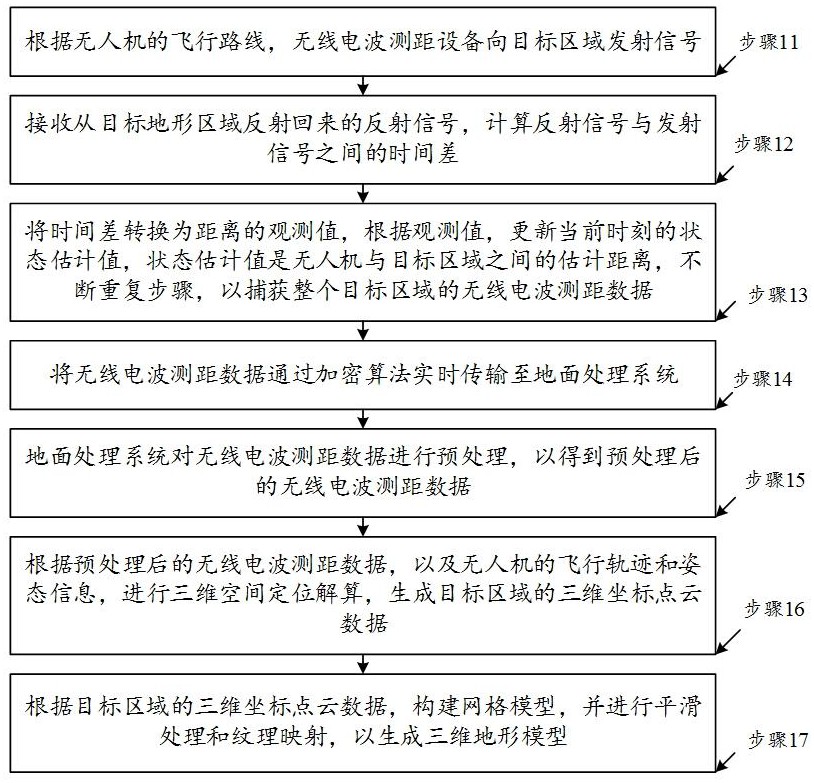
4、根據無人機的飛行路線,無線電波測距設備向目標區域發射信號;
5、接收從目標地形區域反射回來的反射信號,計算反射信號與發射信號之間的時間差;
6、將時間差轉換為距離的觀測值,根據觀測值,更新當前時刻的狀態估計值,狀態估計值是無人機與目標區域之間的估計距離,不斷重復步驟,以捕獲整個目標區域的無線電波測距數據;
7、將無線電波測距數據通過加密算法實時傳輸至地面處理系統;
8、地面處理系統對無線電波測距數據進行預處理,以得到預處理后的無線電波測距數據;
9、根據預處理后的無線電波測距數據,以及無人機的飛行軌跡和姿態信息,進行三維空間定位解算,生成目標區域的三維坐標點云數據;
10、根據目標區域的三維坐標點云數據,構建網格模型,并進行平滑處理和紋理映射,以生成三維地形模型。
11、進一步的,根據無人機的飛行路線,無線電波測距設備向目標區域發射信號,包括:
12、根據無人機的飛行路線,定義螞蟻個體,其中,每個螞蟻代表一個無線電波測距設備的信號發射策略,信號發射策略包括發射方向、發射強度和發射時間;
13、根據螞蟻個體,確定用于表示不同發射策略優劣的信息素濃度;
14、根據信息素濃度,構建解空間,解空間由無人機飛行路線上的所有可能發射點組成,每個點都可能是螞蟻選擇發射信號的當前位置;
15、每只螞蟻根據當前位置和解空間中的信息素濃度,按照一定的概率選擇下一個發射點;每當螞蟻選擇一個發射點后,根據發射點的優劣更新該發射點上的信息素濃度;
16、當所有螞蟻完成一輪發射點的選擇后,評估每只螞蟻所代表的發射策略的性能,以得到評估結果;
17、根據評估結果,調整信息素的更新規則,重復進行螞蟻路徑選擇和評估優化階段,直到達到預設的迭代次數,以得到最終的無線電波測距設備發射策略,無線電波測距設備發射策略包括最終的發射點序列、發射強度和發射時間;
18、根據最終的無線電波測距設備發射策略,無線電波測距設備向目標區域發射信號。
19、進一步的,接收從目標地形區域反射回來的反射信號,計算反射信號與發射信號之間的時間差,包括:
20、在發射信號后,無線電波測距設備捕獲反射信號;
21、初始化梯度下降參數,計算接收到的反射信號與發射信號之間的預估差;
22、定義一個用于衡量預估差準確性的損失函數;
23、根據損失函數的梯度信息,調整預估差,重復此過程,直到達到預設的迭代次數,以得到最終的時間差。
24、進一步的,將無線電波測距數據通過加密算法實時傳輸至地面處理系統,包括:
25、根據對稱加密算法,生成一個初始的加密密鑰;
26、對所述初始的加密密鑰進行優化,以得到優化密鑰;
27、將無線電波測距數據使用優化密鑰進行加密,以得到加密后的測距數據;
28、將加密后的測距數據封裝成傳輸的數據包格式,以得到封裝好的數據包;
29、將封裝好的數據包發送至地面處理系統。
30、進一步的,對所述初始的加密密鑰進行優化,以得到優化密鑰,包括:
31、根據對稱加密算法,確定密鑰的長度;
32、隨機生成一組初始密鑰作為初始種群,每個密鑰代表一個個體;
33、定義用于評估每個密鑰優劣的適應度函數;
34、根據適應度函數,對每個初始密鑰計算其適應度值;
35、根據適應度函數值,確定種群中的個體進入交叉操作,以產生新的密鑰;
36、對新的密鑰進行變異操作,迭代優化,直到達到預設的迭代次數,以得到優化密鑰。
37、進一步的,根據預處理后的無線電波測距數據,以及無人機的飛行軌跡和姿態信息,進行三維空間定位解算,生成目標區域的三維坐標點云數據,包括:
38、將無人機的飛行軌跡和姿態信息從無人機自身的坐標系轉換到全局坐標系;
39、根據無人機的姿態和位置信息,將無線電波測距數據從無人機坐標系轉換到全局坐標系;
40、對于每個測距數據點,根據其在全局坐標系中的位置和測距值,建立與目標點之間的測距方程;
41、求解測距方程,以確定目標點在全局坐標系中的三維坐標;
42、將所有解算出的目標點位置組合起來,形成目標區域的三維坐標點云數據。
43、進一步的,根據目標區域的三維坐標點云數據,構建網格模型,并進行平滑處理和紋理映射,以生成三維地形模型,包括:
44、讀取目標區域的三維坐標點云數據,對于三維坐標點云數據中的每個點,計算每個點與其鄰近點之間的距離,并進行篩選,以得到濾波后的三維坐標點云數據集;
45、通過三角剖分,將濾波后的三維坐標點云數據集轉換為一個由三個頂點確定的三角網格;
46、對于三角網格中的每個頂點,找出與其直接相連的鄰接頂點,對于每個頂點,計算其所有鄰接頂點的平均位置;
47、將頂點向其鄰接頂點的平均位置移動一段距離,重復頂點位置調整過程,直到達到預設的迭代次數,以得到優化后的三角網格;
48、獲取目標區域的二維紋理圖像,對二維紋理圖像進行預處理,以得到預處理后的紋理圖像;
49、對于三角網格中的每個三角形,根據其頂點在紋理圖像上的對應位置,計算三角網格的紋理坐標;
50、使用紋理坐標,將預處理后的紋理圖像映射到三角網格上,為每個三角網格賦予相應的紋理信息,以得到映射的紋理信息;
51、根據優化后的三角網格和映射的紋理信息,生成最終的三維地形模型。
52、第二方面,一種基于航空測繪技術的地形測繪系統,包括:
53、發射模塊,用于根據無人機的飛行路線,無線電波測距設備向目標區域發射信號;
54、接收模塊,用于接收從目標地形區域反射回來的反射信號,計算反射信號與發射信號之間的時間差;
55、處理模塊,用于將時間差轉換為距離的觀測值,根據觀測值,更新當前時刻的狀態估計值,狀態估計值是無人機與目標區域之間的估計距離,不斷重復步驟,以捕獲整個目標區域的無線電波測距數據;
56、傳輸模塊,用于將無線電波測距數據通過加密算法實時傳輸至地面處理系統;
57、預處理模塊,用于地面處理系統對無線電波測距數據進行預處理,以得到預處理后的無線電波測距數據;
58、計算模塊,用于根據預處理后的無線電波測距數據,以及無人機的飛行軌跡和姿態信息,進行三維空間定位解算,生成目標區域的三維坐標點云數據;
59、構建模塊,用于根據目標區域的三維坐標點云數據,構建網格模型,并進行平滑處理和紋理映射,以生成三維地形模型。
60、第三方面,一種計算設備,包括:
61、一個或多個處理器;
62、存儲裝置,用于存儲一個或多個程序,當所述一個或多個程序被所述一個或多個處理器執行,使得所述一個或多個處理器實現所述的方法。
63、第四方面,一種計算機可讀存儲介質,所述計算機可讀存儲介質中存儲有程序,該程序被處理器執行時實現所述的方法。
64、本發明的上述方案至少包括以下有益效果。
65、通過精確控制無人機的飛行路線,可以確保對目標區域進行全面且高效的測繪。通過接收反射信號并計算時間差,可以精確測量出無人機與目標地形區域之間的距離,這種方法具有高精度和快速響應的特點,有助于提高地形測繪的準確性和效率。將時間差轉換為距離觀測值,可以直觀地反映無人機與目標區域之間的實際距離。通過不斷更新狀態估計值,可以實時跟蹤無人機的位置和目標區域的變化,確保測繪數據的實時性和準確性。
66、通過不斷重復測量過程,可以全面覆蓋目標區域,確保獲取到完整且連續的地形數據。采用加密算法進行數據傳輸,可以確保數據在傳輸過程中的安全性和完整性。實時傳輸功能則保證了地面處理系統能夠及時接收到最新的測繪數據,提高處理效率。
67、預處理步驟可以去除原始數據中的噪聲和異常值,提高數據的可靠性和準確性。結合無人機的飛行軌跡和姿態信息,可以對預處理后的數據進行精確的三維空間定位解算。
68、通過構建網格模型并進行平滑處理和紋理映射,可以生成逼真的三維地形模型。這種模型不僅具有高度的真實感和可視化效果,還有助于更好地理解和分析目標區域的地形特征。
- 還沒有人留言評論。精彩留言會獲得點贊!